1.本发明涉及海洋环境监测与探测装备,尤其涉及一种深海泥火山原位监测系统和方法。
背景技术:
2.深海泥火山一直是深海资源开发的一个重点关注对象,而且泥火山的长期处于不稳定状态,其活动也具有不确定的周期性,活动过程通常会伴有大量的热量和甲烷释放,对于海洋水体酸化和全球气候变暖有着重要影响。目前对深海泥火山的周期性活动尤其是地形变化所采用的监测方法为动用探测船只进入海洋中进行长时间的监测,但因为动用船只进行多次多波束水深测量成本极高,所以很大程度上限制了对深海泥火山的监测,缺乏对泥火山地形进行长时间的时间序列测试,无法获得泥火山的动态地形变化和喷发活动。
技术实现要素:
3.为了克服现有技术的不足,本发明的目的之一在于提供一种深海泥火山原位监测系统,其能解决监测深海泥火山必须动用船只造成成本过高的问题。
4.为了克服现有技术的不足,本发明的目的之二在于提供一种深海泥火山原位监测方法,其能解决监测深海泥火山必须动用船只造成成本过高的问题。
5.为了达到上述目的之一,本发明所采用的技术方案如下:
6.一种深海泥火山原位监测系统,包括用于形成监测路径的导向机构和用于沿监测路径对泥火山进行周期性监测的监测机构,所述监测机构包括机架、用于处理监测数据的数据采集舱、用于监测泥火山的监测组件和用于引导监测机构沿监测路径运动的导航组件,所述数据采集舱、监测组件和导航组件均设置在机架上,所述监测组件和导航组件均与数据采集舱连接,所述导向机构与导航组件连接。
7.优选的,所述导向机构包括若干沿监测路径设置的导向组件,所述导向组件包括用于向导航组件发送监测路径的无线导向模块、设置在海底的锚体和用于连接无线导向模块和锚体的固定绳索,所述无线导向模块通过导航组件与数据采集舱连接。
8.优选的,还包括用于监测监测路径的遥感模块,所述遥感模块通过无线导向模块与导航组件连接。
9.优选的,所述固定绳索为凯夫拉绳和包塑钢缆其中的一种或多种。
10.优选的,所述导航组件包括用于接收监测路径的无线导航模块、用于调整监测机构潜浮深度的浮力腔和若干驱动水轮,所述无线导航模块、浮力腔和驱动水轮均设置在机架上,所述无线导航模块、浮力腔和驱动水轮均与数据采集舱连接。
11.优选的,所述导向机构包括用于形成监测路径的导向导轨、设置在海底的锚体和用于连接导向导轨和锚体的固定支架,所述导航组件与导向导轨滑动连接。
12.优选的,所述导航组件包括导轮,所述机架通过导轮与导向导轨滑动连接。
13.优选的,所述监测组件包括多波束声呐、ctd、甲烷传感器和温度传感器,所述多波
束声呐、甲烷传感器和温度传感器均与数据采集舱连接。
14.为了达到上述目的之二,本发明所采用的技术方案如下:
15.一种深海泥火山原位监测方法,所述方法包括一应用于深海泥火山原位监测系统的数据采集舱,所述深海泥火山原位监测系统包括用于形成监测路径的导向机构和用于沿监测路径对泥火山进行周期性监测的监测机构,所述监测机构包括机架、用于处理监测数据的数据采集舱、用于监测泥火山的监测组件和用于引导监测机构沿监测路径运动的导航组件,所述数据采集舱、监测组件和导航组件均设置在机架上,所述监测组件和导航组件均与数据采集舱连接,所述导向机构与导航组件连接;所述导向机构包括若干沿监测路径设置的导向组件,所述导向组件包括用于向导航组件发送监测路径的无线导向模块、设置在海底的锚体和用于连接无线导向模块和锚体的固定绳索,所述无线导向模块通过导航组件与数据采集舱连接;还包括用于监测监测路径的遥感模块,所述遥感模块通过无线导向模块与导航组件连接;所述导航组件包括用于接收监测路径的无线导航模块、用于调整监测机构潜浮深度的浮力腔和若干驱动水轮,所述无线导航模块、浮力腔和驱动水轮均设置在机架上,所述无线导航模块、浮力腔和驱动水轮均与数据采集舱连接,所述监测组件包括多波束声呐、ctd、甲烷传感器和温度传感器,所述多波束声呐、甲烷传感器和温度传感器均与数据采集舱连接。
16.所述数据采集舱包括储存器和处理器;
17.储存器,用于存储程序指令;
18.处理器,用于运行所述程序指令,以执行以下步骤:
19.通过无线导航模块获得无线导向模块发送的监测路径;
20.判断当前移动轨迹与监测路径是否一致,若是,则保持状态,若否,则通过驱动水轮和/或浮力腔调整当前移动轨迹;
21.通过监测组件获取水域的水体情况和海底的地形变化。
22.优选的,所述无线导向模块获得监测路径的过程如下:
23.预先将监测路径储存至无线导向模块;
24.通过遥感模块判断当前监测路径是否存在障碍,若否,则将允许无线导向模块将预先储存的监测路径发送至无线导航模块,若是,则将形成新的监测路径,替换储存在无线导向模块中,再发送至无线导航模块。
25.相比现有技术,本发明的有益效果在于:通过设置监测机构在深海中沿监测路径对泥火山进行周期性监测,以取代探测船的作用,减少探测船出海的次数和时间,同时利用监测机构的监测组件对深海泥火山所在的海洋环境和地理进行环境监测,以获得泥火山所在水域的水体情况和海底地形变化,从而了解到泥火山的地形变化和活动规律,以便于后续的研究和数据分析。
附图说明
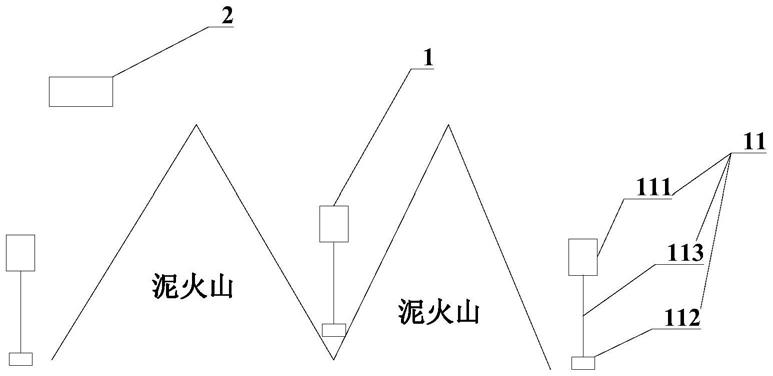
26.图1为实施例一中所述的深海泥火山原位监测系统结构示意图。
27.图2为实施例一中所述的监测机构。
28.图3为实施例二中所述的深海泥火山原位监测系统结构示意图。
29.图中:1
‑
导向机构;11
‑
导向组件;111
‑
无线导向模块;112
‑
锚体;113
‑
固定绳索;
12
‑
导向导轨;13
‑
固定支架;2
‑
监测机构;21
‑
数据采集舱;22
‑
监测组件;23
‑
导航组件;231
‑
无线导航模块;232
‑
浮力腔;233
‑
驱动水轮。
具体实施方式
30.以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
31.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
32.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
33.下面,结合附图以及具体实施方式,对本发明做进一步描述:
34.在本发明中,所述数据采集舱21包括数据存储模块和数据处理模块,其中存储模块用于储存监测数据以及监测路径,数据处理模块用于进行数据处理和分析;所述凯夫拉绳由kevlar(r)纤维编织而成kevlar(r)纤维有极高的强度,大于28克/旦,是优质钢材的5
‑
6倍,模量是钢材或玻璃纤维的2
‑
3倍,韧性是钢材的2倍,而重量仅为钢材的1/5。
35.实施例一:
36.如图1
‑
2所示,一种深海泥火山原位监测系统,包括用于形成监测路径的导向机构1和用于沿监测路径对泥火山进行周期性监测的监测机构2,所述监测机构2包括机架、用于处理监测数据的数据采集舱21、用于监测泥火山的监测组件22和用于引导监测机构2沿监测路径运动的导航组件23,所述数据采集舱21、监测组件22和导航组件23均设置在机架上,所述监测组件22和导航组件23均与数据采集舱21连接,所述导向机构1与导航组件23连接。优选的,所述监测组件22包括多波束声呐、甲烷传感器和温度传感器等监测装置,所述多波束声呐、甲烷传感器和温度传感器均与数据采集舱21连接。在本实施例中,所述监测机构2沿监测路径对泥火山进行周期性监测时,通过甲烷传感器和温度传感器等监测装置获取泥火山所在水域的水体情况,同时利用多波束声呐对泥火山的地形进行监测,从而获取泥火山的地形变化和活动规律,再结合水体情况实现高精度的泥火山原位监测。
37.具体的,所述导向机构1包括若干沿监测路径设置的导向组件11,所述导向组件11包括用于向导航组件23发送监测路径的无线导向模块111、设置在海底的锚体112和用于连接无线导向模块111和锚体112的固定绳索113,所述无线导向模块111通过导航组件23与数据采集舱21连接。优选的,所述固定绳索113为凯夫拉绳和包塑钢缆其中的一种或多种。在本实施例中,所述导向组件11的数量至少为2,分别设置在监测路径的起点和终点,即在泥火山两端的稳定区域,在本实施例中,监测路径横跨泥火山区域,其起点和终点分别设置在泥火山两侧的稳定区域(远离喷发口、不易受影响的区域),通过无线导向模块111向监测机
构2的导航组件23发送监测路径,以使监测机构2沿监测路径移动并进行监测,优选的,导航信息可以以电磁波、声波等为载体在无线导向模块111和无线导航模块231之间进行传播;进一步的,为了更有效地规划监测路径,以及监测更准确,可在监测路径的起点和终点之间设置多个导向组件11,其中,设置在起点和终点之间的导向组件11均因监测需求设置,并且避开泥火山喷发口,以避免导向组件11被损坏,从而更加清楚地标记监测路径以及必要的监测点,使得监测机构2的监测更加准确,获得的数据更有代表性。优选的,还包括用于监测监测路径的遥感模块,所述遥感模块通过无线导向模块111与导航组件23连接。在本实施例中,每一个导向组件11分别通过遥感模块监控与其相邻的监测路径,利用遥感技术获得监控路径是否处于通路状态(通过遥感技术监测监控路径是否有障碍物,例如鱼群或者变形的海底岩层),若是则保持原路径不变,若否,则调整路径,避免监控机构影响生物群落的正常活动或者避免监控机构受到破坏,实现紧急避险。进一步的,在固定绳索113和锚体112之间还设置有声学释放器,当深海泥火山喷发或者回收设备时,接收监测机构2或者探测船的指令,进行脱钩,直接回收无线导向模块111,降低回收难度。
38.优选的,所述导航组件23包括用于接收监测路径的无线导航模块231、用于调整监测机构2潜浮深度的浮力腔232和若干驱动水轮233(可向监测机构2提供动力,并向某一方向移动),所述无线导航模块231、浮力腔232和驱动水轮233均设置在机架上,所述无线导航模块231、浮力腔232和驱动水轮233均与数据采集舱21连接。具体的,所述无线导航模块231获取无线导向模块111发送的监测路径,并将监测路径传输至数据采集舱21,由数据采集舱21分析监测路径,并通过ctd(温度、盐度、深度)传感器和深海方位仪等传感器获取监测机构2当前位置,再通过浮力腔232调整监测机构2的潜浮深度,同时通过驱动水轮233驱使监测机构2沿当前的监测路径移动,具体的,所述机架为弹性材料制成,浮力腔232内包括浮力调节装置,所述浮力调节装置包括气缸、活塞和直线推杆电机以及固定架,所述活塞安装于所述气缸内,并可在所述气缸内滑动,所述活塞封闭所述气缸的开口,形成封闭空间,所述直线推杆电机的输出轴与所述活塞固定连接,所述固定架的一端与所述气缸固定连接,另一端与所述直线推杆电机连接。当需要上浮时,直线推杆电机拉动活塞扩大封闭空间的体积(直线推杆电机产生的动力有限,仅能在一定范围内压缩或者扩大封闭空间的体积),所述浮力调节装置的体积增大,并且在浮力腔232内所占空间增大,从而使浮力腔232体积增大,进而使监测机构2的总体积增大,总体密度随之降低,并小于水的密度,实现上浮。反之,直线推杆电机推动活塞压缩封闭空间的体积,使浮力腔232体积减小,进而使监测机构2的总体积减小,总体密度变大,并大于水的密度,实现下潜。优选的,所述浮力腔232内设置有水泵和用于装载液体的腔室,下潜时,通过水泵将海水抽进腔室内,以使监测机构2自身的重力大于所受到浮力,故监测机构2下潜,上升时,通过水泵将腔室内的液体排出,以使监测机构2自身的重力小于所受到浮力,故监测机构2上升。进一步的,当监测路径与洋流相重合且监测机构2的移动方向与洋流方向相同时,驱动水轮233在洋流的带动下,自行转动,根据磁生电原理,驱动水轮233产生电动势,并通过反充电模块设置在机架内的电池模块进行反向充电,以提高监测机构2的续航时间。
39.实施例二:
40.如图3所示,一种深海泥火山原位监测系统,包括用于形成监测路径的导向机构1和用于沿监测路径对泥火山进行周期性监测的监测机构2,所述监测机构2包括机架、用于
处理监测数据的数据采集舱21、用于监测泥火山的监测组件22和用于引导监测机构2沿监测路径运动的导航组件23,所述数据采集舱21、监测组件22和导航组件23均设置在机架上,所述监测组件22和导航组件23均与数据采集舱21连接,所述导向机构1与导航组件23连接。优选的,所述监测组件22包括多波束声呐、甲烷传感器和温度传感器等监测装置,所述多波束声呐、甲烷传感器和温度传感器均与数据采集舱21连接。在本实施例中,所述监测机构2沿监测路径对泥火山进行周期性监测时,通过甲烷传感器和温度传感器等监测装置获取泥火山所在水域的水体情况,同时利用多波束声呐对泥火山的地形进行监测,从而获取泥火山的地形变化和活动规律,再结合水体情况实现高精度的泥火山原位监测。
41.具体的,所述导向机构1包括用于形成监测路径的导向导轨12、设置在海底的锚体和用于连接导向导轨12和锚体112的固定支架13,所述导航组件23与导向导轨12滑动连接。在本实施例中,在泥火山两端的稳定区域设置锚体112和固定支架13,从而将导向导轨12架设起来,并横跨泥火山,即导向导轨12为监测路径,在本实施例中,所述导航组件23包括导轮,所述机架通过导轮与导向导轨12滑动连接。监测时,监测机构2通过导轮与导向导轨12滑动连接,并沿到导向导轨12做周期性的往返运动,以实现对泥火山进行周期性监测。
42.实施例三:
43.一种深海泥火山原位监测方法,所述方法包括一应用于深海泥火山原位监测系统的数据采集舱,所述深海泥火山原位监测系统包括用于形成监测路径的监测路径1和用于沿监测路径对泥火山进行周期性监测的监测机构,所述监测机构包括机架、用于处理监测数据的数据采集舱21、用于监测泥火山的监测组件22和用于引导监测机构沿监测路径运动的导航组件23,所述数据采集舱21、监测组件22和导航组件23均设置在机架上,所述监测组件22和导航组件23均与数据采集舱21连接,所述监测路径1与导航组件23连接;所述监测路径1包括若干沿监测路径设置的导向组件11,所述导向组件11包括用于向导航组件23发送监测路径的无线导向模块111、设置在海底的锚体和用于连接无线导向模块111和锚体的固定绳索,所述无线导向模块111通过导航组件23与数据采集舱21连接;还包括用于监测监测路径的遥感模块,所述遥感模块通过无线导向模块111与导航组件23连接;所述导航组件23包括用于接收监测路径的无线导航模块、用于调整监测机构潜浮深度的浮力腔232和若干驱动水轮233,所述无线导航模块、浮力腔232和驱动水轮233均设置在机架上,所述无线导航模块、浮力腔232和驱动水轮233均与数据采集舱21连接,所述监测组件22包括多波束声呐、ctd、甲烷传感器和温度传感器,所述多波束声呐、甲烷传感器和温度传感器均与数据采集舱21连接。;
44.所述数据采集舱21包括储存器和处理器;
45.储存器,用于存储程序指令;
46.处理器,用于运行所述程序指令,以执行以下步骤:
47.在本实施例中预先将导向组件11分别设置在监测路径的起点和终点,即在泥火山两端的稳定区域,优选的,在监测路径的起点和终点之间设置多个导向组件11,其中,设置在起点和终点之间的导向组件11均因监测需求设置,并且避开泥火山喷发口,以避免导向组件11被损坏,从而更加清楚地标记监测路径以及必要的监测点,使得监测机构2的监测更加准确,获得的数据更具有代表性。
48.预先将监测路径储存至无线导向模块111;
49.预先在下水之前对导向组件11进行授时和预储存监测路径,以使监测机构2可以按照预先储存的监测路径进行监测作业。
50.通过遥感模块判断当前监测路径是否存在障碍,若否,则将允许无线导向模块111将预先储存的监测路径发送至无线导航模块231,若是,则将形成新的监测路径,替换储存在无线导向模块111中,再发送至无线导航模块231。
51.具体的,遥感模块通过遥感技术对当前监测路径进行遥感,判断是否存在生物群落或者有地形变化导致原先的监测路径无法通行,若无,则允许无线导向模块111将预先储存的监测路径发送至无线导航模块231,使监测机构2按照预先储存的监测路径进行监测作业;若有,则根据遥感数据重新规划监测路径,替换掉原来的储存的监测路径,形成新的监测路径,再将新的监测路径发送至无线导航模块231
52.通过无线导航模块231获得无线导向模块111发送的监测路径;
53.判断当前移动轨迹与监测路径是否一致,若是,则保持状态,若否,则通过驱动水轮233和/或浮力腔232调整当前移动轨迹;
54.具体的,获取到监测路径后,先判断监测路径与当前移动轨迹(预测航行)是否一致,若是,则保持当前状态,以保障实际移动轨迹与监测路径一致,若否,则通过驱动水轮233和/或浮力腔232调整当前移动轨迹(预测航行),以进入监测路径,进入监测路径后,通过监测组件22获取水域的水体情况和海底的地形变化。
55.对本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及形变,而所有的这些改变以及形变都应该属于本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

