1.本发明属于农业机械设备技术领域,特别是一种生姜收获装备。
背景技术:
2.生姜具有较高的食用与药用价值,在我国多地都有种植;目前,生姜种植早期的起垄等工序的机械化程度虽在逐步上升,但其后期的下种、收获等工序仍以人工劳作的方式进行,极大地妨碍了生姜产业的发展速度。
3.为提高生姜采收效率,中国实用新型专利“生姜收获机”(申请号:cn200520083134.,公开日:20050511)公开了一种生姜采收装置,包括发动机1的动力输出轴通过v型皮带2连接变速箱3;变速箱3上分两路动力输出,一路通过滚子链4与驱动轮6连接,另一路通过滚子链7与锥齿轮8啮合;发动机1、变速箱3、立轴9安装在机架15上;锥齿轮8和夹持带主动轮10安装在立轴9上;夹持带11安装在夹持带主动轮10和夹持带被动轮12上;拨禾轮13安装在夹持带被动轮12上;滚子链4、驱动轮6和分禾器14安装在三角形支架5上;机架15安装在左右两个三角形支架5上。
4.因此,现有技术存在的问题是:生姜收获装置功能不够完善,自动化程度低,缺乏相应的扶禾、抖土、收集功能;无法适应不同高度的地表,无法对不同深度的生姜进行挖掘;果实收获率低,其直接利用拔禾轮进行拔禾,会使姜苗的茎断裂,从而导致收获失败,且无法对倒伏的姜苗进行收获;姜土分离率低,仅利用夹持带实现抖土功能,收获的生姜不够清洁。
技术实现要素:
5.本发明的目的在于提供一种生姜收获装备,功能完善、适应性强、收获率高。
6.实现本发明目的的技术解决方案为:
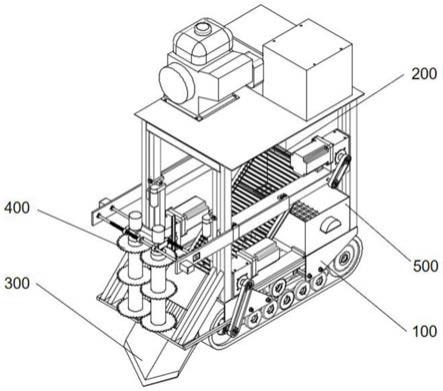
7.一种生姜收获装备,包括用于驱动所述生姜收获装备的移动平台100、用于姜土分离和运输姜块的运输分离模块200、用于姜块挖掘的挖掘模块300、用于切割茎秆的茎秆切除模块400和用于姜块收集的收集模块500;所述运输分离模块200置于移动平台100上,挖掘模块300置于运输分离模块200前端,茎秆切除模块400置于挖掘模块300前端上部,收集模块500置于运输分离模块200后端下部。本发明与现有技术相比,其显著优点为:
8.1、功能完善,自动化程度高:本发明拥有一整套的行走、切茎、挖掘、抖土、收集功能,无需人工参与,自动化程度高;
9.2、适应性强:茎秆切割器可对不同位置的茎秆进行水平位置上的调整,以达到最好的切茎效果;挖掘铲的深度、高度可调,可对不同深度的生姜进行挖掘;
10.3、收获过程简洁:本发明先利用茎秆切割器切除茎秆,再利用挖掘铲进行挖掘并进行收获。
11.4、姜土分离率高:利用运输分离模块中的运输带、收集模块中的收集箱以及挖掘部件的挖掘铲镂空部分多次进行姜土分离,以实现姜块的清洁。
12.下面结合附图和具体实施方式对本发明作进一步的详细描述。
附图说明
13.图1是本发明生姜收获装备的结构示意图。
14.图2为图1中运输分离模块的结构示意图。
15.图3为图1中挖掘模块的结构示意图。
16.图4为图1中茎秆切除模块的结构示意图。
17.图5为图1中收集模块的结构示意图。
18.图中:移动平台100、运输分离模块200、挖掘模块300、茎秆切除模块400、收集模块500、上安装架201、下安装架202、减速器203、输送机构驱动电机204、第一传动轴205、传动带轮206、传动皮带207、第一输送带轮208、第二传动轴209、第二输送带轮210、输送带211、电动推杆301、电动推杆支座302、第一导轨303、第一滑块304、铲夹305、铲尾306、铲头307、第二导轨308、第二滑块309、弹簧310、茎秆切割器下悬挂臂401、茎秆切割器上悬挂臂402、丝杠403、丝杠驱动电机404、丝杠架405、茎秆切割器406、锁紧机构407、茎秆切割器驱动电机408、收集箱501、箱挡502。
具体实施方式
19.如图1所示,本发明生姜收获装备,包括用于驱动所述生姜收获装备的移动平台100、用于姜土分离和运输姜块的运输分离模块200、用于姜块挖掘的挖掘模块300、用于切割茎秆的茎秆切除模块400和用于姜块收集的收集模块500;
20.所述运输分离模块200置于移动平台100上,挖掘模块300置于运输分离模块200前端,茎秆切除模块400置于挖掘模块300前端上部,收集模块500置于运输分离模块200后端下部。
21.如图2所示,所述运输分离模块200包括上安装架201、下安装架202、减速器203、输送机构驱动电机204、第一传动轴205、传动带轮206、传动皮带207、第一输送带轮208、第二传动轴209、第二输送带轮210、输送带211;
22.所述上安装架201安装在移动平台100的中部水平支架后部,所述下安装架202安装在移动平台100的下底板前部,所述减速器203通过螺栓固定在移动平台100右侧中部水平支架上,所述输送机构驱动电机204通过螺栓固定在减速器203上,所述第一传动轴205通过轴承安装在上安装架201上,所述传动带轮206分别连接在减速器203和第一传动轴205上,并通过传动皮带207相连接,所述第一输送带轮208连接在第一传动轴205上,所述第二传动轴209通过轴承安装在下安装架202上,所述第二输送带轮210连接在第二传动轴209上,并通过输送带211与第一输送带轮208相连接;
23.所述传动带轮206、第一输送带轮208和第二输送带轮210数量为2个,所述传动带轮206分别安装在减速器203输出轴末端和第一传动轴205输入端,所述第一输送带轮208分别安装在第一传动轴205的两端,所述第二输送带轮210分别安装在第二传动轴209的两端。
24.利用输送带的缝隙可对姜土混合物进行分离,以实现姜块的清洁;输送带的三角棱柱挡条可防止生姜在运输过程中因振动而滑落;利用运输分离模块将挖掘出的姜块运输到收集模块。
25.如图3所示,所述挖掘模块300包括电动推杆301、电动推杆支座302、第一导轨303、第一滑块304、铲夹305、铲尾306、铲头307、第二导轨308、第二滑块309、弹簧310;
26.所述电动推杆301通过螺栓固定在电动推杆支座302上,所述电动推杆支座302通过螺栓固定在移动平台100前部竖直支架上,所述第一导轨303通过螺栓固定在移动平台100内侧挡板上,所述第一滑块(304)通过螺栓与铲夹(305)固定连接,并和第一导轨(303)滑动连接,所述铲夹305通过焊接固定在铲尾306上,并通过销轴与电动推杆301铰接,所述铲头307通过螺栓固定在铲尾306上,所述第二导轨308通过螺栓固定在在移动平台100内侧挡板上,所述第二滑块309通过螺栓与铲尾306固定连接,并和第二导轨308滑动连接,所述弹簧310连接第二导轨308和第二滑块309;
27.所述电动推杆301、电动推杆支座302、第一导轨303、第一滑块304、铲夹305、第二导轨308、第二滑块309、弹簧310的数量为2个,所述电动推杆301分别安装在电动推杆支座302上,所述电动推杆支座302分别通过螺栓固定在移动平台100前部两侧竖直支架上,所述第一导轨303分别固定在移动平台100两边内侧挡板上,所述第一滑块304分别安装在两侧第一导轨303上,并可在第一导轨303上自由滑动,所述铲夹305分别安装在铲尾306两侧,所述第二导轨308分别固定在移动平台100两边内侧挡板上,所述第二滑块309分别安装在两侧第二导轨308上,并可在第二导轨308上自由滑动,弹簧310分别安装在两侧第二导轨308底部。
28.挖掘铲的入土深度可调,可对不同深度的生姜进行挖掘;非工作状态下可移出土壤,方便正常移动。
29.如图4所示,所述茎秆切除模块400包括茎秆切割器下悬挂臂401、茎秆切割器上悬挂臂402、丝杠403、丝杠驱动电机404、丝杠架405、茎秆切割器406、锁紧机构407、茎秆切割器驱动电机408;
30.所述茎秆切割器下悬挂臂401通过焊接固定在移动平台100前端侧挡板上,所述茎秆切割器上悬挂臂402通过螺栓固定在移动平台100中部水平支架上,所述丝杠403通过轴承安装在茎秆切割器上悬挂臂402上,所述丝杠驱动电机404安装在茎秆切割器上悬挂臂402两侧电机箱内,所述丝杠架405安装在丝杠403上,所述茎秆切割器406通过锁紧机构407安装在茎秆切割器下悬挂臂401上,所述茎秆切割器驱动电机408通过联轴器连接茎秆切割器406,并安装在丝杠架405上;
31.所述茎秆切割器上悬挂臂402、丝杠403、丝杠驱动电机404、丝杠架405、茎秆切割器406、锁紧机构407、茎秆切割器驱动电机408的数量为2个,所述茎秆切割器上悬挂臂402分别通过螺栓固定在移动平台100中部水平支架上,所述丝杠403分别通过轴承安装在茎秆切割器上悬挂臂402上,所述丝杠驱动电机404分别安装在茎秆切割器上悬挂臂402两侧电机箱内,所述丝杠架405分别安装在丝杠403上,所述茎秆切割器406分别通过锁紧机构407安装在茎秆切割器下悬挂臂401上,所述茎秆切割器驱动电机408分别通过联轴器连接茎秆切割器406,并安装在丝杠架405上。
32.茎秆切割器的水平位置可调,方便切割不同位置的茎秆;锁紧机构可防止因运行产生的振动使得茎秆切割器滑动,影响正常工作。
33.如图5所示,所述收集模块500包括收集箱501和箱挡502;
34.所述收集箱501安装在移动平台100下盖板后端,所述箱挡502数量为2个,分别通
过焊接固定在移动平台100下盖板上,分别位于收集箱501两侧前部。
35.收集模块的作用为临时存储收获的姜块,收集箱的底部设计为镂空状,可进一步分离土壤等杂物;利用箱挡可防止因运行产生的振动使得收集箱滑落,影响正常工作;收集箱两侧装有把手,方便更换收集箱。
36.本发明生姜收获装备的工作原理如下:
37.利用移动平台完成生姜收获装备的移动,利用茎秆切除模块完成对生姜茎秆的切割,利用挖掘模块完成对姜块的挖掘,利用运输分离模块完成姜土分离和运输姜块,利用收集模块完成对姜块的收集;
38.茎秆切割器的水平位置可调,方便切割不同水平位置的茎秆;在非工作状态下,电动推杆收缩,挖掘铲沿导轨上升至地面以上,方便生姜收获机行走移动。待进入工作状态,电动推杆伸长,挖掘铲进入工作位置;当移动平台运动时,铲受到土层压力以销轴为旋转中心旋转,通过弹簧产生振动,减少挖掘阻力,提升挖掘效率。生姜收获装备沿田垄前进,挖掘铲切断生姜根茎底层泥土,将姜土混合物沿铲面向上推行,经初步分离后落到输送分离机构的输送带上,随输送带一起向上移动。在运输过程中,姜土混合物的土壤等杂物逐渐滑落,生姜因输送带的三角棱柱挡条不会发生较大滑动。待运输至末端时,生姜自由滑落至收集箱中,收集箱满后生姜收获装备将暂停工作,替换新的收集箱并继续作业。提高了收获效率,减小了农民的劳动强度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

