1.本发明涉及智能畜牧业技术领域,具体而言,涉及一种生猪疫苗注射机器人以及疫苗注射方法。
背景技术:
2.畜牧业是关系国计民生的重要产业,动物疫病的防控是关键工作,随着人工智能在畜牧业越来越广泛的应用,对动物防疫的防控提出了更高的要求。以生猪养殖为例,目前主要是人工采用打针的方式对生猪注射疫苗,由于生猪数量非常大,导致劳动强度非常大,人工成本高,注射效率低,也容易发生漏打、误打的情况,严重影响疫病防控管理,因此,如何降低人工成本,减少人畜接触,提高注射效率,保证注射质量已成为本领域技术人员亟待解决的技术问题。
技术实现要素:
3.本发明就是为了解决现有人工采用打针的方式对生猪注射疫苗劳动强度大,人工成本高,注射效率低,容易发生漏打、误打的技术问题,提供大幅降低人工成本,提高注射效率,保证注射质量,减少人畜接触的生猪疫苗注射机器人以及疫苗注射方法。
4.本发明提供一种生猪疫苗注射机器人,包括轮式移动平台、六自由度协作机械臂、无针头注射器、rgb
‑
d相机、相机支架以及控制系统,六自由度协作机械臂与轮式移动平台连接,无针头注射器设有手柄和注射头,手柄与六自由度协作机械臂的末端法兰固定连接;相机支架与六自由度协作机械臂的末端连接,rgb
‑
d相机与相机支架固定连接;轮式移动平台设有移动平台主控制器、电机驱动器,电机驱动器与移动平台主控制器连接;
5.控制系统包括上位机、rfid电子耳标、rfid耳标识别器、机械臂控制器、网关和云平台,机械臂控制器设置在轮式移动平台中,rfid耳标识别器通过网关与云平台通信,上位机通过网关与云平台通信,机械臂控制器与上位机连接,六维力传感器与上位机连接,rgb
‑
d相机与上位机连接,移动平台主控制器与上位机连接。
6.优选地,生猪疫苗注射机器人还包括六维力传感器,六维力传感器与六自由度协作机械臂的末端法兰连接,无针头注射器的手柄与六维力传感器的连接法兰固定连接。
7.本发明还提供一种应用生猪疫苗注射机器人的疫苗注射方法,包括以下步骤:
8.步骤s101,将rfid耳标识别器连接于圈舍内的饮水槽处,将rfid电子耳标固定在猪只的耳朵上;rfid电子耳标中有id信息和位置信息;rfid耳标识别器实时将从rfid电子耳标采集到的id信息和位置信息通过wifi网络上传给云平台;
9.步骤s102,使生猪疫苗注射机器人运动到圈舍附近的等待位置,此时六自由度协作机械臂处于初始位姿;
10.步骤s103,上位机通过wifi网络访问云平台,查询云平台中的id信息和位置信息;
11.步骤s104,判断是否查询到id信息和位置信息,如果是则进入步骤s105,否则返回步骤s103;
12.步骤s105,上位机从云平台获取待注射猪只的id信息和位置信息;
13.步骤s106,上位机发送运动控制指令给轮式移动平台的移动平台主控制器;
14.步骤s107,平台主控制器根据运动控制指令生成电机驱动信号,并将电机驱动信号发送给轮式移动平台的电机驱动器,电机驱动器驱动轮式移动平台中用于驱动轮子的电机工作,使轮式移动平台移动到目标圈舍内,轮式移动平台移动到正在饮水的猪只旁边;
15.步骤s108,判断上位机是否查询到id信息和位置信息,如果是就进入s109,否则返回步骤s104;
16.步骤s109,上位机给机械臂控制器发送控制指令,机械臂控制器控制六自由度协作机械臂从初始位姿运动至猪侧身拍照位姿;
17.步骤s110,上位机控制rgb
‑
d相机对猪只的侧身进行拍照,以获得猪只的图像信息,并将图像信息发送给上位机;
18.步骤s111,上位机根据图像信息经过视觉识别技术识别猪只的侧身,并根据识别出的侧身中臀部的空间位置信息计算出臀部拍照位姿,进而计算出六自由度协作机械臂的6个关节的目标转动角度,然后将目标转动角度数据发送给机械臂控制器;
19.步骤s112,上位机给机械臂控制器发送控制指令,机械臂控制器控制六自由度协作机械臂运动到猪臀部拍照位姿;
20.步骤s113,上位机控制rgb
‑
d相机对猪只的臀部进行拍照,以获得猪臀部的图像信息,并将猪臀部的图像信息发送给上位机;
21.步骤s114,上位机根据猪臀部的图像信息经过视觉识别技术识别猪臀部的可注射区域,选取可注射区域的中心位置坐标作为注射部位,根据中心位置坐标和法向量计算出注射位姿,进而计算出六自由度协作机械臂的6个关节的目标转动角度,然后将目标转动角度数据发送给机械臂控制器;
22.步骤s115,机械臂控制器控制六自由度协作机械臂运动到注射位姿;
23.步骤s116,机械臂控制器控制控制六自由度协作机械臂先运动返回到猪臀部拍照位姿,然后返回到猪侧身拍照位姿,最后运动返回到初始位姿,至此完成注射动作。
24.本发明还提供一种应用生猪疫苗注射机器人的疫苗注射方法,包括以下步骤:
25.步骤s101,将rfid耳标识别器连接于圈舍内的饮水槽处,将rfid电子耳标固定在猪只的耳朵上;rfid电子耳标中有id信息和位置信息;rfid耳标识别器实时将从rfid电子耳标采集到的id信息和位置信息通过wifi网络上传给云平台;
26.步骤s102,使生猪疫苗注射机器人运动到圈舍附近的等待位置,此时六自由度协作机械臂处于初始位姿;
27.步骤s103,上位机通过wifi网络访问云平台,查询云平台中的id信息和位置信息;
28.步骤s104,判断是否查询到id信息和位置信息,如果是则进入步骤s105,否则返回步骤s103;
29.步骤s105,上位机从云平台获取待注射猪只的id信息和位置信息;
30.步骤s106,上位机发送运动控制指令给轮式移动平台的移动平台主控制器;
31.步骤s107,平台主控制器根据运动控制指令生成电机驱动信号,并将电机驱动信号发送给轮式移动平台的电机驱动器,电机驱动器驱动轮式移动平台中用于驱动轮子的电机工作,使轮式移动平台移动到目标圈舍内,轮式移动平台移动到正在饮水的猪只旁边;
32.步骤s108,判断上位机是否查询到id信息和位置信息,如果是就进入s109,否则返回步骤s104;
33.步骤s109,上位机给机械臂控制器发送控制指令,机械臂控制器控制六自由度协作机械臂从初始位姿运动至猪侧身拍照位姿;
34.步骤s110,上位机控制rgb
‑
d相机对猪只的侧身进行拍照,以获得猪只的图像信息,并将图像信息发送给上位机;
35.步骤s111,上位机根据图像信息经过视觉识别技术识别猪只的侧身,并根据识别出的侧身中臀部的空间位置信息计算出臀部拍照位姿,进而计算出六自由度协作机械臂的6个关节的目标转动角度,然后将目标转动角度数据发送给机械臂控制器;
36.步骤s112,上位机给机械臂控制器发送控制指令,机械臂控制器控制六自由度协作机械臂运动到猪臀部拍照位姿;
37.步骤s113,上位机控制rgb
‑
d相机对猪只的臀部进行拍照,以获得猪臀部的图像信息,并将猪臀部的图像信息发送给上位机;
38.步骤s114,上位机根据猪臀部的图像信息经过视觉识别技术识别猪臀部的可注射区域,选取可注射区域的中心位置坐标作为注射部位,根据中心位置坐标和法向量计算出注射位姿,进而计算出六自由度协作机械臂的6个关节的目标转动角度,然后将目标转动角度数据发送给机械臂控制器;
39.步骤s115,机械臂控制器控制六自由度协作机械臂运动到注射位姿;
40.步骤s116,六维力传感器检测无针头注射器的手柄与猪只的臀部之间的接触力,判断六维力传感器检测到的接触力是否大于设定的阈值,如果是则进入步骤s117,否则返回步骤s115;
41.步骤s117,机械臂控制器控制六自由度协作机械臂继续前进运动一定时间;
42.步骤s118,机械臂控制器控制控制六自由度协作机械臂先运动返回到猪臀部拍照位姿,然后返回到猪侧身拍照位姿,最后运动返回到初始位姿,至此完成注射动作。
43.优选地,步骤s111中,上位机根据图像信息经过卷积神经网络算法识别猪只的侧身。
44.优选地,步骤s114中,上位机根据猪臀部的图像信息经过卷积神经网络算法识别猪臀部的可注射区域。
45.优选地,步骤s105中,上位机从云平台获取待注射猪只的id信息和位置信息以及待注射疫苗信息。
46.优选地,步骤s118之后,机械臂到达初始位姿后,上位机通过网关向云平台反馈已注射猪只的id信息和疫苗信息。
47.本发明的有益效果是:
48.(1)猪只始终在圈舍内,在猪只不离开圈舍的情况下,机器人自动移动到猪只旁边通过机械臂进行快速地自动注射,解放饲养人员,降低劳动强度,大幅降低人工成本,提高注射效率,减少人畜接触。
49.(2)对每一个猪只进行编号,对打过疫苗的猪只进行记录,杜绝漏打、误打的情况发生,提高注射质量。
50.(3)自动识别猪只位置,自动寻找饲养区域,自动识别猪只身体上的待注射部位。
51.(4)无针头注射方式,可以避免交叉感染。
52.(5)与云平台实时通信,并将注射信息实时返回到云平台。
53.(6)一台机器人覆盖多个圈舍。
54.(7)通过视觉识别技术对猪只的注射部位准确识别,并基于识别到的信号自动控制机械臂运动至注射位姿。
55.(8)注射完成后,将注射猪只和疫苗信息,传回云平台进行管理。
56.(9)机器人左侧跟右侧的猪只,都可以准确完成疫苗注射。
57.(10)单次注射时间4
‑
5秒,从猪侧身识别直至完成注射并撤回。
58.(11)猪只在栏内,机器人在栏外,10秒内完成跨栏注射。
59.(12)耳标识别信息传到云平台耗时4秒。
60.本发明进一步的特征和方面,将在以下参考附图的具体实施方式的描述中,得以清楚地记载。
附图说明
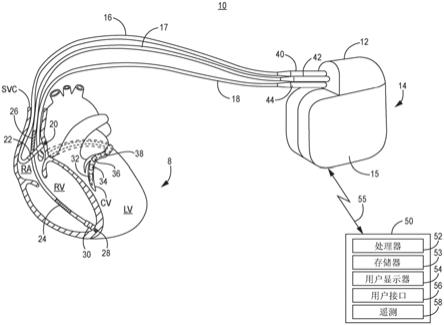
61.图1是生猪疫苗注射机器人整体结构示意图;
62.图2是图1所示生猪疫苗注射机器人的左视图;
63.图3是图1所示生猪疫苗注射机器人的右视图;
64.图4是图1所示生猪疫苗注射机器人的俯视图;
65.图5是图2中p处的局部放大图;
66.图6是图1中,六维力传感器与六自由度协作机械臂的末端连接,无针头注射器与六维力传感器连接,rgb
‑
d相机安装在六自由度协作机械臂末端的结构示意图;
67.图7是控制系统原理图;
68.图8是养猪场的平面图;
69.图9是图8中的一个圈舍的平面图;
70.图10是图9中,猪只在饮水槽处饮水的状态示意图;
71.图11是疫苗注射方法流程图;
72.图12是六自由度协作机械臂运动到注射位姿的状态示意图。
73.图中符号说明:
74.1.轮式移动平台,1
‑
1.移动平台主控制器,2.六自由度协作机械臂,2
‑
1.末端法兰,3.无针头注射器,3
‑
1.手柄,3
‑
2.注射头,4.rgb
‑
d相机,5.六维力传感器,6.相机支架,7.生猪疫苗注射机器人;8.养猪场,9.圈舍,9
‑
1.饲养区域,9
‑
2.行人过道,10.进食槽,11.饮水槽,12.限位挡板,13.rfid耳标识别器,14.rfid电子耳标,15.上位机,16.机械臂控制器,17.网关,19.云平台,20.猪只。
具体实施方式
75.以下参照附图,以具体实施例对本发明作进一步详细说明。
76.如图1
‑
6所示,本发明公开的生猪疫苗注射机器人包括轮式移动平台1、六自由度协作机械臂2、无针头注射器3、rgb
‑
d相机4、六维力传感器5、相机支架6以及控制系统,轮式移动平台1采用公知的产品即可,六自由度协作机械臂2采用公知的产品即可(比如可以采
用艾利特机器人有限公司生产的ec66型号协作机械臂),六自由度协作机械臂2安装在轮式移动平台1的本体上,六维力传感器5安装在六自由度协作机械臂2的末端法兰上。无针头注射器3具体采用美国pulse needlefree system公司生产p250型号的无针头注射器,无针头注射器3设有手柄3
‑
1和注射头3
‑
2,注射头3
‑
2与手柄3
‑
1连接,手柄3
‑
1固定安装在六维力传感器的连接法兰上。相机支架6与六自由度协作机械臂2的末端连接,rgb
‑
d相机4固定安装在相机支架6上。图1所示生猪疫苗注射机器人的六自由度协作机械臂2处于收拢状态。
77.对于无针头注射器3,只要注射头3
‑
2接触猪的屁股(接触的同时施加一定压力)就喷射出疫苗药液,这是无针头注射器本身具有的功能。
78.轮式移动平台1由四轮独立驱动,每个轮子还能够独立转向,轮子由相应的电机进行驱动,该轮式移动平台既能保证疫苗机器人在养猪场中各个圈舍之间的走廊里快速移动,又能根据当前圈舍和目标圈舍之间的相对位置,任意调整驱动车轮的朝向等功能。轮式移动平台1的本体内设有移动平台主控制器1
‑
1、电机驱动器1
‑
2,电机驱动器1
‑
2与移动平台主控制器1
‑
1连接。
79.六自由度协作机械臂2具有防碰撞检测功能,可以防止疫苗注射过程中因机械臂运动速度过快,对猪只带来意外伤害。
80.如图7所示,控制系统包括上位机15、rfid电子耳标14、rfid耳标识别器13、机械臂控制器16、网关17、云平台19。机械臂控制器16安装在轮式移动平台1的本体内。rfid耳标识别器13通过网关17与云平台19通信,上位机15通过网关17与云平台19通信。机械臂控制器16与上位机15连接。六维力传感器5与上位机15连接,rgb
‑
d相机4与上位机15连接,轮式移动平台1上的移动平台主控制器1
‑
1与上位机15连接。上位机15放置在轮式移动平台1上。
81.如图8所示,养猪场8通过建造多个圈舍9,如图9所示,每一个圈舍9设置由猪栏围成的2列,每列4个,共8个面积相等的饲养区域9
‑
1,两列之间是行人过道9
‑
2。每个饲养区域9
‑
1中有进食槽10和饮水槽11。用限位挡板12将进食槽10和饮水槽隔离。如图10所示,rfid耳标识别器13安装在饮水槽11处,每个猪只20的耳朵上固定rfid电子耳标14。rfid电子耳标14中有唯一编号的id信息,以及位置信息,该位置信息是表示属于哪个圈舍,也就是圈舍的编号(打耳标的时候,会将耳标所在圈舍的编号录云平台)。
82.参考图11,下面介绍使用上述生猪疫苗注射机器人对猪只注射疫苗的方法。
83.步骤s101,圈舍9中每一个饲养区域9
‑
1的饮水槽11处的rfid耳标识别器13实时将从rfid电子耳标14采集到的id信息和位置信息通过wifi网络上传给云平台19。如图9和10所示,只有当猪只20到饮水槽11处喝水时,猪只20耳朵上的rfid电子耳标14中的id信息和位置信息才能被rfid耳标识别器13读取。
84.步骤s102,用遥控器将生猪疫苗注射机器人运动到任一圈舍9附近的等待位置,如图8所示,生猪疫苗注射机器人7运动到3号圈舍附近。此时的六自由度协作机械臂2处于如图1所示的初始位姿。
85.步骤s103,上位机15通过wifi网络访问云平台19,查询云平台19中的id信息和位置信息。
86.步骤s104,查询是否有猪只在喝水,查询到id信息和位置信息表示有猪只在喝水。如果没有猪只在饮水(查询不到id信息和位置信息),则返回步骤s103保持一定的频率访问云平台19。如果查询到猪只在某一饲养区域9
‑
1饮水(即查询到id信息和位置信息),则进入
步骤s105。
87.步骤s105,上位机15从云平台19获取待注射猪只的id信息和位置信息以及待注射疫苗信息,此时的位置信息代表目标圈舍的编号。待注射疫苗信息是事先存储在云平台中的。
88.步骤s106,上位机15发送运动控制指令(移动速度、移动时间、转向角度等)给轮式移动平台1的移动平台主控制器1
‑
1。
89.步骤s107,平台主控制器1
‑
1根据运动控制指令生成控制电机的pwm信号,并将pwm信号发送给轮式移动平台1的电机驱动器1
‑
2,电机驱动器1
‑
2驱动轮式移动平台中用于驱动轮子的电机工作,使轮式移动平台移动到目标圈舍内,如图12所示,轮式移动平台移动到猪只20附近,也就是说轮式移动平台移动到正在饮水的猪只旁边。由于六自由度协作机械臂2处于收拢状态,机器人在移动过程中,六自由度协作机械臂2不会与猪栏发生碰撞。
90.步骤s108,上位机访问云平台19查看是否仍有猪只在饮水,如果没有,那么上位机继续访问云平台,以查询饮水猪只情况;如果有猪只仍然在饮水(云平台19有id信息和位置信息),那么进入s109。
91.步骤s109,上位机给机械臂控制器16发送控制指令,机械臂控制器控制六自由度协作机械臂2从初始位姿(收拢状态)运动至猪侧身拍照位姿(该位姿下,整个猪侧身都能够呈现在rgb
‑
d相机4的视野中);
92.步骤s110,上位机控制rgb
‑
d相机对猪只的侧身进行拍照,以获得猪只的彩色图像和深度图像,并将图像信息发送给上位机。
93.步骤s111,上位机根据图像信息经过卷积神经网络算法识别猪只的侧身,并根据识别出的侧身中臀部的空间位置信息计算出臀部拍照位姿(该位姿下,相机能看到完整的猪臀部),进而通过机械臂逆运动学求解出六自由度协作机械臂2的6个关节的目标转动角度,然后将目标转动角度数据发送给机械臂控制器16。
94.步骤s112,上位机给机械臂控制器16发送控制指令,机械臂控制器16控制六自由度协作机械臂2的6个关节转动到目标转动角度,即六自由度协作机械臂2运动到猪臀部拍照位姿。
95.步骤s113,上位机控制rgb
‑
d相机对猪只的臀部进行拍照,以获得猪臀部的彩色图像和深度图像,并将图像信息发送给上位机。
96.步骤s114,上位机根据猪臀部的图像信息经过卷积神经网络算法识别猪臀部的可注射区域,选取可注射区域的中心位置坐标作为注射部位,中心位置的法向量作为无针头注射器的手柄的姿态,根据中心位置坐标和法向量计算出机械臂的注射位姿,进而通过机械臂逆运动学求解出六自由度协作机械臂2的6个关节的目标转动角度,然后将目标转动角度数据发送给机械臂控制器16。
97.步骤s115,机械臂控制器控制六自由度协作机械臂2的6个关节转动到目标转动角度,即六自由度协作机械臂2运动到注射位姿,如图12所示。
98.步骤s116,六维力传感器5检测无针头注射器3的手柄与猪只的臀部之间的接触力,判断六维力传感器5检测到的接触力是否大于设定的阈值,如果是则进入步骤s117,否则返回步骤s115。
99.步骤s117,机械臂控制器控制六自由度协作机械臂2继续前进运动一定时间,以补
偿猪只在被注射手柄接触后的应激反应带来的位姿误差。
100.步骤s118,机械臂控制器控制六自由度协作机械臂2先快速运动返回到猪臀部拍照位姿,然后快速返回到猪侧身拍照位姿,最后运动返回到初始位姿,至此完成注射动作。
101.步骤s119,机械臂到达初始位姿后,上位机通过网关向云平台反馈已注射猪只的id信息和疫苗信息。
102.如果继续进行疫苗的注射,那么上位机继续访问云平台以获取待注射猪只(饮水猪只)的id、待注射猪只位置和待注射疫苗信息,如果该饮水猪只已经注射过本疫苗,将自动排除改条信息,如果没有注射过本疫苗,将重复以上过程,完成该猪只的疫苗注射,直至完成所有猪只的疫苗注射工作。
103.需要说明的是,设置六维力传感器是优选的方案,机器人也可以不设置六维力传感器,直接将无针头注射器3的手柄3
‑
1固定安装在六自由度协作机械臂2的末端法兰上。这种结构下,上述注射过程就不需要步骤s116和步骤s117,机械臂控制器控制六自由度协作机械臂2运动到注射位姿,无针头注射器3的注射头3
‑
2就与猪只的屁股接触进而喷射疫苗药水。
104.以上所述仅对本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。