一种基于nfc和方位角计算的规范停车方法
技术领域
1.本发明涉及停车方法,尤其涉及基于近场通信和方位角计算的规范停车方法。
背景技术:
2.近场通信(near field communication,nfc)是一种短距高频的无线电技术。
3.目前共享单车(特别是共享电单车)的还车基本上都是基于车辆定位确认还车位置,根据车辆上传的gps经纬度或者北斗定位的经纬度确定车辆位置,这种技术主要依赖gps或者北斗定位的经纬度来进行分析,在忽略校准带来误差的情况下,主要依靠终端的定位精度来提高车辆运动轨迹的准确度,由于gps定位的精度会受到很多环境因素的影响,这样会导致定位偏差,从而导致了单车随处停放,未能在指定区域停放,对交通造成了巨大的不变,影响了交通秩序。
4.这种依赖终端定位精度的方式缺点在于:
5.1、车辆位置的精准度依赖终端的定位精度。
6.2、受gps漂移的影响,会造成很多定位的漂移。
7.3、受gps定位精度影响,车辆实际停车位置会有一定的偏差。
技术实现要素:
8.本发明的目的是为了解决现有技术中存在的上述问题,通过nfc技术确认车辆停放在合法区域,再通过垂直停车技术确认车辆停放是否有序,从而实现规范停车功能。
9.为了解决现有技术中问题,本发明提供了一种基于nfc和方位角计算的规范停车方法。
10.首先在地图上依据实际情况画出一个个合法的停车区域,记录好区域的经纬度集合,在设定好的区域范围内,安装相应的nfc感应片,当用户借车骑行后,在站点还车时,根据具体能否感应到nfc感应片来确认车辆是否在合法区域内还车,之后对具体每个站点还车时车辆停靠方向进行具体划分,计算出其正确停靠方向与正北方向夹角,终端通过陀螺仪技术计算出此刻车辆车头与正北方向角度,当角度符合条件时即可还车。
11.一种基于nfc和方位角计算的规范停车方法,其特征在于,包括如下步骤:
12.步骤1:划分合法还车区域:根据实际情况,在地图上划分一个个合法的停车区域;
13.步骤2:安装还车nfc装置:在对应的实际地点安装nfc感应条;
14.步骤3:划分还车方向:在地图上划分好的一个个合法的停车区域,对具体每一个区域进行还车方向绘制,确认出具体还车的方向角;
15.步骤4:还车校验:车辆在还车时,终端主动去查询周围有没有nfc信号,收到信号,那说明车辆此刻处于合法的还车区域a,未收到则无法还车,然后再对车辆还车角度进行判断,符合角度范围的要求,即可还车;
16.步骤5:判断还车方位角的方法:
17.首先所划的还车方向是有两个经纬度点a、b,具体的方向为从b到a,球心为o,假设
a的经度是lona,纬度是lata,b的经度是lonb,纬度是latb,首先将两点经纬度角度值转化成对应的弧度,即b点的经度转化为弧度hby=lonb*π/180,纬度转化就是hbx=latb*π/180,其具体公式如下:
18.角度angle=arctan(|dx/dy|)*180/π;
19.dx=(lonb*π/180
‑
lona*π/180)*ed;
20.dy=(latb*π/180
‑
lata*π/180)*ec;
21.ec=rj (rc
‑
rj)*(90
‑
lata)/90;
22.ed=ec*cos(lata*π/180);
23.其中rc为赤道半径,rj为地球半径,地球是一个近似球体,rc与rj稍微有点差距;ec的作用就是修正因为纬度不断变化的球半径长度,如果在赤道上的时候,ec=rj (rc
‑
rj)*(90
‑
0)/90=rc,那ec就刚好是赤道半径rc;如果在极点=90,ec=rj (rc
‑
rj)*(90
‑
90)/90=rj,那ec就刚好是极半径rj,dx代表将经度的差值换算到具体平面直角坐标系x的长度,dy标识将纬度的差值换算到具体平面直角坐标系y的长度,cos()为求具体值的余弦值,之后通过反正切函数获取其角度。
24.作为本发明的进一步改进,所述划定的区域在地图上由经纬度点集合组成,此区域为多边形。
25.作为本发明的进一步改进,所述区域为矩形。
26.作为本发明的进一步改进,步骤3中,方向角使用车头与正北方向的夹角,将其记录绑定停车区域。
27.作为本发明的进一步改进,步骤4中,停车角度的要求范围是:车头与正北方向夹角n为140~160度。
28.作为本发明的进一步改进,该方法中的车是指电单车或自行车。
29.本发明的有益效果是:
30.本发明修正了gps由于各种原因定位不准的误差导致车辆乱停乱放的情况。
31.本发明增加了垂直停车校验,车辆摆放更加整洁、美观。
附图说明
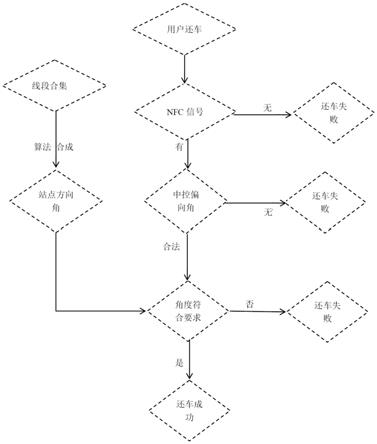
32.图1是本发明一种基于nfc和方位角计算的规范停车方法流程示意图。
具体实施方式
33.下面结合附图对本发明做进一步说明。
34.一种基于nfc和方位角计算的规范停车方法:
35.获取平台上面终端定位上传的原始轨迹数据,根据请求指定的地图类型将数据进行校准,请求第三方对应地图的数据。
36.在合法区域内划分出具体一个个站点,在每个站点安装nfc感应带,划定具体停车车头停放方向,将对应关系录入系统。
37.在用户还车时,未感应到nfc信号,不许还车,当感应到nfc信号,在对车辆摆放的方向进行判断,方向不一致,不许还车,方向一致或在我们误差范围内,可以还车。
38.具体包括以下步骤:
39.步骤1:划分合法还车区域:根据实际情况,在地图上划分一个个合法的停车区域,划定的区域在地图上由经纬度点集合组成,此区域一般为多边形。
40.步骤2:安装还车nfc装置:在对应的实际地点安装nfc感应条,划分合法的感应条。
41.步骤3:划分还车方向:在地图上划分好的一个个合法的停车区域,对具体每一个区域进行还车方向绘制,即确认出具体还车的方向角,一般使用的是与正北方向的夹角,将其记录绑定停车区域。
42.步骤4:还车校验:车辆在还车时,终端主动去查询周围有没有nfc信号,收到信号,那说明车辆此刻处于合法的还车区域a,未收到则无法还车,然后再对车辆还车角度进行判断,假如平台上还车区域a划定的合法停车方向n是车头与正北方向夹角为150度,误差范围是正负10度,则车辆合法的还车角度是140~160度,此刻车辆上传的角度m在这个范围内即可还车。
43.步骤5:判断还车方位角的方法:
44.首先所划的还车方向是有两个经纬度点a、b组成,具体的方向为从b到a,球心为o,假设a的经度是lona,纬度是lata,b的经度是lonb,首先将两点经纬度角度值转化成对应的弧度,即b点的经度转化为弧度hby=lonb*π/180,纬度转化就是hbx=latb*π/180,其具体公式如下
45.角度angle=arctan(|dx/dy|)*180/π;
46.dx=(lonb*π/180
‑
lona*π/180)*ed
47.dy=(latb*π/180
‑
lata*π/180)*ec
48.ec=rj (rc
‑
rj)*(90
‑
lata)/90;
49.ed=ec*cos(lata*π/180)
50.其中rc为赤道半径,rj为地球半径,地球是一个近似球体,rc与rj稍微有点差距。ec的作用就是修正因为纬度不断变化的球半径长度。如果在赤道上的时候,ec=rj (rc
‑
rj)*(90
‑
0)/90=rc,那ec就刚好是赤道半径rc;如果在极点=90,ec=rj (rc
‑
rj)*(90
‑
90)/90=rj,那ec就刚好是极半径rj,dx代表将经度的差值换算到具体平面直角坐标系x的长度,dy标识将纬度的差值换算到具体平面直角坐标系y的长度,math.cos()为求具体值的余弦值,之后通过反正切函数获取其角度。
51.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。