一种防缠绕安全扫地机器人及方法
1.本技术是申请日为2020年08月09日,申请号为cn202010792577.6的发明名称为一种防缠绕安全扫地机器人的分案申请。
技术领域
2.本发明属于机器人领域,尤其是涉及一种防缠绕安全扫地机器人及方法。
背景技术:
3.随着人们生活水平的提高,扫地机器人正逐步替代人工用于家庭清洁,扫地机器人的使用,大大降低了人们的劳动强度,也方便了人们的生活休息。
4.然而家庭中地面难免会掉落头发、棉絮等,传统的扫地机器人在清扫过程中,会将头发、棉絮等杂物抽吸卷绕在刷辊上,久而久之严重影响刷辊的清扫效果,且刷辊上缠绕较多杂物时,极易造成刷辊变形、弯折,甚至导致电机烧毁等问题,需频繁清理,十分不便。
5.为此,我们提出一种防缠绕安全扫地机器人来解决上述问题。
技术实现要素:
6.本发明的目的是针对上述刷辊上易缠绕杂物的问题,提供一种可自动清除刷辊上杂物的防缠绕安全扫地机器人。
7.为达到上述目的,本发明采用了下列技术方案:一种防缠绕安全扫地机器人,包括机体,所述机体的下表面设有吸尘口,所述吸尘口内设有水平设置的刷辊,所述刷辊的上方设有两块切割板,两块所述切割板的下端均等距排布有切割刀片,所述吸尘口的一侧设有驱动腔,两块所述切割板靠近驱动腔的一端均固定连接有滑动杆,两根所述滑动杆交错设置且均延伸至驱动腔内,两根所述滑动杆均通过复位弹簧与驱动腔的内侧壁固定连接,所述驱动腔内设有电机,所述电机的输出轴上同轴安装有拨轮,所述拨轮的侧壁上固定连接有两个相对设置的拨块,两根所述滑动杆的侧壁上均固定连接有与拨块匹配的凸起块,所述拨轮的侧壁上固定连接有环形磁铁,所述环形磁铁由两个磁极相反的磁性半圆环组成,所述驱动腔的顶面固定安装有永磁块。
8.本发明的优点在于:清扫工作状态下,环形磁铁与永磁块处于异极相吸状态,两块切割板处于较高位置,切割刀片不与刷辊上的刷毛接触,此时刷辊在机体内驱动件带动下转动,对地面进行清扫,当刷辊上缠绕有较多头发、棉絮等杂物时,降低刷辊的转速,启动电机带动拨轮和环形磁铁转动,环形磁铁转动时,环形磁铁内磁极相反的两个磁性半圆环交替与永磁块靠近和远离,在磁力作用下,推动两块切割板上下往复移动,当切割板靠近刷辊时,两块切割板处于交错状态,两块切割板上的切割刀片交错不接触,避免对刷毛造成破坏,同时可将刷辊上缠绕的头发、棉絮等杂物挑起,当切割板远离刷辊向上移动时,拨轮侧壁上的拨块与凸起块接触,并拨动其滑动,带动两块切割板重合,则多个切割刀片可对头发、棉絮等杂物进行剪切割碎,如此往复,无需人工操作,即可将刷辊上的杂物清除。
9.优选的,所述切割刀片的两侧均设有刀刃。
10.优选的,所述切割刀片由金属导电材料制成,两块所述切割板相靠近一侧的侧壁上分别设有第一摩擦板和第二摩擦板,所述第一摩擦板与第二摩擦板相抵接触,所述第一摩擦板为橡胶板,所述第二摩擦板靠近第一摩擦板的侧壁上贴附有毛皮。
11.两块切割板在交错滑动过程中,带动第一摩擦板与第二摩擦板发生滑动摩擦,根据摩擦生电原理可知,与毛皮摩擦的橡胶棒将携带负电荷,则第一摩擦板与第二摩擦板的表面分别携带有负电荷和正电荷,则与其接触的两组切割刀片上分别携带有负电荷和正电荷,切割板处于下方位置处时,根据静电吸附原理,可将刷辊上缠绕的毛发、棉絮吸附携带,切割板向上移动时,两组切割刀片接触,其表面正电荷与负电荷中和消失,对剪切割碎后杂物的静电吸附力消失,则剪切割碎后的杂物更易被抽吸排出,保证刷辊的清扫效果。
附图说明
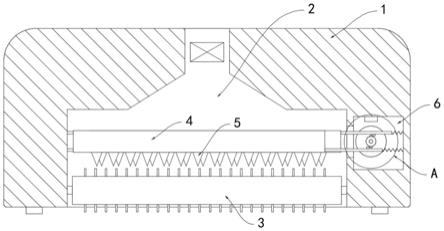
12.图1是本发明提供的一种防缠绕安全扫地机器人实施例1的结构示意图;
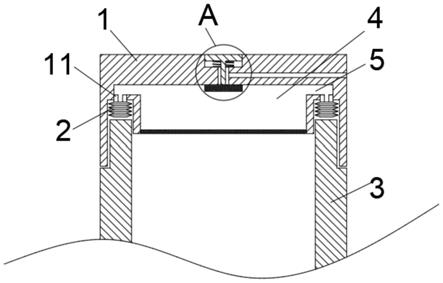
13.图2是图1中a处放大图;
14.图3是本发明提供的一种防缠绕安全扫地机器人实施例2中切割板的侧面结构示意图。
15.图中,1机体;2吸尘口;3刷辊;4切割板;5切割刀片;6驱动腔;7滑动杆;8复位弹簧;9电机;10拨轮;11拨块;12凸起块;13环形磁铁;14永磁块;15第一摩擦板;16第二摩擦板。
具体实施方式
16.以下实施例仅处于说明性目的,而不是想要限制本发明的范围。
17.实施例1
18.如图1
‑
2所示,一种防缠绕安全扫地机器人,包括机体1,机体1的下表面设有吸尘口2,吸尘口2内设有水平设置的刷辊3,刷辊3的上方设有两块切割板4,两块切割板4的下端均等距排布有切割刀片5,切割刀片5的两侧均设有刀刃。
19.吸尘口2的一侧设有驱动腔6,两块切割板4靠近驱动腔6的一端均固定连接有滑动杆7,两根滑动杆7交错设置且均延伸至驱动腔6内,两根滑动杆7均通过复位弹簧8与驱动腔6的内侧壁固定连接,驱动腔6内设有电机9,电机9可在驱动腔6的侧壁上沿竖直方向滑动,电机9的输出轴上同轴安装有拨轮10,拨轮10的侧壁上固定连接有两个相对设置的拨块11,两根滑动杆7的侧壁上均固定连接有与拨块11匹配的凸起块12,拨轮10的侧壁上固定连接有环形磁铁13,环形磁铁13由两个磁极相反的磁性半圆环组成,驱动腔6的顶面固定安装有永磁块14。
20.本实施例的工作原理如下:清扫工作状态下,环形磁铁13与永磁块14处于异极相吸状态,两块切割板4处于较高位置,切割刀片5不与刷辊3上的刷毛接触,此时刷辊3在机体1内驱动件带动下转动,对地面进行清扫。
21.当刷辊3上缠绕有较多头发、棉絮等杂物时,降低刷辊3的转速,启动电机9带动拨轮10和环形磁铁13转动,环形磁铁13内磁极相反的两个磁性半圆环交替与永磁块14靠近和远离,在磁力作用下,推动两块切割板4上下往复移动,当切割板4靠近刷辊3时,两块切割板4处于交错状态,两块切割板4上的切割刀片5交错不接触,避免对刷毛造成破坏,同时可将刷辊3上缠绕的头发、棉絮等杂物挑起,当切割板4远离刷辊3向上移动时,拨轮10侧壁上的
拨块11与凸起块12接触,并拨动其滑动,带动两块切割板4重合,则多个切割刀片5可对头发、棉絮等杂物进行剪切割碎,如此往复,无需人工操作,即可将刷辊3上的杂物清除。
22.实施例2
23.如图3所示,本实施例与实施例1的不同之处在于:切割刀片5由金属导电材料制成,两块切割板4相靠近一侧的侧壁上分别设有第一摩擦板15和第二摩擦板16,第一摩擦板15与第二摩擦板16相抵接触,第一摩擦板15为橡胶板,第二摩擦板16靠近第一摩擦板15的侧壁上贴附有毛皮。
24.在本实施例中,两块切割板4在交错滑动过程中,带动第一摩擦板15与第二摩擦板16发生滑动摩擦,根据摩擦生电原理可知,与毛皮摩擦的橡胶棒将携带负电荷,则第一摩擦板15与第二摩擦板16的表面分别携带有负电荷和正电荷,则与其接触的两组切割刀片5上分别携带有负电荷和正电荷,切割板4处于下方位置处时,根据静电吸附原理,可将刷辊3上缠绕的毛发、棉絮吸附携带,切割板4向上移动时,两组切割刀片5接触剪切,其表面正电荷与负电荷中和消失,对剪切割碎后杂物的静电吸附力消失,则剪切割碎后的杂物更易被抽吸排出,保证刷辊3的清扫效果。
25.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。