1.本发明涉及码头沉箱安装基槽清淤技术领域,尤其涉及一种重力式码头沉箱安装的环保型快速清淤装置。
背景技术:
2.重力式码头是海运和河运中的重力承载结构,其在海河运输中具有重要的角色,其最主要的支撑部件为预制沉箱,而预制沉箱的安装作为重力式码头建造的最为重要的环节,对预制沉箱的沉降和安装必须精确定位以及保证基槽的平整。
3.在对基槽平整前,必须先对基槽内部进行清淤,从而保证沉箱安装基槽的平整度,在对基槽内部进行清淤时,根据实际的基槽底部的情况对基槽进行清淤是重要的,而基槽底部淤泥内部情况复杂多样,需要清淤船能够实时根据基槽的淤泥状况进行清淤,一方面通过绞刀头绞挖的淤泥中可能存在较大的石块,从而当石块和淤泥混合后在吸泥管道内造成堵管,并且混合的石块和淤泥无法重复利用时堆积不利于环保;另一方面,现有的清淤船无法实时根据基槽底部的淤泥的状况在清淤是作出及时的调整,导致清淤效果不好,效率不高,从而造成沉箱安装时的偏移等状况。
技术实现要素:
4.为此,本发明提供一种重力式码头沉箱安装的环保型快速清淤装置,用以克服现有技术中因堵管或在清淤过程中无法根据基槽的及时状况对清淤装置作出调整,导致清淤效率不高的问题。
5.为实现上述目的,本发明提供一种重力式码头沉箱安装的环保型快速清淤装置,包括船体以及设置在船体上、用以对沉箱安装基槽的淤泥进行清理的淤泥绞吸机构和设置在船体上、用以检测基槽淤泥中砂石分布情况的超声检测仪;
6.所述淤泥绞吸机构的清淤总管内安装有用以粉碎绞刀头绞挖的泥沙中的碎石的碎石粉碎机、设置在碎石粉碎机远离绞刀头一侧的用以筛分碎石和淤泥的碎石筛网、设置在清淤总管中心且与所述碎石筛网一端连接的碎石输送管道、以碎石输送管道为中心环形布置的多个吸泥口以及与吸泥口对应布置在清淤总管内的吸泥管道;
7.所述碎石粉碎机包括至少四个可调节间距的碎石辊,各碎石辊通过液压驱动组件驱动以转动破碎碎石;
8.所述碎石筛网为锥体结构,其靠近所述碎石粉碎机的一端为锥体宽部,与所述碎石输送管道连接的一端为锥体窄部,在所述锥体宽部的外侧设置有轮齿,该轮齿与所述液压驱动组件的主动轮啮合;所述锥体窄部与所述碎石输送通道活动连接;
9.所述碎石粉碎机靠近所述绞刀头一侧的清淤总管和靠近碎石筛网一侧的清淤总管的管壁上分别设置有贯通所述清淤总管的第一喷头和第二喷头,且所述第一喷头和第二喷头上均设置有电磁阀,在清淤作业时,控制器根据吸泥管道内淤泥的流速实时对电磁阀的开启角度进行控制;
10.当进行清淤作业时,所述控制器获取经碎石管道输送至船体上的碎石的最大粒径并根据该碎石最大粒径与碎石粒径范围的比对结果判定破碎后的碎石粒径是否合格,当控制器判定破碎后的碎石粒径合格时,控制器计算吸泥管道内的淤泥的输送速度以及碎石输送管道内的碎石的输送速度并在计算完成时将实际的淤泥含水量和碎石输送速度分别与预设淤泥含水量和预设碎石输送速度进行比对,比对完成后,控制器根据实际的比对结果确定是否对碎石辊的间距进行微调,在控制器对碎石辊的间距进行微调时,控制器计算实际确定的碎石输送速度与预设碎石输送速度的差值并根据该差值选取对应的辊间距调节系数对各碎石辊的间距进行调节,当控制器判定破碎后的碎石粒径不合格时,所述控制器对各碎石辊的间距进行修正。
11.进一步地,所述控制器还设有预设碎石输送速度vs0和预设淤泥含水量w0,当所述控制器判定破碎后的碎石粒径合格时,所述控制器根据输送至船体的碎石质量和输送时长计算碎石输送管道内的实际碎石流速vs和吸泥管道内的实际淤泥含水量w、将将实际碎石流速vs与预设碎石输送速度vs0进行比对并将实际淤泥含水量w与预设淤泥含水量w0进行比对,控制器根据比对结果判定是否对碎石辊的间距进行微调,
12.若vs<vs0且w<w0,所述控制器判定不对碎石辊的间距进行微调并获取所述第一喷头的电磁阀和第二喷头的电磁阀的开启角度,在获取完成时,控制器判定该开启角度是否可调;
13.若vs<vs0且w≥w0,所述控制器对碎石辊的间距进行微调;
14.若vs≥vs0且w<w0,所述控制器不对碎石辊的间距进行微调;
15.若vs≥vs0且w≥w0,所述控制器不对碎石辊的间距进行微调并获取所述第一喷头的电磁阀的开启角度和第二喷头的电磁阀的开启角度,在获取完成时,控制器判定该开启角度是否可调。
16.进一步地,当vs<vs0且w≥w0时,所述控制器计算管道内碎石输送速度vs与预设输送速度vs0的差值δvs,设定δvs=vs0
‑
vs,计算完成后控制器根据该差值与预设速度差值的比对结果选取对应的碎石辊间距调节系数对碎石辊的间距进行调节,
17.其中,所述控制器还设有第一预设速度差值δvs1、第二预设速度差值δvs2、第三预设速度差值δvs3、第一间距调节系数k1、第二间距调节系数k2以及第三间距调节系数k3,其中,δvs1<δvs2<δvs3,设定0.5<k3<k2<k1<1,
18.当δvs1≤δvs<δvs2时,所述控制器选取第一间距调节系数k1对碎石辊的间距进行调节;
19.当δvs2≤δvs<δvs3时,所述控制器选取第二间距调节系数k2对碎石辊的间距进行调节;
20.当δvs≥δvs3时,所述控制器选取第三间距调节系数k3对碎石辊的间距进行调节;
21.当所述控制器选取第j间距调节系数kj对对碎石辊间距进行调节时,设定j=1,2,3,控制器将调节后的碎石辊间距设置为h5,设定h5=hi
×
kj。
22.进一步地,当vs<vs0且w<w0或vs≥vs0且w≥w0是,所述控制器获取第一喷头的电磁阀的开启角度和第二喷头的电磁阀的开启角度并判定至少有一个喷头的开启角度可调节时,所述控制器计算淤泥的含水量w与预设含水量w0的差值δw,设定δw=w0
‑
w,计算
完成后控制器根据该差值与预设含水量差值的比对结果选取对应的电磁阀开启角度调节量以对第一喷头和/或第二喷头的电磁阀开启角度进行调节以增加吸泥管道的喷水量,
23.所述控制器还设有第一预设含水量差值δw1、第二预设含水量差值δw2、第三预设含水量差值δw3、第一电磁阀开启角度调节量δl1、第二电磁阀开启角度调节量δl2以及第四电磁阀开启角度调节量δl3,其中,δw1<δw2<δw3,δl1<δl2<δl3,
24.当δw1≤δw<δw2时,所述控制器选取第一电磁阀开启角度调节量δl1对电磁阀的开启角度进行调节;
25.当δw2≤δw<δw3时,所述控制器选取第二电磁阀开启角度调节量δl2对电磁阀的开启角度进行调节;
26.当δw≥δw3时,所述控制器选取第三电磁阀开启角度调节量δl3对电磁阀的开启角度进行调节;
27.当所述控制器选取第n电磁阀开启角度调节量δln对电磁阀的开启角度进行调节时,设定n=1,2,3,控制器将调节后的电磁阀开启角度设置为l',设定l'=l δln,其中,l为电磁阀的调节前电磁阀的开启角度。
28.进一步地,当所述控制器将电磁阀的开启角度设置为l'且经过t时长后,所述控制器重新比对碎石管道的碎石输送速度vs与预设碎石输送速度vs0,若vs<vs0,则控制器获取淤泥流速vy并将vy与预设淤泥流速vy0进行比对,若vy<vy0,控制器根据该比对结果对电磁阀的开启角度进行补偿,若vy≥vy0,控制器根据该比对结果对碎石辊的转速进行调节;若vs≥vs0,所述控制器将第一喷头的电磁阀调回至l。
29.进一步地,当vy<vy0时,所述控制器计算淤泥流速vy与预设淤泥流速vy0的差值δvya,设定δvya=vy0
‑
vy,计算完成后控制器根据该差值与预设淤泥流速差值的比对结果选取对应的补偿系数对电磁阀的开启角度进行补偿,
30.其中,所述控制器还设有第一预设淤泥流速差值δvy1、第二预设淤泥流速差值δvy2、第三预设淤泥流速差值δvy3、第一电磁阀开启角度补偿系数k1、第二电磁阀开启角度补偿系数k2以及第三电磁阀开启角度补偿系数k3,其中δvy1<δvy2<δvy3,设定1<k1<k2<k3<2,
31.当δvy1≤δvya<δvy2时,所述控制器选取第一电磁阀开启角度补偿系数k1对电磁阀的开启角度进行补偿;
32.当δvy2≤δvya<δvy3时,所述控制器选取第二电磁阀开启角度补偿系数k2对电磁阀的开启角度进行补偿;
33.当δvya≥δvy3时,所述控制器选取第三电磁阀开启角度补偿系数k3对电磁阀的开启角度进行补偿;
34.当所述控制器选取第z电磁阀开启角度补偿系数kz对电磁阀的开启角度进行补偿时,设定z=1,2,3,控制器将补偿后的电磁阀的开启角度设置为l'',设定l''=l'
×
kz。
35.进一步地,当vy≥vy0时,所述控制器计算淤泥流速vy与预设淤泥流速vy0的差值δvyb,设定δvyb=vy
‑
vy0,计算完成后控制器根据该差值与预设淤泥流速差值的比对结果选取对应的碎石辊转速调节系数对碎石辊的转速进行调节,其中所述控制器还设有第一碎石辊转速调节系数x1、第二碎石辊转速调节系数x2以及第三碎石辊转速调节系数x3,设定1<x1<x2<x3<2,
36.当δvy1≤δvyb<δvy2时,所述控制器选取第一碎石辊转速调节系数x1对碎石辊的转速进行调节;
37.当δvy2≤δvyb<δvy3时,所述控制器选取第二碎石辊转速调节系数x3对碎石辊的转速进行调节;
38.当δvyb≥δvy3时,所述控制器选取第三碎石辊转速调节系数x3对碎石辊的转速进行调节;
39.当所述控制器选取第m碎石辊转速调节系数xm对碎石辊的转速进行调节时,设定m=1,2,3,所述控制器将调节后的碎石辊转速设置为vg',设定vg'=vgi
×
xm,i=1,2,3。
40.进一步地,所述控制器设置有预设碎石粒径范围rf,当所述控制器确定碎石最大粒径完成时,设定碎石最大粒径为dmax,控制器将该碎石粒径与预设碎石粒径范围进行比对并根据该比对结果判定破碎后的碎石粒径是否合格,
41.当dmax∈rf时,所述控制器判定破碎后的碎石粒径合格;
42.当时,所述控制器判定破碎后的碎石粒径不合格。
43.进一步地,当所述控制器判定破碎后的碎石粒径不合格时,所述控制器根据实际碎石最大粒径dmax与预设碎石最大粒径范围rf的最大值db的差值δd,设定δd=dmax
‑
db,并根据该差值选取对应的修正量对已经确定完成的碎石辊间距进行修正,并将调节后的碎石辊间距设置为h4',设定h4'=hi
‑
δh2,其中,δh2为碎石辊间距修正的修正量。
44.进一步地,当进行清淤作业前,所述控制器控制所述超声检测仪对所述沉箱安装基槽进行预检测,并根据检测结果分析所述沉箱安装基槽待清淤部位的泥沙中的碎石分布状况,控制器根据检测的碎石分布结果确定所述砂石粉碎机的各粉碎辊的间距和转速,并在确定所述间距和转速完成时,控制器控制启动所述淤泥绞吸机构进行清淤。
45.与现有技术相比,本发明的有益效果在于,通过在设置检测砂石分布情况的超声检测仪以及在淤泥绞吸机构内设置碎石粉碎机、碎石筛网以及碎石输送管道,通过碎石粉碎机将碎石粉碎之后,通过碎石筛网将碎石和淤泥进行分离,淤泥通过吸泥口吸入,碎石和部分淤泥混合后通过碎石输送管道输送至清淤船上,从而避免了在淤泥含水量过低时,夹杂碎石导致清淤管道堵塞的问题,从而进一步提高了清淤效率,通过碎石筛网将碎石和淤泥筛分后,碎石和淤泥可以重复利用在更多的地方,例如将碎石重新垫铺在河床或海床上,或者用于沉箱预制的骨料,减少从其他地区调用沉箱预制所用的骨料,节约了大量能源的同时还能够达到环境保护的效果;
46.尤其,通过在控制器设置碎石粒径范围,并在进行清淤作业时,检测输送至船体上的碎石的粒径并将该粒径与碎石粒径范围进行比对,根据比对结果判定碎石粒径是否合格,进一步根据判定结果对碎石辊间距进行调节,并调节碎石辊间距时,根据实际碎石管道内碎石的输送速度和淤泥的含水量的检测结果记你一步确定是否对碎石辊的间距进行调节,进一步提高了对所述重力式码头沉箱安装的环保型快速清淤装置的控制精度,进一步避免了清淤管道堵塞的问题,从而进一步提高了清淤效率。
47.进一步地,通过超声波检测仪对基槽以扫描方式的预检测,获取基槽的淤泥中碎石的分布情况,并根据实际碎石的分布密度和最大碎石粒径初步确定碎石辊的间距和转速,并在确定完成时,启动所述重力式沉箱码头的沉箱安装的快速清淤装置对沉箱安装基槽进行清淤,进一步避免了淤泥碎石混合后堵管的问题,从而进一步提高了清淤效率;
48.尤其,当碎石密度较大时,将碎石辊间距进行调节并同时将碎石辊的转速设置为第三碎石辊转速的1.5倍,进一步提高了对清淤装置的控制精度,从而进一步提高了清淤效率。
49.进一步地,通过在控制器设置预设碎石输送速度和预设淤泥含水量,当初步判定碎石粒径合格时,根据实际碎石输送速度和实际淤泥含水量与预设碎石输送速度和预设淤泥含水量的比对结果进一步共同确定是否调节碎石辊间距,进一步提高了对清淤装置的控制精度,从而进一步提高了清淤效率。
附图说明
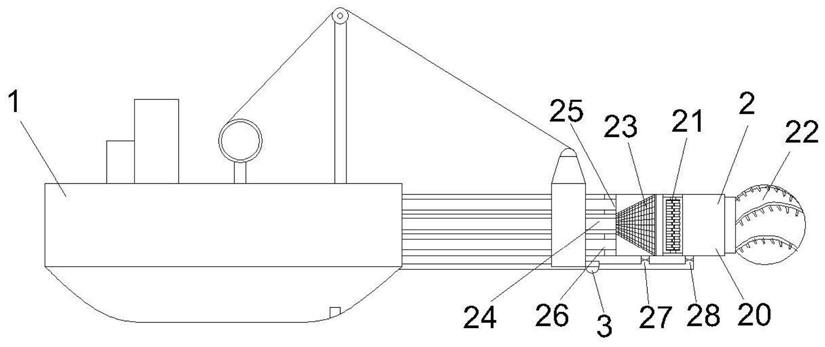
50.图1为本发明所述重力式码头沉箱安装的环保型快速清淤装置的整体结构示意图;
51.图2为本发明所述重力式码头沉箱安装的环保型快速清淤装置的绞吸机构俯视图;
52.图3为本发明所述重力式码头沉箱安装的环保型快速清淤装置的吸泥口结构示意图。
具体实施方式
53.为了使本发明的目的和优点更加清楚明白,下面结合实施例对本发明作进一步描述;应当理解,此处所描述的具体实施例仅仅用于解释本发明,并不用于限定本发明。
54.下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非在限制本发明的保护范围。
55.需要说明的是,在本发明的描述中,术语“上”、“下”、“左”、“右”、“内”、“外”等指示的方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
56.此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
57.请参阅图1
‑
3所示,图1为本发明所述重力式码头沉箱安装的环保型快速清淤装置的整体结构示意图;图2为本发明所述重力式码头沉箱安装的环保型快速清淤装置的绞吸机构俯视图;图3为本发明所述重力式码头沉箱安装的环保型快速清淤装置的吸泥口结构示意图。
58.本发明实施例所述重力式码头沉箱安装的环保型快速清淤装置,包括船体1以及设置在船体1上、用以对沉箱安装基槽的淤泥进行清理的淤泥绞吸机构2和设置在船体上、用以检测基槽淤泥中砂石分布情况的超声检测仪3;
59.所述淤泥绞吸机构的清淤总管20内安装有用以将绞刀头绞挖的泥沙中的碎石进行粉碎的碎石粉碎机21、设置在碎石粉碎机21远离绞刀头22一侧的用以对碎石和淤泥进行
筛分的碎石筛网23、设置在清淤总管20中心且与所述碎石筛网23一端连接的碎石输送管道24、以碎石输送管道24为中心环形布置的多个吸泥口25以及与吸泥口25对应布置在清淤总管20内的吸泥管道26;
60.所述碎石粉碎机21包括至少四个可调节间距的碎石辊211,其中两个碎石辊作211作为一组,当进行清淤作业时,液压泵向液压驱动组件212输入液压油以通过液压驱动组件212驱动一组碎石辊211对向转动以破碎绞挖的泥沙中的碎石并将破碎后的碎石输送至碎石筛网23进行筛分,有效避免了因吸入过大的碎石而堵塞清淤总管20的状况,所述碎石粉碎机21在破碎碎石时,通过向液压驱动组件212输入和输出液压油以使液压驱动组件212的主动轮213和从动轮214转动分别驱动两组碎石辊211转动进行碎石。
61.本发明实施例中,各碎石辊的辊轴上连接固定块215,且各固定块均与一螺杆216经连杆217连接,所述螺杆与一组碎石辊211的从动辊的连杆连接处设置有螺纹,且两段螺纹为反向设置,通过在螺杆216两端设置电机或液压驱动机构驱动螺杆转动以对碎石辊进行间距调节。
62.所述碎石筛网23为锥体结构,其靠近所述碎石粉碎机21的一端为锥体宽部,与所述碎石输送管道24连接的一端为锥体窄部,并在所述锥体宽部的外沿设置有轮齿231,且该轮齿与所述液压驱动组件的主动轮啮合,所述锥体窄部与所述碎石输送通道24活动连接,当所述碎石粉碎机将碎石破碎并输送至碎石筛网时,碎石筛网经液压组件的驱动转动,将部分泥沙筛分至碎石筛网一侧,将剩余泥沙和破碎的碎石保留在碎石筛网另一侧,并通过碎石筛网的转动和碎石输送管道的吸力将碎石输送至船体,通过将碎石和泥沙进行筛分,有效提高了所述装置的清淤的效率。
63.所述碎石粉碎机21靠近所述绞刀头22的一侧的清淤总管和靠近碎石筛网23的一侧的清淤总管20的管壁上均设置有贯通所述清淤总管的第一喷头27和第二喷头28,且所述第一喷头27和第二喷头28上均设置有电磁阀,在清淤作业时,控制器根据吸泥管道26内淤泥的流速实时对电磁阀的开启角度进行控制;
64.本发明通过在靠近绞刀头和靠近碎石筛网的清淤总管的管壁上设置带有电磁阀的喷头,通过喷头向清淤总管内喷水,以避免由于泥沙含水量较低堵塞清淤管道,进一步提高了所述装置的清淤效率。
65.可以理解的是,本发明上述实施例中的所述液压驱动组件也可以是电机或其他部件,只要其能够达到上述工作过程中的工作状态即可。
66.当进行清淤作业时,所述控制器获取经碎石管道输送至船体上的碎石的最大粒径并根据该碎石最大粒径与碎石粒径范围的比对结果判定破碎后的碎石粒径是否合格,当控制器判定破碎后的碎石粒径合格时,控制器计算吸泥管道内的淤泥的输送速度以及碎石输送管道内的碎石的输送速度并在计算完成时将实际的淤泥含水量和碎石输送速度分别与预设淤泥含水量和预设碎石输送速度进行比对,比对完成后,控制器根据实际的比对结果确定是否对碎石辊的间距进行调节,在控制器对碎石辊的间距进行调节时,控制器计算实际确定的碎石输送速度与预设碎石输送速度的差值并根据该差值选取对应的辊间距调节系数对各碎石辊的间距进行调节,当控制器判定破碎后的碎石粒径不合格时,所述控制器对各碎石辊的间距进行修正。
67.具体而言,通过在淤泥绞吸机构的外部设置检测砂石分布情况的超声检测仪以及
在淤泥绞吸机构内部设置碎石粉碎机、碎石筛网以及碎石输送管道,通过碎石粉碎机将碎石粉碎之后,通过碎石筛网将碎石和淤泥进行分离,淤泥通过吸泥口吸入,碎石和部分淤泥混合后通过碎石输送管道输送至清淤船上,从而避免了在淤泥含水量过低时,夹杂碎石导致清淤管道堵塞的问题,从而进一步提高了清淤效率,通过碎石筛网将碎石和淤泥筛分后,碎石和淤泥可以重复利用在更多的地方,例如将碎石重新垫铺在河床或海床上,或者用于沉箱预制的骨料,减少从其他地区调用沉箱预制所用的骨料,节约了大量资源的同时还能够达到环境保护的效果;
68.尤其,通过在控制器设置碎石粒径范围,并在进行清淤作业时,检测输送至船体上的碎石的粒径并将该粒径与碎石粒径范围进行比对,根据比对结果判定碎石粒径是否合格,进一步根据判定结果对碎石辊间距进行调节,并调节碎石辊间距时,根据实际碎石管道内碎石的输送速度和淤泥的含水量的检测结果记你一步确定是否对碎石辊的间距进行调节,进一步提高了对所述重力式码头沉箱安装的环保型快速清淤装置的控制精度,进一步避免了清淤管道堵塞的问题,从而进一步提高了清淤效率。
69.本发明实施例中,所述第一喷头和第二喷头至少为两个。
70.请继续参阅图1
‑
3所示,本发明实施例所述重力式码头沉箱安装的环保型快速清淤装置,所述根据检测结果分析所述沉箱安装基槽待清淤部位的泥沙内部的碎石分布状况包括通过超声波检测仪对待清淤部位进行扫描,并在扫描完成时,获取扫描区域淤泥中碎石的平均单位体积的碎石密度u和最大碎石粒径d,并在扫描完成时,控制器根据最大碎石粒径d与预设碎石粒径范围的比对结果初步确定碎石辊的间距,
71.其中,在所述控制器设置有第一预设碎石粒径范围r1、第二预设碎石粒径范围r2、第一碎石辊间距h1、第二碎石辊间距h2以及第三碎石辊间距h3,其中,r1<r2,h1<h2<h3,
72.当d∈r1时,所述控制器将碎石辊的间距设置为第一碎石辊间距h1;
73.当d∈r2时,所述控制器将碎石辊的间距设置为第二碎石辊间距h2;
74.当最大碎石粒径d超出第二预设碎石粒径范围r2时,所述控制器将碎石辊的间距设置为第三碎石辊间距h3。
75.并在确定碎石辊间距完成时,所述控制器根据平均单位体积的碎石密度u与预设碎石密度的比对结果确定碎石辊的转速,
76.其中,在所述控制器中设置有第一预设碎石密度u1、第二碎石密度u2、第三碎石密度u3、第一碎石辊转速vg1、第二碎石辊转速vg2以及第三碎石辊转速vg3,其中,u1<u2<u3,vg1<vg2<vg3,
77.当u≤u1时,所述控制器将碎石辊的转速设置为第一碎石辊转速vg1;
78.当u1<u≤u2时,所述控制器将碎石辊的转速设置为第二碎石辊转速vg2;
79.当u2<u≤u3时,所述控制器将碎石辊的转速设置为第三碎石辊转速vg3;
80.当u>u3时,所述控制器对已经确定完成的碎石辊间距进行第一次调节,调节后的碎石辊间距设置为h4并将碎石辊转速设置为1.5vg3,设定h4=hi
‑
δh1,设定i=1,2,3,其中δh1为碎石辊间距第一次调节的调节量。
81.具体而言,通过超声波检测仪对基槽以扫描方式的预检测,获取基槽的淤泥中碎石的分布情况,并根据实际碎石的分布密度和最大碎石粒径初步确定碎石辊的间距和转速,并在确定完成时,启动所述重力式沉箱码头的沉箱安装的快速清淤装置对沉箱安装基
槽进行清淤,进一步避免了淤泥碎石混合后堵管的问题,从而进一步提高了清淤效率;
82.尤其,当碎石密度较大时,将碎石辊间距进行调节并同时将碎石辊的转速设置为第三碎石辊转速的1.5倍,进一步提高了对清淤装置的控制精度,从而进一步提高了清淤效率。
83.请继续参阅图1
‑
3所示,本发明实施例所述重力式码头沉箱安装的环保型快速清淤装置,当确定碎石辊的间距和转速完成时,所述控制器启动所述淤泥绞吸机构对所述沉箱安装基槽进行清淤,并在清淤过程中,所述控制器获取经碎石输送管道输送至船体上的碎石粒径范围rc,并将该碎石粒径范围rc与第三预设碎石粒径范围r3进行比对,控制器根据该比对结果判定破碎后的碎石粒径是否合格,
84.当rc∈r3时,所述控制器判定破碎后的碎石粒径合格;
85.当时,所述控制器判定破碎后的碎石粒径不合格。
86.所述控制器内还设有预设碎石输送速度vs0和预设淤泥含水量w0,当所述控制器判定破碎后的碎石粒径合格时,所述控制器根据输送至船体的碎石的质量与使用的时间计算管道内的碎石流速vs,并将该碎石流速vs与预设碎石输送速度vs0进行比对,若vs<vs0,控制器获取淤泥的含水量w,并根据该含水量w与预设含水量w0的比对结果判定是否对碎石辊的间距进行微调,若w<w0,控制器判定不调节碎石辊间距,若w≥w0,控制器判定调节碎石辊间距,若vs≥vs0,控制器判定不调节碎石辊间距。
87.具体而言,通过在控制器设置预设碎石输送速度和预设淤泥含水量,当初步判定碎石粒径合格时,根据实际碎石输送速度和实际淤泥含水量与预设碎石输送速度和预设淤泥含水量的比对结果进一步共同确定是否调节碎石辊间距,进一步提高了对清淤装置的控制精度,从而进一步提高了清淤效率。
88.请继续参阅图1
‑
3所示,本发明实施例所述重力式码头沉箱安装的环保型快速清淤装置,当控制器判定调节碎石辊间距时,所述控制器计算管道内碎石输送速度vs与预设输送速度vs0的差值δvs,设定δvs=vs0
‑
vs,并根据该差值与预设速度差值的比对结果选取对应的碎石辊间距调节系数对碎石辊的间距进行调节,
89.其中,所述控制器还设有第一预设速度差值δvs1、第二预设速度差值δvs2、第三预设速度差值δvs3、第一间距调节系数k1、第二间距调节系数k2以及第三间距调节系数k3,其中,δvs1<δvs2<δvs3,设定1<k1<k2<k3<2,
90.当δvs1≤δvs<δvs2时,所述控制器选取第一间距调节系数k1对碎石辊的间距进行调节;
91.当δvs2≤δvs<δvs3时,所述控制器选取第二间距调节系数k2对碎石辊的间距进行调节;
92.当δvs≥δvs3时,所述控制器选取第三间距调节系数k3对碎石辊的间距进行调节;
93.当所述控制器选取第j间距调节系数kj对对碎石辊间距进行调节时,设定j=1,2,3,控制器将调节后的碎石辊间距设置为h5,设定h5=hi
×
kj。
94.具体而言,通过在控制器设置速度差值和间距调节系数,并当判定对碎石辊间距进行调节时,根据实时碎石输送速度和预设碎石输送速度的差值选取对应的间距调节系数以调节碎石辊的间距,进步提高了对清淤装置的控制精度,从而进一步提高了清淤效率。
95.请继续参阅图1
‑
3所示,本发明实施例所述重力式码头沉箱安装的环保型快速清淤装置,当vs<vs0且w<w0时,所述控制器计算淤泥的含水量w与预设含水量w0的差值δw,设定δw=w0
‑
w,并根据该差值与预设含水量差值的比对结果选取对应的电磁阀开启角度调节量对第二喷头和第一喷头的电磁阀开启角度进行调节以使向吸泥管道内增加喷水量,
96.其中,所述控制器还设有第一预设含水量差值δw1、第二预设含水量差值δw2、第三预设含水量差值δw3、第一电磁阀开启角度调节量δl1、第二电磁阀开启角度调节量δl2以及第四电磁阀开启角度调节量δl3,其中,δw1<δw2<δw3,δl1<δl2<δl3,
97.当δw1≤δw<δw2时,所述控制器选取第一电磁阀开启角度调节量δl1对电磁阀的开启角度进行调节;
98.当δw2≤δw<δw3时,所述控制器选取第二电磁阀开启角度调节量δl2对电磁阀的开启角度进行调节;
99.当δw≥δw3时,所述控制器选取第三电磁阀开启角度调节量δl3对电磁阀的开启角度进行调节;
100.当所述控制器选取第n电磁阀开启角度调节量δln对电磁阀的开启角度进行调节时,设定n=1,2,3,控制器将调节后的电磁阀开启角度设置为l',设定l'=l δln,其中,l为电磁阀的初始开启角度。
101.具体而言,通过在控制器设置含水量差值和电磁阀开启角度调节系数,当控制器判定不对碎石辊间距进行调节时,获取实际的淤泥含水量,当含水量低于预设值时,计算实际淤泥含水量与预设淤泥含水量的差值,控制器根据计算的差值选取对应电磁阀开启角度调节量同时对第一喷头和第二喷头的电磁阀开启角度进行调节,进一步提高了清淤装置的控制精度,从而进一步提高了清淤效率。
102.请继续参阅图1
‑
3所示,本发明实施例所述重力式码头沉箱安装的环保型快速清淤装置,当所述控制器将电磁阀的开启角度设置为l'并经过一定时间后,所述控制器重新比对碎石管道的碎石输送速度vs与预设碎石输送速度vs0,若vs<vs0,则控制器获取淤泥流速vy,并将淤泥流速vy与预设淤泥流速vy0进行比对,若vy<vy0,控制器根据该比对结果对电磁阀的开启角度进行补偿,若vy≥vy0,控制器根据该比对结果对碎石辊的转速进行调节,若vs≥vs0,控制器将第一喷头的电磁阀调回至l。
103.具体而言,当vy<vy0时,所述控制器计算淤泥流速vy与预设淤泥流速vy0的差值δvya,设定δvya=vy0
‑
vy,并根据该差值与预设淤泥流速差值的比对结果选取对应的补偿系数对电磁阀的开启角度进行补偿,
104.其中,所述控制器还设有第一预设淤泥流速差值δvy1、第二预设淤泥流速差值δvy2、第三预设淤泥流速差值δvy3、第一电磁阀开启角度补偿系数k1、第二电磁阀开启角度补偿系数k2以及第三电磁阀开启角度补偿系数k3,其中δvy1<δvy2<δvy3,设定1<k1<k2<k3<2,
105.当δvy1≤δvya<δvy2时,所述控制器选取第一电磁阀开启角度补偿系数k1对电磁阀的开启角度进行补偿;
106.当δvy2≤δvya<δvy3时,所述控制器选取第二电磁阀开启角度补偿系数k2对电磁阀的开启角度进行补偿;
107.当δvya≥δvy3时,所述控制器选取第三电磁阀开启角度补偿系数k3对电磁阀的
开启角度进行补偿;
108.当所述控制器选取第z电磁阀开启角度补偿系数kz对电磁阀的开启角度进行补偿时,设定z=1,2,3,控制器将补偿后的电磁阀的开启角度设置为l'',设定l''=l'
×
kz。
109.具体而言,通过在控制器设置淤泥流速差值和电磁阀开启角度补偿系数,当将第一喷头和第二喷头电磁阀开启角度调节后实际淤泥流速大于等于预设淤泥流速,控制器将第一喷头的电磁阀开启角度调回至原开启角度,若调节后实际淤泥流速小于预设淤泥流速,则计算实际淤泥流速和预设淤泥流速的差值,在计算完成时,根据实际差值与预设淤泥流速差值的比对结果选取对应的电磁阀开启角度补偿系数对电磁阀开启角度进行补偿,进一步提高了对清淤装置的控制精度,从而进一步提高了清淤效率。
110.请继续参阅图1
‑
3所示,本发明实施例所述重力式码头沉箱安装的环保型快速清淤装置,当vy≥vy0时,所述控制器计算淤泥流速vy与预设淤泥流速vy0的差值δvyb,设定δvyb=vy
‑
vy0,并根据该差值与预设淤泥流速差值的比对结果选取对应的碎石辊转速调节系数对碎石辊的转速进行调节,
111.其中所述控制器还设有第一碎石辊转速调节系数x1、第二碎石辊转速调节系数x2以及第三碎石辊转速调节系数x3,设定1<x1<x2<x3<2,
112.当δvy1≤δvyb<δvy2时,所述控制器选取第一碎石辊转速调节系数x1对碎石辊的转速进行调节;
113.当δvy2≤δvyb<δvy3时,所述控制器选取第二碎石辊转速调节系数x3对碎石辊的转速进行调节;
114.当δvyb≥δvy3时,所述控制器选取第三碎石辊转速调节系数x3对碎石辊的转速进行调节;
115.当所述控制器选取第m碎石辊转速调节系数xm对碎石辊的转速进行调节时,设定m=1,2,3,所述控制器将调节后的碎石辊转速设置为vg',设定vg'=vgi
×
xm,i=1,2,3。
116.具体而言,通过在控制器设置碎石辊转速调节系数,并当实时淤泥流速大于等于预设淤泥流速时,计算实际淤泥流速与预设淤泥流速的差值,控制器将该差值与预设淤泥流速差值进行比对,并根据比对结果选取对应的碎石辊转速调节系数对碎石辊的转速进行调节,进一步提高了对清淤装置的控制精度,从而进一步提高了清淤效率。
117.请继续参阅图1
‑
3所示,本发明实施例所述重力式码头沉箱安装的环保型快速清淤装置,当所述控制器判定破碎后的碎石粒径不合格时,所述控制器对已经确定完成的碎石辊间距进行第二次调节,并将调节后的碎石辊间距设置为h4',设定h4'=hi δh2,其中,δh2为碎石辊间距第二次调节的调节量。
118.本发明实施方式中,所述碎石筛网可沿所述碎石输送管道的轴心转动。
119.至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
120.以上所述仅为本发明的优选实施例,并不用于限制本发明;对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。