1.本文公开了例如用于在外科手术期间相对于患者稳定端口或其它外科进入装置的外科进入稳定装置和相关方法。
背景技术:
2.在许多情况下,可能期望稳定器械或物体。在外科应用中,例如,可能期望在外科手术期间相对于患者稳定外科进入装置,例如像端口。以另一个示例的方式,可能期望在外科手术期间建立、稳定和保持外科进入装置的期望轨线,以适应经由皮肤穿过进入装置到达手术部位的器械、物体(例如植入物)等。此外,可能期望以如下方式稳定外科进入装置:在手术期间最小化对外科手术的干扰并且允许将外科进入装置容易且快速地调整到不同位置(如果需要的话)。
3.在当前实践中,外科器械或物体常常通过连接或连结到另一个器械或物体来稳定。通常,刚性连接器用于通过将外科器械连接或连结到支撑件来稳定外科器械。例如,机械臂连接器可用于将外科进入装置连接到支撑件诸如手术床或刚性植入物柱,以在外科手术期间稳定进入装置。现有技术的稳定方法和装置依赖于手术部位处或附近的至少一个另外的静止物体来连结到外科进入装置。此类系统在其中操作区域尺寸小且仅有限量的空间可用于操纵的微创外科手术中可能尤其繁重。
4.此外,使用刚性机械臂连接器来稳定外科进入装置以若干方式约束外科手术。例如,支撑件(例如,手术台或刚性植入物柱)的位置基于机械连接器的尺寸和构型决定了进入装置的位置。类似地,现有技术的刚性机械连接器一旦连接到支撑件就会限制进入装置移动的范围。通常,外科医生期望在外科手术期间基于手术的解剖结构在至少一个优选方向上进行更大范围的运动。例如,在脊柱手术中,外科医生通常想要能够在横向于脊柱的方向上实现更大端口移动。由于连接器和附带的支撑结构的物理约束,刚性连接器阻止了这种期望的移动。此外,外科手术的流程可由现有技术的连接器稳定系统决定,而不是由外科医生的专业知识决定。例如,在通过连接到椎弓根螺钉或其它植入物柱来稳定外科进入装置的情况下,在插入和稳定进入装置之前,必须首先将对侧螺钉放置在患者体内。
5.因此,仍然需要用于在外科手术期间以更容易、约束更小的方式建立、稳定和保持外科器械、特别是外科进入装置的期望轨线和定位的装置和技术。
技术实现要素:
6.本发明整体提供用于稳定外科进入装置的装置和方法。具体地,可使用本文所述的装置和方法将外科进入装置(诸如端口)相对于锚定部表面(例如,患者的皮肤)稳定在外科切口内。在本发明的一个方面,提供一种外科进入稳定装置,该装置包括:垫,该垫具有面向近侧的表面和面向远侧的粘合剂表面;外科进入装置,该外科进入装置联接到垫;以及锁定机构,该锁定机构相对于垫选择性地锁定外科进入装置的位置。
7.上述外科进入稳定装置可具有在本发明的范围之内的多种修改。例如,在一些实
施方案中,垫可具有延伸穿过其以接纳锁定机构的开口。进一步地,在一些实施方案中,开口可为细长狭槽。在一些实施方案中,开口可居中地位于垫上。垫还可包括成像特征部以有助于对垫成像。在一些实施方案中,垫可包括导航特征部以有助于对外科进入装置导航。在某些实施方案中,垫可具有中心部分,该中心部分具有至少一个径向指状物。在一些实施方案中,垫可由柔性织物、弹性体和聚合物中的任一种制成。
8.在一些实施方案中,锁定机构可在沿垫的面向近侧的表面的方向上选择性地锁定外科进入装置的平移移动。在一些实施方案中,锁定机构可在横向于垫的面向近侧的表面的方向上选择性地锁定外科进入装置的平移移动。更进一步地,在一些实施方案中,锁定机构可选择性地锁定外科进入装置的旋转移动和外科进入装置的角移动中的任一者。本发明的锁定机构可采取多种形式。例如,在一些实施方案中,锁定机构可包括至少一个锁环。而在其它实施方案中,锁定机构可包括可释放粘合剂和钩环紧固件中的任一者。
9.在另一方面,提供一种外科进入稳定系统,该系统包括:垫,该垫具有面向近侧的表面和面向远侧的粘合剂表面;外科进入装置,该外科进入装置限定工作通道;以及连接机构,该连接机构联接在垫与外科进入装置之间以将外科进入装置放置在远离垫的位置处。
10.上述外科进入稳定系统可具有在本发明的范围之内的多种修改。例如,在一些实施方案中,连接机构可包括臂,该臂在第一端部处联接到外科进入装置并且在第二端部处联接到垫。进一步地,在一些实施方案中,臂可能够弯曲以调整第一端部相对于第二端部的布置。
11.在另一方面,提供一种稳定外科进入装置的方法,该方法包括:在患者体内制造切口;将垫粘合到患者;穿过患者体内的切口插入外科进入装置;将外科进入装置联接到垫;以及相对于垫选择性地锁定外科进入装置的位置。
12.上述外科进入稳定方法可具有在本发明的范围之内的多种修改。例如,在一些实施方案中,该方法还可包括:通过相对于垫对外科进入装置进行平移、旋转和成角度中的至少一者来将外科进入装置定位在切口内。
13.在其它实施方案中,选择性地锁定外科进入装置的位置可防止相对于垫对外科进入装置进行进一步平移、旋转或成角度。
14.在一些实施方案中,垫可在制造切口之后粘合到患者。在其它实施方案中,垫可在制造切口之前粘合到患者。在某些实施方案中,垫可在远离切口的位置处粘合到患者。
15.在一些实施方案中,将外科进入装置联接到垫可包括:将外科进入装置定位在垫的开口内。在其它实施方案中,将外科进入装置联接到垫可包括:利用连接器臂将外科进入装置连结到垫。
16.在其它实施方案中,外科进入装置稳定方法还可包括:在穿过切口插入外科进入装置之后,从外科进入装置展开垫的至少一部分。
17.上述特征或变型中的任一者能够以多种不同的组合应用于本公开的任何特定方面或实施方案。没有明确叙述任何特定的组合仅仅是为了在本发明内容中避免赘述。
附图说明
18.结合附图根据下列详细描述,将更全面地理解上述本发明的方面和实施方案,其中:
19.图1是具有基底垫和锁定机构的外科进入稳定装置的一个实施方案的透视图,在该外科进入稳定装置中设置有外科进入装置;
20.图2是图1的外科进入稳定装置的透视图;
21.图3是图1的其中设置有外科进入装置的外科进入稳定装置的剖视图;
22.图4是图1的其中设置有外科进入装置的外科进入稳定装置的透视图;
23.图5是图1的基底垫的透视图;
24.图6是具有图1的锁定机构的接合基座部分的垫的透视图;
25.图7是具有图6的接合基座部分的基底的分解图;
26.图8是图6的基座的透视图;
27.图9是图6的基座的顶视图;
28.图10是图1的其中设置有外科进入装置的外科进入稳定装置的锁定机构的基底和基座、裙状部以及开口环的透视图;
29.图11是图10的裙状部的透视图;
30.图12是图10的开口环的透视图;
31.图13是图1的锁定机构的裙状部和其中设置有外科进入装置的开口环的透视图;
32.图14是图1的锁定机构的基座、裙状部、开口环和扣环的透视图;
33.图15是图14的锁定机构部件的剖视图;
34.图16是图14的扣环的顶视图;
35.图17是图16的扣环的透视图;
36.图18是与图1的锁定机构的基座接合的扣环的顶视图;
37.图19是图19的剖视图;
38.图20是图1的其中设置有外科进入装置的外科进入稳定装置的透视图;
39.图21是图20的锁定机构的剖视图;
40.图22是第一锁块的一个实施方案的透视图;
41.图23是第二锁块的一个实施方案的透视图;
42.图24是图23的第二锁块的剖视图;
43.图25是图22的与裙状部接合的第二锁块的剖视图;
44.图26是外科进入稳定装置的一个实施方案的示例性外科应用的表示;
45.图27是外科进入稳定装置的一个实施方案的另一个示例性外科应用的表示;
46.图28是本发明的在脊柱手术中使用的其中设置有刚性端口管的外科进入稳定装置的图形表示;
47.图29是本发明的在脊柱手术中使用的其中设置有柔性阻隔端口的外科进入稳定装置的图形表示;
48.图30是外科进入稳定装置的另一个实施方案的示例性外科应用的表示;
49.图31是外科进入稳定装置的另一个实施方案的示例性外科应用的表示;
50.图32是外科进入稳定装置的另一个实施方案的示例性外科应用的表示;
51.图33是其中设置有外科进入装置的外科进入稳定装置的另一个实施方案的透视图;
52.图34是图33的外科进入稳定装置的示例性基底垫的表示;
53.图35是其中设置有外科进入装置的外科进入稳定装置的另一个实施方案的表示;
54.图36是图35的外科进入稳定装置的另一个视图;
55.图37是图35的外科进入稳定装置的另一个示例性外科应用的表示;
56.图38是图35所示的外科进入稳定装置的另一个示例性外科应用的表示;
57.图39是本发明的外科进入稳定装置的外科进入装置的另一个实施方案的图示;
58.图40是本发明的外科进入稳定装置的柄部的另一个实施方案的透视图;
59.图41是图40的柄部的分解图;并且
60.图42是图40的柄部的主体的透视图。
具体实施方式
61.现在将描述某些示例性实施方案以从整体上理解本文所公开的装置、系统和方法的结构、功能、制造和使用的原理。这些实施方案的一个或多个示例在附图中示出。本领域技术人员将理解,本文具体描述且附图中示出的装置、系统和方法是非限制性的示例性实施方案。结合一个示例性实施方案示出或描述的特征部可与其它实施方案的特征部进行组合。此类修改和变型旨在被包括在本公开的范围内。
62.另外,就在公开的装置和方法的描述中使用线性或圆形尺寸而言,此类尺寸并非旨在限制可与此类装置和方法结合使用的形状的类型。本领域中技术人员将认识到,针对任何几何形状可容易地确定此类线性和圆形尺寸的等效尺寸。更进一步地,装置及其部件的尺寸和形状可至少取决于将在其中将使用该装置的受试者的解剖结构、将与该装置一起使用的部件的尺寸和形状、以及将在其中使用该装置的方法和手术。
63.虽然所例示的实施方案和所附描述特别参考脊柱外科手术,并且具体地,参考微创脊柱外科手术中的应用,但本文所述的装置、系统和方法不限于这些应用。相反,所述的装置、系统和方法可用于需要或受益于物体的稳定的各种应用,并且具体地非常适用于外科应用,以在外科手术过程中将外科进入装置相对于患者稳定在一个或多个期望位置、轨线或取向处。
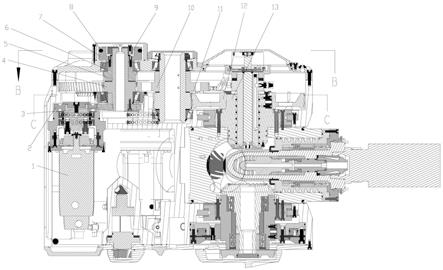
64.图1至图4示出了外科进入稳定装置100的第一示例性实施方案。装置100可用于稳定穿过患者体内的切口插入的外科进入装置,例如,端口或进入装置10。优选地,本发明的外科进入稳定装置可为患者安装的以相对于患者稳定外科进入装置。装置100可选择性地限制端口相对于患者的平移移动、旋转移动或角移动中的任一种。此外,外科进入稳定装置100可用于在外科手术期间将外科进入装置建立、稳定和保持在期望轨线处,并且根据需要而易于调整。
65.图1示出了根据本发明的外科进入稳定装置的优选实施方案。外科进入稳定装置100示出为具有接合在其中的外科进入装置,例如,端口或进入装置10。外科进入稳定装置100可包括在下文更详细地描述的基底垫102和锁定机构104。锁定机构104可被构造成将端口10联接并固定到垫102。锁定机构可进一步被构造成有利于端口10定位和调整,并且可相对于垫选择性地锁定端口的移动。垫102可具有被构造成接触并粘合到锚定部表面的面向远侧的粘合剂表面。在一个优选实施方案中,锚定部表面可为患者的皮肤,并且垫的面向远侧的表面可为患者接触表面。垫的面向近侧的表面可暴露于用户并且可包括用于在外科手术期间有利于放置垫并调整端口10的特征部。
66.图2示出了图1的其中没有设置外科进入装置的外科进入稳定装置。中心开口101可延伸穿过外科进入稳定装置100并且可被构造为接纳端口10。如图2所示,在一些实施方案中,中心开口101可延伸穿过锁定机构104和垫102。外科进入稳定装置的中心轴线a1可正交于垫的近侧表面而延伸穿过中心开口101。端口10可沿着轴线a1穿过中心开口101向远侧插入,使得端口10被接纳在外科进入稳定装置内。图3示出了图1的剖视图,其示出具有穿过中心开口101插入的端口10的外科进入稳定装置100。在此,构成锁定机构104的一个实施方案的各种部件可在组装构型中看到。在一个实施方案中,锁定机构104可包括基座200、扣环202、裙状部204、开口环206、第一锁块208和第二锁块210,其中的每一者将在下文参考另外的附图更详细地描述。
67.端口10可具有近侧端部10p和远侧端部10d以及在两者间延伸、具有纵向轴线a2的内腔20。当端口10被插入外科进入稳定装置100中时,端口10的近侧端部10p可保持在外科进入稳定装置的近侧,而端口10的远侧端部10d可穿过患者体内的切口向远侧延伸超过外科进入稳定装置到达手术部位。应当理解,在图1和图3所示的取向中,由于端口10相对于外科进入装置100的所描绘取向,外科进入稳定装置的纵向轴线a1和端口轴线a2共线。更具体地,端口10被示出为插入相对于垫102没有任何角度的外科进入装置100中,使得端口轴线a2与外科进入装置100的纵向轴线a1对准。当端口10相对于外科进入装置100成角度时,纵向端口轴线a2可相对于外科进入稳定装置的纵向轴线a1偏移或成角度。这是因为端口10相对于垫102的移动可调整端口轴线a2和稳定装置轴线a1之间的角度。例如,如可在图4中可见,端口10可在锁定机构104内相对于垫102成角度,使得端口轴线a2从外科进入稳定装置的纵向轴线a1移动角度α。应当理解,零度的角度α对应于端口10和外科进入稳定装置的纵向轴线的共线取向。
68.返回到图3,端口10可具有柄部12以允许操作者在外科进入稳定装置内操纵端口10。柄部12可包括抓持部分14和端口延伸部分16。端口延伸部分16可轴向地延伸以与近侧端口端部10p接合,使得端口延伸部分的内腔与端口内腔20对准。通过接合柄部12来延伸管腔20可有利于器械、植入物等更容易地插入穿过端口10的内腔20。在一个实施方案中,端口10的外表面可具有接合特征部18,该接合特征部被构造成与柄部12的互补接合特征部配对以将端口固定在期望纵向位置。例如,端口10的外表面可具有多个纵向对准的凹槽18。在一个实施方案中,柄部12的端口延伸部分16可具有至少一个向内延伸的突出部,该突出部被构造成与端口10的凹槽18中的至少一个凹槽选择性地接合。这样,通过调整端口延伸部分和多个凹槽18之间的接合,柄部可放置在端口10上的期望位置处。本领域的技术人员将会知道,供选择的接合方法可用来使柄部12与端口10接合。在柄部12固定到端口10的情况下,抓持件14可用于相对于垫102和轴线a1在旋转方向、角度方向或平移方向中的任一方向上移动端口10。另选地,可直接操纵端口的近侧端部10p,而不向其附接柄部以有利于端口移动。
69.抓持部分14可在基本上横向于端口轴线a2的方向上延伸,并且可被构造成有利于使用者操纵端口。抓持部分14可涵盖任何多种几何形状。在一个实施方案中,如图1和图3所描绘,抓持部分14可具有带有半圆形端部的倾斜杠杆形状。优选地,抓持主体可在近侧方向上倾斜。抓持主体14可成形为有利于使用者易于抓握和操纵。例如,抓持部分14的倾斜部分可具有可舒适地接纳使用者的手或手指的轮廓。
70.图5至图25示出了稳定装置100的各种示例性部件。图5示出了基底垫102的示例性实施方案。垫可具有面向近侧的表面102p和面向远侧的粘合剂表面(未示出)。面向远侧的粘合剂表面可粘合到锚定部表面,使得垫102固定到锚定部表面。例如,垫102可粘合到患者的皮肤,使得垫102相对于患者牢固地锚定。然而,在其它实施方案中,垫102可粘合到任何种类的表面。垫102可优选地由柔性材料制成,使得垫可与锚定部表面紧密地形成轮廓。柔性垫102可允许垫在多种应用位置中的任一种应用位置处与患者的皮肤密切地形成轮廓。垫102的面向粘合剂远侧的侧面可具有远侧粘合剂层。例如,粘合剂层可为医用级粘合剂。
71.以非限制性示例的方式,垫102可由柔性织物、弹性体和聚合物中的任一种制成。示例性材料可包括合成橡胶或天然橡胶。在一个实施方案中,垫102可由薄聚合物诸如例如橡胶、氯丁橡胶、聚四氟乙烯(ptfe)等制成。在一些实施方案中,薄聚合物垫可具有1mm至5mm的厚度。在其它实施方案中,薄聚合物垫可具有1.5mm至3.5mm的厚度。
72.垫102可具有任何各种尺寸和形状,并且可被调整成特别适合外科手术或应用。例如,垫102的形状可被构造成覆盖整个无菌消毒盖布开口。在一个实施方案中,如图5所示,垫102可具有带圆角的大致四边形状。另选地,垫可具有薄型形状以形成身材矮小的患者的解剖结构(诸如腰部)的轮廓。进一步地,垫102可被切割、修剪或以其他方式成形以有助于针对特定应用或外科手术进行放置。例如,可切割垫102以适形于可放置在手术部位处或附近的障碍物或物体。
73.垫102可具有从面向近侧的表面102p穿过垫延伸到面向远侧的表面的开口106。应当理解,开口106可具有多种不同形状和尺寸中的任一种。另外,开口106可放置在垫102上的多个不同位置处。例如,开口106可为大致圆形并且位于垫102的中心部分处,如图5所示。另选地,开口106可定位成偏心或更靠近于垫102的边缘。垫102可具有环绕开口106的凹面部分108。凹面部分108可促进锁定机构104和垫102之间的更平滑接合和相对运动。在一个实施方案中,垫102的凹面部分108可具有与锁定机构104的面向远侧部分类似的形状或如同该面向远侧部分一样弯曲,如本文将更详细地讨论。
74.垫102可具有被构造成将垫可移除地附接到锁定机构的一个或多个接合特征部。在一个实施方案中,一个或多个突出部110可从垫102的面向近侧的表面朝近侧延伸。突出部110可被构造成与锁定机构104的一个或多个互补部分接合,以有利于垫102与锁定机构104之间的牢固连接。在一个实施方案中,突出部110可为大致矩形或椭圆形的并且在垫102的面向近侧的表面上方延伸一定距离。在一个实施方案中,垫102可包括围绕开口106的周边间隔开的多个突出部110。可在垫102上形成任何数量的突出部110,使得锁定机构104可与垫102稳定地配对。虽然突出部110被示出为位于开口106的周边周围,但突出部110可放置在垫102上的多种位置中的任一种位置中。本领域的普通技术人员将认识到,可使用其它接合特征部和方法将锁定机构104固定到垫102。接合特征部的非限制性示例包括卡扣机构、锁与钥匙机构、任何各种螺钉或其它螺纹特征部等。
75.垫还可包括各种特征部以辅助或协助使用者。垫可具有成像特征部以有助于在定位期间对垫成像。例如,垫102可包括不透射线标记112以有助于在定位期间进行荧光镜识别。不透射线标记可由成像系统识别,以提供关于垫102的布置的准确反馈。在一个实施方案中,标记112可有助于将接合在垫102或垫102的开口106内的锁定机构定位成与患者的中线相距某个已知距离。垫102可包括导航特征部以有助于对联接到垫的外科进入装置进行
导航。例如,垫可具有反射基准或标记,以有助于对联接的外科进入装置轨线或轴线布置进行外科导航。
76.在一个实施方案中,锁定机构104可通过开口106附接到垫102,使得开口106的一部分和锁定机构104的中心开口对准以形成外科进入稳定装置的中心开口101。在示例性实施方案中,锁定机构104的基座200可连接到垫102,如图6所示。基座200可用作锁定机构104和垫102之间的主要接触部。基座200可包括可与垫开口106的至少一部分对准的开口216。虽然基座200被描绘为具有大致环形状,但应当理解,基座200可具有任何多种形状。基座200和垫102可在外科手术之前预组装为单个单元。另选地,垫102和基座200可被构造为两个单独部件,该两个单独部件可在将垫102粘合到锚定部表面之前或之后在外科手术期间附接。例如,垫102可在期望位置处粘合到锚定部表面。在垫被固定的情况下,基座200的接合特征部可与垫102的接合特征部接合,使得基座200牢固地附接到垫102。
77.以非限制性示例的方式,如图7所示,基座200的接合特征部可被构造为狭槽209。狭槽209可延伸穿过基座200,并且可被构造成接纳垫102的突出部110。可通过将垫的突出部110放置在基座的狭槽209内以在基座和垫之间形成卡扣配合来将基座200牢固地附接到垫102。应当理解,另选的附接机构可用于将基座200固定到垫102。基座200可具有从基座200的外部分向内延伸到开口216的锥形部分218。优选地,锥形部分218所具有的几何结构可与垫102的凹面部分108的几何结构互补。当基座200附接到垫102时,基座200的锥形部分218和垫102的凹面部分108可对准以将基座200安置在垫102内。
78.图8示出了基座200的透视图。平台220可在锥形部分218和外边沿壁222之间形成。外边沿222可从平台220朝近侧延伸,从而围绕基座的外边缘形成环。在一个实施方案中,外边沿222可在与平台220的结合部处从远侧端部到相对的近侧端部渐缩。外边沿222可包括在边沿222的近侧端部处具有上部唇缘的一个或多个延伸节段224,该上部唇缘在平台220之上径向向内延伸,使得在延伸节段224的上部唇缘和平台220的表面之间形成凹槽225。过渡部226可形成在每个延伸节段224的一个端部处。在一个优选的实施方案中,过渡部226可形成在每个延伸节段224的远端处,如沿基座200的周边在顺时针方向上所测量的。过渡部226可为从上部唇缘朝远侧延伸到平台220的实心部分。换句话讲,过渡部226在圆周凹槽225中形成止挡件。过渡部226还可定界延伸节段224和凹陷节段228之间的过渡部。凹陷节段228不具有径向向内延伸超过外边沿222的任何部分。这样,过渡部226可具有从延伸节段224的径向向内位置径向向外偏斜到边沿的内表面处的位置的外边缘。凹陷节段228可在两个延伸节段224之间形成凹陷部或凹坑区域。
79.如从图9中的基座200的顶视图可见,基座200的一个实施方案可包括由三个凹陷节段隔开的三个延伸节段224。优选地,凹陷节段中的一个凹陷节段可为修改的凹陷节段229。突片部分230可被插入基座200中的物体径向向外推压并且在顺时针方向上旋转。一旦移除向外力,突片部分230就可返回到如图9所示的中性位置。突片部分230可由通道232产生,该通道从边沿222的外边缘径向向内延伸,并且沿平台220在圆周方向上继续延伸一定距离。突片部分230可形成为包括止挡件227,该止挡件类似于上述过渡部226,朝远侧延伸到平台220。如下所论述,扣环202可以可旋转地接纳在基座200内,使得扣环可在锁定状态和解锁状态之间旋转。突片230可将扣环固定在锁定位置并且防止扣环不期望地旋转回到解锁状态。识别特征部234可从突片230的一部分延伸,以辅助使用者取向和组装外科进入
稳定装置。例如,识别结构234可从突片部分230的止挡件227朝近侧延伸。在一个实施方案中,为了使扣环从锁定状态返回到解锁状态,使用者可通过识别结构234定位突片230,并且通过向突片230施加力来同时向外推动突片230并将扣环202旋转到解锁位置。
80.现在将描述锁定机构104的另外的示例性特征部。图10是垫102以及将端口10联接到垫的锁定机构104的若干部件的透视图。除基座200之外,图10示出锁定机构104的裙状部204和开口环206。在基座200联接到垫102的情况下,裙状部204可放置在基座200的面向近侧的表面的顶上。如图11和图15最佳所示,裙状部204可优选地具有锥形表面318。表面318可具有与基座200的锥形表面218互补的表面锥度。裙状部204可放置成使得裙状部204的锥形表面318安置在基座200的锥形表面218内。裙状部204的锥形表面318可从裙状部204的外边缘朝向开口316向内延伸。在一个实施方案中,锥形表面318可为大致环形状并且形成裙状部204的主体。应当理解,裙状部204可具有任何多种形状。当裙状部204安置在基座200内时,裙状部204的开口316可与基座200的开口216和垫102的开口106的至少一部分对准。
81.裙状部204可具有从表面318朝近侧延伸以限定开口316的延伸部320。在一个实施方案中,限定开口316的延伸部320的内表面324可为优选地平滑表面,从开口的近侧端部到开口的远侧端部渐缩。如将在下文所描述,平滑锥形表面324可有利于开口环206和接纳在其中的外科进入装置相对于裙状部204的旋转和角移动。延伸部320可包括接合特征部,该接合特征部被构造成与锁定机构104的另一个部分接合,并且优选地与锁定机构104的锁块接合。在一个实施方案中,接合特征部可为形成在延伸部320的外表面上的外部螺纹322。用于将裙状部204接合到锁定机构104的锁块的其它装置也被认为在本发明的范围内。
82.裙状部204可优选地由聚合物或其它柔性材料制成。裙状部204被构造成使得裙状部可根据外科进入稳定装置100所接纳的外科进入装置的平移运动而平移。裙状部204的厚度可优选地略小于形成于基座200和扣环202之间的腔的高度。如将在下文详细地描述,裙状部204的外部分可以可滑动地接纳在腔中,使得裙状部204可沿基座200在任何径向方向上平移。
83.图12示出了开口环206,该开口环可被接纳在裙状部204的开口316内,以有利于通过锁定机构104将外科进入装置联接到垫102。开口环206可具有被构造成接纳外科进入装置的开口416。开口416可由具有外表面402和内表面404的周边壁400限定。在一个实施方案中,外表面402和内表面404可具有不同形状,使得周边壁400具有不均一厚度。以非限制性示例的方式,外表面402可为大致圆形并且内表面404可为椭圆形或蛋形状。在一个优选的实施方案中,内表面可具有对应于要接纳在其中的外科进入装置的形状的周边。开口环206的外表面402可具有弯曲轮廓,而内表面404可具有线性轮廓。外表面402的弯曲轮廓可允许开口环206相对于裙状部开口316更容易地移动。这样,开口环206可相对于裙状部和外科进入稳定装置的纵向轴线a1旋转或成角度。图13示出了裙状部204以及穿过开口环的开口416接纳有端口10的开口环206。如可见,端口具有由开口环206的内表面404的形状反映的蛋形外表面。
84.返回到图12,可形成延伸穿过周边壁400的通道410。通道410可向开口环206提供灵活性,使得开口环可扩展以在开口416内容纳更多数量的外科进入装置。开口环206可具有被构造来有助于接纳在开口416中的外科进入装置10选择性地纵向定位的一个或多个接合特征部。在一个实施方案中,至少一个向内突出的突出部408可形成在内表面404上,以与
形成在外科进入装置的外表面上的互补特征部(诸如多个凹槽18)接合。当外科进入装置向远侧穿过开口416时,开口环接合特征部与形成在外科进入装置的外表面上的互补特征部之间的相互作用可使外科进入装置相对于内环更容易地对准和纵向调整。开口环206与插入的外科进入装置的接合特征部可在两个部件之间提供牢固连接,使得开口环206可根据向外科进入装置施加的力而移动。另外,开口环和外科进入装置的互补接合特征部可向使用者提供关于外科进入装置与内环对准和接合的有益触觉反馈。
85.图14示出了锁定机构的透视图,该锁定机构包括组装基座200、裙状部204、开口环206和扣环202。如图所示,开口环206的开口416可延伸穿过组装后锁定机构的各种部件。图15的剖视图示出了锁定机构104的各种部件可如何相对于彼此进行组装。裙状部204可被放置成使得裙状部的外部分可滑动地接纳在形成于基座200的面向近侧的表面与扣环202之间的腔212中。裙状部204因此可利用由使用者施加的力在腔212内平移。开口环206可放置在由裙状部204的延伸部320限定的开口内。如上所论述,开口环206的外弯曲表面402可由延伸部320的内表面324可旋转地接纳。开口环206因此可在裙状部204的开口316内的整个运动范围内成角度或旋转。
86.现在将参考图15至图19更详细地描述扣环202。图16示出了本发明的扣环的一个实施方案的顶视图。在一个实施方案中,扣环202可具有环形主体500,该环形主体具有边沿504,该边沿具有至少一个径向延伸的突出部502。扣环202可被构造成使得扣环可放置并固定在基座200内。在一个实施方案中,径向延伸的突出部可与基座200的特征部接合,以将扣环固定放置在基座200中。主体500可限定开口516,该开口的至少一部分可与锁定机构的其它部件对准以形成中心贯通开口101。扣环202的尺寸可被设定成使得扣环配合在基座内。此外,扣环主体500可在从基座200的表面移除的距离处径向向内延伸,从而在基座200和主体500之间形成圆周腔212,该圆周腔被构造成可滑动地接纳裙状部204。在一个实施方案中,开口516可为大致圆形的并且形成在扣环202的中心位置处。优选地,开口516所具有的直径可大于基座200的开口216的直径并且大于裙状部204的开口316的直径。
87.主体500可具有由外边沿504、朝近侧延伸部分506和侧向延伸部分510形成的大致阶梯式轮廓。近侧延伸部分506可从边沿504朝近侧延伸。如图15中最佳可见,朝近侧延伸部分506可形成主体500的外圆周环,该外圆周环所具有的径向厚度小于主体500的径向厚度。侧向延伸部分510可从近侧延伸部分508的近侧端部朝向开口516径向向内延伸。具体地,侧向延伸部分510可从近侧延伸部分508的远侧端部升高一定距离,使得在侧向延伸部分510下方从主体500的内径向点径向向外到近侧延伸部分506的面向内的表面形成腔212。
88.换句话讲,主体500可具有实心壁圆周(即,近侧延伸部分508)和悬伸部(即,侧向延伸部分510),该悬伸部并不延伸实心壁圆周的整个远侧长度,而是在扣环202的远侧部分处产生径向空隙。侧向延伸部分510可具有渐缩轮廓,使得侧向延伸部分510的高度沿径向向内方向增加。优选地,侧向延伸部分510的锥部可与基座200的锥形部分218互补。这样,在侧向延伸部分510的面向远侧的表面与基座200的面向近侧的表面(具体地,基座200的锥形部分218的面向近侧的表面)之间形成的径向腔212可沿径向方向保持一致高度。将扣环202放置在基座200内产生径向腔212。锁定机构104的部件的尺寸可被设定成使得裙状部204可滑动地配合在腔212内。
89.侧向延伸部分510的径向向内表面可具有被构造成与锁定机构104的另一个部件
接合的螺纹512。如将在下文详细地描述,螺纹512可优选地与第一锁块208的螺纹接合。应当理解,扣环202和第一锁块208之间的另选的接合机构是可能的,只要第一锁块208可相对于扣环202选择性地绷紧或锁定。
90.参考图17,径向延伸的突出部502从边沿504径向向外延伸并且可被构造成与基座200的凹槽225接合。将扣环202插入基座200内可包括将径向延伸的突出部502与基座200的凹陷部分228对准,使得突出部502与凹槽225对准。一旦插入,就可通过旋转扣环202来将该扣环固定在基座200内,使得径向延伸的突出部502的前缘518邻接基座200的过渡部226的边缘。主侧向延伸部分510的面向近侧的表面可具有至少一个突出部514,以辅助使用者抓持扣环202并将该扣环从面向近侧的表面旋转。这样,突出部502可容放在延伸部分224内。如图18所见,前缘518和过渡部226可具有互补几何结构,使得前缘518与过渡部226配对。在前缘518邻接过渡部226的情况下,基座200的延伸部分224在径向延伸的突出部502之上延伸,从而约束扣环202相对于基座200在纵向方向上的移动。在一个优选实施方案中,基座200的延伸部分224可向内延伸径向距离,使得可在延伸部分224的面向内的表面和主体500的面向外的表面之间形成小间隙240。
91.图19是图18的横截面顶视图,其示出扣环202与基座200接合并旋转,使得突出部502与延伸节段224对准。在此锁定位置中,可看到每个突出部502的前缘518邻接基座200的过渡部226。可在侧向延伸部分510的内表面和基座200之间看到被构造成可滑动地接纳裙状部204的腔212。
92.图20示出了具有锁定机构104的外科进入稳定装置100,该锁定机构具有第一锁块208和第二锁块210。在例示的实施方案中,锁定机构104可包括第一锁块和第二锁块以相对于基底垫选择性地锁定外科进入装置的位置。在一个优选实施方案中,第一锁块和第二锁块(例如,208和210)可为锁环。在其它实施方案中,锁定机构104可包括例如至少一个可释放粘合位点、螺纹锁定旋钮或杠杆作用紧固轮。应当理解,设想本文所公开的锁定部件中的任一个锁定部件单独地或组合使用,以相对于垫选择性地锁定外科进入装置的运动。在示例性实施方案中,如图21的剖视图所示,第一锁块208可为被构造成与扣环202接合以选择性地锁定插入的外科进入装置(诸如端口10)的平移移动的锁环。第二锁块210可为被构造成与裙状部204接合以选择性地锁定插入开口环206内的外科进入装置(诸如端口10)的旋转移动、角移动和平移移动的锁环。
93.图22示出了第一锁块208的实施方案的透视图。优选地,在一个实施方案中,第一锁块可为大致环形,具有壁602和开口608。第一锁块的外径可优选地基本上等于或略小于扣环202的内径。壁602的外表面可具有接合特征部604,该接合特征部被构造成与扣环202的互补接合特征部接合。优选地,接合特征部可为形成在壁602的外表面上的螺纹604。突片606可从壁602的上部部分径向延伸,以有助于旋转或以其他方式移动第一锁块208。在一个实施方案中,突片606的尺寸和形状可设定成有利于使用者抓持突片606并旋转第一锁块208。
94.图21示出了分别与扣环202和裙状部204接合的第一锁块208和第二锁块210的剖视图。还示出基座200和开口环206。第一锁块208可相对于扣环202在第一方向上旋转,以使第一锁块208朝向基座200朝远侧移动。第一锁块208可相对于扣环202在第二方向上旋转,以使第一锁块208远离基座200朝近侧移动。当第一锁块208朝向基座200朝远侧移动时,放
置在腔212内的裙状部204可被夹紧在基座200和第一锁块208之间,使得裙状部204的平移移动受到限制。另一方面,当第一锁块208在第二方向上旋转并且沿扣环202的内圆周远离基座200朝近侧移动时,裙状部204上的压缩力可被释放,从而允许裙状部204相对于基座200在任何径向方向上平移。更具体地,外科医生或使用者可向裙状部204施加力,使得当裙状部204未被第一锁块208夹紧时,裙状部204的外部分可在腔212内移动。在此构型中,裙状部204的运动受到腔212的径向深度和裙状部204的尺寸的限制。
95.图23示出了被构造为由具有中心开口706的壁702形成的锁环的第二锁块210的示例性实施方案。壁702的外表面可被成形为具有弯曲下部部分和锥形上部部分。参考图24,壁702可具有在第二锁块210的内表面704之上形成罩子的径向向内延伸的上部部分708。开口706可由上部部分708的内表面和远侧端部处的内表面704限定在近侧端部处。这样,开口706可在近侧端部处所具有的第一直径可小于开口706在远侧端部处的第二直径。如将在下文详细地描述,开口706的远侧端部中的较大直径开口可允许与第二锁块接合的物体(即,裙状部204的延伸部320)进行径向运动,以选择性地限制接纳在外科进入稳定装置100内的外科进入装置的运动。
96.优选地,内表面704可具有被构造成与裙状部204的互补接合特征部接合的接合特征部712。在一个实施方案中,第二锁块可具有沿内表面704形成的内部螺纹712,该内部螺纹被构造成与裙边延伸部320的外部表面上的螺纹322接合。第二锁块210可相对于裙状部204在第一方向上旋转,使得第二锁块210相对于裙状部204朝远侧移动。第二锁块210可相对于裙状部204在第二方向上旋转,使得第二锁块210相对于裙状部204朝近侧移动。突片710可从壁702的外表面朝近侧延伸。类似于第一锁块的突片606,突片710可有助于使用者旋转或移动第二锁块210。优选地,突片710的尺寸和形状可被设定成有利于使用者抓持突片710。
97.图25示出了与裙状部204接合的第二锁块210的一个实施方案的剖视图。如可见,第二锁块210的内部螺纹712可与裙状部204的延伸部320的外部螺纹322接合。当第二锁块210在第一方向上旋转,从而致使第二锁块210相对于裙状部204在远侧方向上移动时,第二锁块210可在径向向内方向上施加压缩力,使得裙状部204的延伸部320被径向向内推压。另一方面,当第二锁块210在第二方向上旋转时,第二锁块相对于裙状部朝近侧移动,从而减小由第二锁块施加在裙状部204上的任何向内压缩力。这样,当外科进入装置被接纳在由裙状部204形成的开口内时,第二锁块可通过选择性地在裙状部延伸部320上施加和移除向内压缩力来选择性地限制外科进入装置和裙状部之间的移动。如从图25可见,限定裙状部204的开口的锥形内表面324渐缩,使得径向向内压缩力可致使锥形表面324的上部部分朝向更线性轮廓径向向内移动,并且抵靠在其中接纳器械或物体的外表面邻接。在示例性实施方案中,并且返回参考图21,开口环206可保持在锥形表面324内以接纳外科进入装置。由第二锁块210施予在裙状部延伸部320上的径向压缩力可致使延伸部320抵靠开口环206向内压缩。这种向内压缩可限制开口环206相对于裙状部204的运动,并且因此约束所接纳外科进入装置的运动。
98.图26示出了本发明的外科进入稳定装置100的第一示例性外科应用。图26示出了与接纳在其中的端口10完全组装在一起的外科稳定装置100。垫102的面向远侧的表面粘合到患者的皮肤。在此实施方案中,垫102形成为具有大致椭圆形或蛋形的完整贴片。
99.图27示出了外科进入稳定装置100的示例性使用方法的一部分。在图27中,垫102被示出在一定位置处附接到锚定部表面(例如,患者的皮肤),使得外科切口120位于垫102的开口106内。基座200被示出固定到垫102。在一个实施方案中,垫102可作为独立部件附接到锚定部表面。一旦附接,基座200然后就可由使用者固定到垫102的面向近侧的表面上。例如,外科医生可首先针对特定外科应用将垫102选择、切割或以其他方式操纵至期望形状和尺寸。接着,可将垫102的面向粘合剂远侧的侧面放置在患者皮肤上的期望位置处。在垫牢固地附接的情况下,基座200可朝远侧移动到垫102上,并且可通过使基座和垫的互补接合特征部接合来固定到垫102。例如,基座200的狭槽209可与垫102的突出部110对准。然后,基座可用卡扣配合固定到垫102。
100.另选地,基座200可在将垫102粘合到锚定部表面之前固定到垫102。在一个实施方案中,可将垫和基座预组装为单个一体式部件以供在外科手术中使用。另选地,垫和基座可被构造为在外科手术之前被附接的两个单独部件。这样,垫和基座可在外科手术期间作为单个组装单元放置。
101.如图27所示,在垫102固定到接合表面并且基座200附接到垫102的情况下,外科医生使用穿过切口120插入的器械15操纵组织(例如,导航到手术部位、扩张切口120等)。应当理解,切口120可在垫102被固定到锚定部表面之前或之后形成。另外,切口120可在垫102已固定到接合表面之前或之后并且在基座200已附接到垫102之前或之后被扩张以容纳多个器械。一旦切口已被扩张以容纳外科进入装置(例如端口10),就可穿过切口插入端口。同样,外科进入装置的插入可在垫102已固定到接合表面之前或之后发生,并且可在基座200或锁定机构104的任何其它部件已附接之前或之后发生。
102.在一个示例性方法中,切口120可在患者上的期望位置处形成。然后可通过将垫102的粘合剂远侧表面抵靠皮肤表面放置来将垫102固定到患者的皮肤,该垫的尺寸和形状先前被设定成满足特定外科手术或应用的要求。在其它实施方案中,标准尺寸和形状的垫可在手术中切割或以其他方式操纵以满足特定外科手术或应用的要求。垫102可与附接到其的基座200预组装。另选地,一旦垫102被固定到患者的皮肤,基座200就可附接到垫102。在一个优选的实施方案中,可对准垫102,使得切口120居中地位于垫102的开口106内。在垫和基座环绕切口120的情况下,可制备切口120以接纳端口10。例如,可使用一组扩张管来扩张切口120以实现期望的切口开口。另选地,可使用本领域已知的其它方法制备切口120以用于接纳外科进入装置。然后可使用常见的外科技术将端口10插入切口120中。
103.在插入端口10并且基座200固定在垫102上的情况下,可将锁定机构104放置在基座200中。锁定机构104可由扣环202、裙状部204、开口环206、被构造成与扣环202接合的第一锁块208以及被构造成与裙状部204接合的第二锁块210组成。端口10可定位在开口环206的开口416处,并且锁定机构104可沿端口10向远侧移动,直到锁定机构104的面向远侧的表面接触基座200的面向近侧的表面。在一个实施方案中,裙状部204的面向远侧的表面可接触基座200的面向近侧的表面,并且扣环202可在解锁位置与基座200对准。为了固定锁定机构104,扣环202可从解锁位置旋转到锁定位置。在解锁位置,扣环的径向延伸突出部502可与基座的凹陷节段228对准,如上所述。然后,扣环202可在第一方向上旋转,使得突出部502旋转成与基座延伸节段224的过渡部226接合。基座200的突片部分530可由扣环突出部502径向向外推动,并且可在突出部502完全进入延伸节段224时保持在向外位置。扣环202和基
座200可被构造成使得在锁定位置,即当突出部502的前缘与过渡部226接合时,突出部502跳过突片部分230,使得突片230不再被径向向外推压并且可返回到其中性构型。这样,突片部分230可充当固定机构,以防止扣环202在外科应用期间从锁定位置旋转出去,因为突片230和过渡部226在锁定位置被放置在突出部502的任一端部处。用户可抓持特征部514以有利于扣环相对于基座平滑且容易地旋转。虽然在插入端口之后结合各种部件(诸如锁定机构104)的组装提供了以上描述,但应当理解,在一些实施方案中,端口可在已经组装的锁定机构处于解锁构型时通过它插入。
104.在锁定机构104放置在基座内并且端口10延伸穿过其的情况下,端口10可被调整至期望的轨线、取向和位置。可在多个自由度上相对于垫102调整端口10。例如,可相对于垫102在任何径向方向上平移端口10。在一个实施方案中,外科医生可通过抓持和移动端口10的近侧部分或附接到其的柄部来将平移力施加到端口10的近侧部分。裙状部204可根据施加至端口10的平移力而移动。裙状部204可在基座200和扣环202之间的腔212内平移或滑动。在实现端口10的期望定位之后,第一锁块208可在第一方向上旋转以将裙状部204夹紧在腔212内的期望位置处,从而在径向方向上限制裙状部并因此附接端口10的进一步平移移动。在第二方向上旋转第一锁块208可使第一锁块从基座朝近侧移动,并且因此释放所夹紧裙状部204,从而允许裙状部并且因此附接端口10平移移动。
105.端口10还可相对于垫102成角度、旋转或纵向平移。例如,端口10可通过抓持端口10的近侧部分并且旋转端口而旋转360度。具有圆的外边缘402的开口环206可在裙状部204的开口316的锥形内表面324内旋转360度。此外,可通过抓持端口10的近侧部分并且使端口相对于垫102成角度来使端口10成角度至多种期望取向。同样,开口环206的圆的外边缘402可相对于裙状部204的开口316的锥形内表面324成角度。
106.还可通过在近侧方向上或远侧方向上向端口10的近侧端部施加力,使得相对于垫102在近侧方向上或远侧方向上平移端口10来相对于垫102在纵向方向上平移端口10。一旦实现端口10相对于垫102的期望取向和定位,就可在第一方向上旋转第二锁块以限制进一步旋转移动、角移动或平移移动。在一个实施方案中,当第二锁块在第一方向上旋转时,第二锁块朝远侧移动并且向裙状部延伸部320施加向内压缩力。当裙状部延伸部320被径向向内压缩时,裙状部延伸部被压缩到其中放置有端口10的开口环206上。在使第二锁块旋转第一量之后,由第二锁块施加的压缩力在纵向方向上限制端口的平移移动。在将第二锁块进一步旋转到第二量之后,由第二锁块施加的压缩力可通过限制内环206相对于裙状部204的内延伸部320的旋转的能力来相对于垫约束端口的旋转移动。在将第二锁块进一步旋转到第三量时,由第二锁块施加的压缩力可通过限制开口环206相对于裙状部204的延伸部320成角度的能力来相对于垫约束端口的角移动。在第二方向上旋转第二锁块使第二锁定机构相对于裙状部304的内延伸部320朝近侧移动,并且减小裙状部204上并且因此开口环206和接纳在其中的端口10上的向内压缩力。当第二锁块在第二方向上旋转时,可相对于垫102移动端口10。这样,第二锁块可用于相对于垫选择性地限制端口的平移移动、旋转移动和角移动。锁定机构104可在外科手术期间解锁以允许调整端口10,并且如果需要,重新锁定以将端口固定在不同的位置或轨线中。
107.在端口10建立并稳定在期望位置和轨线处的情况下,各种器械、植入物等可经由皮肤穿过端口10到达手术部位。例如,如图28所示,外科进入装置可为用于进入位于脊柱区
域32处的手术部位的端口管30。器械34可穿过端口管30插入。器械34可为任何种类的器械,诸如相机或植入物。在一个实施方案中,端口管30可为15mm的刚性端口,该刚性端口的尺寸被设定成容纳多种物体,包括例如较大植入物。端口管30的内腔的尺寸可被设定成有利于插入具有各种形状的多种器械、植入物等。因此,非圆形内管腔几何结构可为优选的。
108.图29示出了被构造成接纳软网端口40的外科进入稳定装置100的示例性应用。在图29的实施方案中,锁定机构104可适于通过包括顶盖构件44以固定和选择性地闭合外科进入装置的开口来接纳挠性端口或其它外科进入装置。顶盖构件44可从外科进入装置的近侧端部移除,使得器械、植入物等可经由皮肤传递到手术部位42。在一些手术中,可能期望使用挠曲端口以最小化对周围组织的创伤。在一个实施方案中,挠曲端口可为5mm柔性端口,该挠曲端口的尺寸和构造被设置成接纳除其它之外可视化器械、光学套管针和中等尺寸植入物。在另一个实施方案中,挠曲端口可为4mm挠曲端口,该挠曲端口的尺寸和构造被设置成接纳除其它之外较小扩展植入物、光学套管针和可视化器械。
109.可对上述方法和装置作出变型并且这些变型被认为在本发明的范围内。例如,在将端口10插入切口120中之前,可将锁定机构104放置在基座200中并且固定在其中。在此类实施方案中,可通过将端口朝远侧移动穿过外科进入装置的中心开口101来将端口10插入切口120中。以另一个示例的方式,第一锁块和第二锁块可采取除锁环之外的形式,并且可通过操作第一锁定机构和第二锁定机构,而不是旋转的手段来实现相对于垫选择性地锁定端口。以非限制性示例的方式,本发明的锁定机构可包括任何数量的可移除粘合剂调整部位、螺纹锁定旋钮或杠杆作用紧固轮。此外,如上所述,锁定机构104不需要具有单独的第一锁块和第二锁块。在一个实施方案中,单个锁块可用于相对于垫102选择性地限制端口10的移动。无论所使用的构型如何,锁定机构104被构造成相对于垫联接并选择性地锁定外科进入装置。
110.在本发明的外科进入稳定装置中,基底垫可根据应用区域的几何结构或使用者的需要而具有多种形状和尺寸。在外科应用中,垫的特定形状和尺寸可取决于多种因素,包括患者的尺寸、手术部位的位置、切口的尺寸、待治疗的区域的尺寸、外科医生完成手术所需的运动范围等。图30示出了外科进入稳定装置1000的一个实施方案,该外科进入稳定装置包括垫1002和放置在垫1002的中心部分(未示出)上的锁定机构1014。垫1002可具有从中心部分延伸的至少一个径向指状物1004。导航标记1008可包括在至少一个径向指状物1004中的一个径向指状物上。在所示出的实施方案中,垫1002具有8个径向指状物1004。每个径向指状物1004的尺寸和形状可根据需要或根据特定应用所需来设定。
111.在图31所示的另一个示例性实施方案中,外科进入装置1020可包括由具有面向远侧的粘合剂表面的薄聚合物形成的垫1022。在一个实施方案中,薄聚合物垫可为橡胶、氯丁橡胶、ptfe等。垫1022可具有介于约1mm和约5mm之间的厚度,并且在一些实施方案中,介于约1.5mm和约3.5mm之间的厚度。在图31所示的实施方案中,锁定机构1024的至少一部分可放置在锚定部表面(即,患者的皮肤)和垫1022的面向远侧的粘合剂表面之间。例如,锁定机构1024的基座1026可被放置成使得基座1026的远侧表面与锚定部表面接触。然后可将垫1022放置在锚定部表面和基座1026之上,使得基座1026通过垫1022保持固定到锚定部表面。锁定机构1024可以如上所述的方式附接到基座1026。
112.图32示出了本发明的外科稳定装置1030的又一个示例性实施方案。外科进入稳定
装置1030包括被构造为具有大致矩形形状的完整贴片的垫1032。锁定机构1034被示出在垫1032的中心位置处。另选地,锁定机构1034可被接纳在垫1032上的任何位置处。垫1032可包括导航标记,诸如标记1036,以有助于垫1032相对于外科或解剖结构对准和放置。
113.图33和图34示出了本发明的外科进入稳定装置的第二示例性实施方案。如图33所示,外科进入稳定装置1100可包括被构造成接纳外科进入装置(例如,端口1110)的垫1102。锁定机构可将端口1110联接到垫1102并且选择性地锁定其间的移动。垫1102可具有被构造成接触锚定部表面的面向远侧的粘合剂表面。在一个优选的实施方案中,垫1102的面向远侧的粘合剂表面可包括接触患者皮肤的医用级粘合剂接触层。
114.垫1102可具有被构造成接纳外科进入装置的开口1106。在一个优选的实施方案中,开口1106可为沿垫1102延伸的细长狭槽。例如,参考图34,垫1102可具有沿垫的纵向轴线延伸的开口1106。在一个实施方案中,垫1102可为大致矩形形状。如图34所示,开口1106可所具有的形状与垫1102的形状类似或互补。另选地,开口1106所具有的形状可与垫1102的形状不同。本领域的普通技术人员将会知道,垫1102和开口1106可具有多种形状中的任一种形状。
115.细长狭槽开口1106可有利地有利于在外科手术期间在横向平面中调整外科进入装置。此类调整允许对外科进入装置的测角进行粗略改变。例如,在脊柱外科应用中,可能期望在横向方向上移动外科进入装置。因此,垫1102可被放置成使得细长开口1106在横向平面中延伸(例如,近中和侧向延伸)。这样,可调整端口以允许对测角进行粗略改变。例如,端口可被放置成25度tlif进入或45度kambin进入脊柱手术部位。
116.基座1108可被构造成穿过基座的中心开口接纳端口1110。另选地,基座1108可与端口1110一体地形成为从端口1110的近侧端部延伸的凸缘的形式。进一步地,基座1108可为单个部件,例如如图33所示,或者基座1108可为多个部件。例如,基座1108可被构造成类似于上述裙状部104,并且开口环类似于上述内开口环106以接收端口1110。
117.锁定机构可被构造成相对于垫1102选择性地限制端口1110的移动。在一个实施方案中,锁定机构1104可为可移除粘合剂。以非限制性示例的方式,锁定机构可为钩
‑
眼闭合件。例如,钩
‑
眼闭合件的一侧可放置在垫1102的面向近侧的表面上,靠近开口1106的至少一部分。钩
‑
眼闭合件的对应侧可放置在基部1108的面向远侧的表面上。这样,基座1108可通过接合钩
‑
眼闭合件的两个对应部分来可移除地固定到垫1102。具有插入端口1110的基座1108可根据需要在沿开口1106的多个位置处可重复地放置和移除。应当理解,可以类似方式使用任何其它形式的可移除粘合剂。
118.在一些实施方案中,至少一个附加锁块1112可用于进一步相对于垫1102选择性地限制端口1110的运动。在一个实施方案中,锁块1112可为具有外部螺纹1114的锁环,该外部螺纹被构造成与基座1108的内表面上的对应螺纹接合。抓持件1116可从锁块1112朝近侧延伸以辅助使用者旋转锁块,从而相对于垫1102选择性地限制端口的旋转移动、角移动和纵向平移移动。应当理解,锁块1112可被构造成类似于如本文先前所述的第一锁块和第二锁块中的一者。
119.图34示出了第二实施方案的外科进入稳定装置的示例性定位。垫1102可被放置成使得垫1102沿患者的横向轴线侧向延伸。在涉及脊柱手术部位的一种应用中,可将垫1102侧向放置在患者的腰区中。开口1106可沿垫1102侧向延伸,使得其中接纳有端口的基座
1108可选择性地沿横向平面移动和调整。这样,外科医生可在外科手术期间实现端口测角的粗略改变,而无需移除稳定装置或产生另外的切口。
120.根据本发明的外科进入稳定装置的另一个示例性实施方案在图35和图36中示出。在一些应用中,可能不期望将粘合垫放置在外科部位或用于进入该手术部位的切口附近。对于这种情况,本发明的外科进入稳定装置可用于将外科进入装置联接到远程定位的基底垫,以将外科进入装置放置在远离垫一定距离的位置处。
121.外科进入稳定装置1200可具有连接机构1204,该连接机构被构造成将外科进入装置(例如,端口1210)连接到垫1202。在一个实施方案中,连接机构1204可包括具有连接器1208和附接部件1214的臂1206。附接部件1214可具有中心开口以接纳外科进入装置1210。连接器1208可位于臂1206的第一端部处并且可被构造成接合附接部件1214的一部分。臂1206的第二端部可附接到垫1202,使得臂1206将外科进入装置联接到垫。
122.如图36所示,垫1202可类似于上述垫。在一个实施方案中,垫1202可为具有面向远侧的粘合剂表面的可扩展柔性垫。垫1202可具有被构造成与连接机构1204的一部分耦接的附接部分1212,如将在下文所述。垫1202和臂1206可一体地形成为一个部件,或者可被构造成经由一个或多个连接特征部连接。在一个实施方案中,开口1216可形成于附接部分1212中并且可被构造成接纳臂1206的紧固件1218。应当理解,垫1202和开口1216可根据特定应用所需而采用任何多种形状和尺寸。垫1202可以任何数量的已知联接方法联接到臂1206。在一个实施方案中,如图36所示,紧固件1218可为带螺纹螺钉紧固件。紧固件1218可放置在开口1216内并且使用紧固件1218的螺钉特征部接合在其中。另选的紧固件的非限制性示例包括卡扣机构、互补公部件和母部件过盈配合、螺钉、螺纹紧固件等。
123.臂1206可由延展性材料制成,使得臂可弯曲以调整第一端部相对于第二端部的定位。这样,可通过将臂弯曲成期望构型来将连接到臂的第一端部的外科进入装置相对于联接到臂的第二端部的垫放置在期望位置。在一个实施方案中,连接器1208可位于臂1206的第一端部上以与附接件1214接合,以便将端口1210联接到臂的第一端部。连接器1208可通过本领域中已知的任何连接手段接合附接件1214。例如,在一个实施方案中,连接器1208可为球窝接头连接器并且可将附接件1214的延伸部接纳在球窝接头连接器的凹陷部内以将附接件1214固定到臂1206。
124.柄部1220可与端口1210相关联并且有助于端口的移动,例如旋转移动。在一个实施方案中,端口1210可穿过柄部1220中的开口插入。柄部可具有从开口径向向外延伸的抓持部分1222。抓持件1222可包括有利于端口1210的旋转移动的特征部。例如,抓持件可具有用于器械的狭槽或用于用户抓持的突片。抓持件的旋转运动可转换成插入端口的附带的旋转运动。
125.图37和图38示出了端口一旦使用本发明的外科进入稳定装置放置在稳定位置时的示例性用途。虽然图37和图38示出了具有连接到端口的可弯曲臂的实施方案的外科进入稳定装置,但应当理解,本文所述的实施方案中的任一个实施方案可用于稳定端口。图37和图38示出了端口可用于将多种器械、植入物或物体中的任一种经由皮肤通过稳定端口传递到目标手术部位。例如,如图37所示,端口1310可由外科进入稳定装置1300固定。在端口1310稳定的情况下,具有导航阵列1350的细长工具或其它器械可穿过端口1310经由皮肤插入到目标部位。以另一个非限制性示例的方式,图38示出了由外科进入稳定装置1400固定
的端口1410。在端口1410被固定的情况下,保护网1450可穿过端口插入到目标部位以减少对周围组织的创伤。然后可使另外的器械(诸如针1460)或其它物体经由皮肤穿过端口1410和网1450。
126.在上述方法和装置的另一种可能变型中,外科进入装置可具有附接到外科进入装置的近侧部分的垫,使得垫可被展开以粘合到锚定部表面。在一个实施方案中,如图39所示,外科进入装置端口1510可在端口的近侧端部1512处附接有粘合垫1520。粘合垫1520可附接到端口的近侧部分1512,使得在端口插入患者的切口内之后,垫可从端口的近侧部分展开以粘合到锚定部表面,例如患者的皮肤。粘合垫1520可为上述垫中的任一种。例如,在一个实施方案中,垫1520可为在垫的展开状态下可覆盖整个无菌消毒盖布开口的连续垫。在其它实施方案中,粘合垫可包括可布置成展开状态或非展开状态的一个或多个延伸部、指状物或拴系件。
127.在非展开状态或插入状态下,粘合垫可以紧凑的方式布置,并且可在穿过切口插入端口时附接或固定到端口的近侧部分。另选地,在端口已插入切口内之后,垫可在非展开状态下附接或固定到端口的近侧部分。例如,在将端口插入切口内之前或之后,可在非展开状态下将垫卡扣到端口的近侧部分上。然后可展开垫,使得垫的面向远侧的粘合剂表面可粘合到锚定部表面。在一个实施方案中,可通过朝向锚定部表面朝远侧卷动或移动垫或垫的一部分来展开垫。另选地,垫和端口之间的接合机构可被释放,使得垫或垫的一部分不再固定到端口,并且可由外科医生操纵以将垫的面向远侧的粘合剂侧固定到锚定部表面。以非限制性示例的方式,接合机构可为卡扣、螺钉、杠杆、张紧构件或如本领域已知的其它接合机构。
128.图40至图42示出了本发明的外科进入稳定装置的柄部1600的另一个实施方案。例如,图40至图42的柄部可与外科进入装置相关联,类似于如何结合图35至图36的端口1210示出和描述柄部1220。柄部1600可包括具有延伸部1620和杠杆1630的主体部分1610。在一个实施方案中,延伸部1620可为大致圆柱形的并且从柄部的主体1610朝远侧延伸。延伸部1620可限定通孔1640,外科进入装置(例如像端口)可穿过该通孔插入。应当理解,通孔1640可具有多种几何结构中的任一种几何结构,使得期望外科进入装置可从中穿过。如在图42中最佳可见,柄部1600可包括锁定部分1650,该锁定部分可与外科进入装置的特征部接合,以选择性地保持外科进入装置与柄部1600之间的相对定位。在一个实施方案中,锁定部分1650可为具有一个或多个齿状物1652的拉链系带或棘轮/棘爪式卡扣杠杆,这些齿状物可与外科进入装置的外表面上的特征部接合。例如,在一个实施方案中,当外科进入装置设置在通孔1640内时,锁定部分1650的一个或多个齿状物1652可选择性地与形成于外科进入装置的外表面上的一个或多个凹槽接合。在一些实施方案中,锁定部分1650可包括被偏置成与外科进入装置接合而无需用户交互的突片或杠杆。而且,在一些实施方案中,一个或多个齿状物1652可被构造成允许在第一方向上移动,同时防止在第二方向上移动(例如,允许外科进入装置穿过通孔1640向远侧推进,同时防止近侧回缩)。
129.图41示出了图40的与主体1610分离的杠杆1630。杠杆1630可选择性地接合锁定部分1650,以使锁定部分移动成不与柄部1600的通孔1640内的外科进入装置接合,从而充当释放件以允许相对于柄部调整外科进入装置。在一个实施方案中,杠杆1630可为具有从其面向远侧的表面延伸的至少一个接合特征部的大致平面元件。在图41所示的实施方案中,
第一柱1632可从第一平面部分1636的面向远侧的表面延伸,并且可被接纳在主体1610中的狭槽1612内。第二柱1634可从第二平面部分1638的面向远侧的表面延伸,并且可被接纳在主体中的狭槽1614内。为了将杠杆1630插入主体1610中,杠杆接合特征部诸如柱1632、1634可移动到主体接收特征部诸如狭槽1612和孔1614中。在一个实施方案中,杠杆的接合特征部可卡扣到主体的接纳特征部中。主体的狭槽1612可具有第一端部1616和第二端部1618。狭槽1612的第一端部1616可与狭槽的第二端部1618相比位于更靠近于主体1610的边缘。换句话讲,狭槽1612可从靠近于主体1610的边缘的位置朝向主体的中心侧向向内延伸。应当理解,虽然图41所示的柄部1600的实施方案具有两个接合特征部和对应的接纳特征部,但柄部的杠杆和主体可具有任何数量的接合特征部和接纳特征部。
130.在例如在图40中所示杠杆1630插入主体1610中的情况下,使用者可接合杠杆,使得杠杆移动锁定部分1650以选择性地接合设置在通孔1640中的外科进入装置。例如,可向杠杆1630施加力,使得第一柱1632在狭槽1612内平移。杠杆的第二柱1634可保持固定在主体的孔1614内,使得杠杆可在第一柱1632在主体1610中的狭槽1612内平移时绕第二柱枢转。在一个实施方案中,使用者可通过在向内方向上(即,朝向主体1610的中心线)向杠杆的第一平面部分1636施加力来压下杠杆,从而致使第一柱1632在狭槽1612内平移并且使杠杆绕第二柱1634枢转。在压下杠杆的情况下,杠杆的第二平面部分1638可接合主体1610的锁定部分1650以使锁定部分偏转到一个或多个齿1652与形成于设置在通孔1640中的外科进入装置上的一个或多个凹槽脱离的位置。在一个实施方案中,当使用者释放上述力时,杠杆1630可返回到图40所示的位置。即,杠杆1630可绕柱1634枢转,使得第一平面部分1636径向向外移动。这种移动允许锁定部分1650移动回到一个或多个齿状物1652与形成于设置在通孔1640中的外科进入装置上的一个或多个凹槽或其它特征部接合的位置(例如,经由偏置力等)。
131.应当理解,图40至图42的柄部1600及其各种部件可在本发明的范围内以多种不同方式与端口相关联。例如,拉链系带或棘轮/棘爪式卡扣杠杆可用作本发明的锁定机构的部件来代替开口环,以选择性地限制外科进入装置的轴向运动。以另一个示例的方式,柄部1600可用于本文所述的各种实施方案中的任一种实施方案。此外,杠杆的接合特征部和主体的接收特征部可形成为任何互补特征部,使得杠杆可联接到柄部的主体并且可在打开位置和闭合位置之间移动,在该打开位置中柄部的锁定部分未被接合,在该闭合位置中柄部的锁定部分被接合。
132.上述示例性实施方案描述了脊柱外科应用。虽然这是一个设想用途,但本发明的方法和装置可同样适用于患者身体的其它区域。因此,本文所述的装置可形成为适用于患者身体的各种区域的各种尺寸和材料。
133.基于上述实施方案,本领域技术人员将理解另外的特征和优点。因此,本公开不受已具体示出和描述的内容的限制。本文引用的所有出版物和参考文献全文明确地以引用方式并入本文。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。