1.本发明涉及血管检测技术领域,尤其涉及一种基于马尔科夫随机场的血管检测方法。
背景技术:
2.随着计算机技术的不断发展,以及临床诊断技术的进步,医学图像处理得到了迅速的发展,医学图像处理技术作为一门新兴的学科和技术,在临床上的应用越来越广泛,而在医疗的静脉穿刺领域中,通常采用智能机器人辅助进行穿刺,此时,就需要一种方法可以准确的检测到血管所在区域,以便智能机器人进行穿刺。
技术实现要素:
3.本发明的目的是提供一种基于马尔科夫随机场的血管检测方法,该方法首先基于读取的二维超声实时灰度图像,搜索血管壁边界特征的感兴趣区域,随后再基于马尔科夫随机场对感兴趣区域图像构建模型,最后根据高斯分布的马尔科夫随机场模型分割图像,再对图像内的各类结果进行血管判定,即可准确检测到血管区域,简单高效。
4.为实现上述目的,采用以下技术方案:
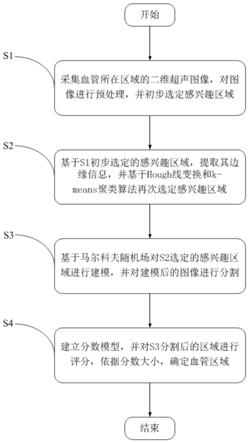
5.一种基于马尔科夫随机场的血管检测方法,包括以下步骤:
6.s1:采集血管所在区域的二维超声图像,对图像进行预处理,并初步选定感兴趣区域;
7.s2:基于s1初步选定的感兴趣区域,提取其边缘信息,并基于hough线变换和k
‑
means聚类算法再次选定感兴趣区域;
8.s3:基于马尔科夫随机场对s2选定的感兴趣区域进行建模,并对建模后的图像进行分割;
9.s4:建立分数模型,并对s3分割后的区域进行评分,依据分数大小,确定血管区域。
10.进一步地,所述s1中对图像进行预处理具体包括以下步骤:
11.s11:基于高斯滤波算法对图像进行降噪处理;
12.s12:基于otsu自适应阈值对降噪处理后的图像进行二值化;
13.s13:对二值化的图像进行形态学开运算,以消除图像中的奇异点。
14.进一步地,所述s2具体包括以下步骤:
15.s21:基于sobel算子提取感兴趣区域图像的边缘信息;
16.s22:基于hough线变换筛选出图像中斜率在175
°
~185
°
之间的若干直线,并计算直线与图像边缘的交点的纵坐标其中i为直线与图像边缘交点的横坐标最值;
17.s23:使用k=2的k
‑
means聚类算法对s22中所求的y进行聚类,得出直线与图像边缘相交的上、下边界的纵坐标,并基于该纵坐标,选定感兴趣区域。
18.进一步地,所述s3具体包括以下步骤:
19.s31:首先使用k=3的k
‑
means聚类算法建立初始标签分类,然后使用马尔科夫随机场对s2选定的感兴趣区域图像进行建模;
20.s32:依据贝叶斯公式计算后验概率,并基于后验概率,对建模后的图像进行分割。
21.进一步地,所述s32具体包括以下步骤:
22.s321:依据贝叶斯公式,建立后验概率公式其中,i为图像中的像素的灰度值,c为所属类别,p(i|c)为似然估计函数,p(c)先验概率,p(i)为像素分布概率,对于同一帧图像各个像素点的p(i)均相同,故判断所属像素点的类别,只需比较p(i|c)*p(c)即可;
23.s322:针对图像像素建立能量函数e(i,c)=argmax(log(p(c)) log(p(i|c)));
24.s323:基于上述公式及函数,使用k=2的k
‑
means聚类算法迭代更新像素点对应的类别,即可以得到两处类别区域。
25.进一步地,所述s321中的先验概率p(c)采用吉布斯分布函数计算得到,即
26.其中
[0027][0028]
且由此可以建立势能函数
[0029]
进一步地,所述s321中的似然估计函数p(i|c)采用采用高斯分布对其进行建模,即
[0030]
其中
[0031][0032]
n
c
为某种类别下图像中像素的个数,n为整个图像的像素个数,i为像素值。
[0033]
进一步地,所述s4具体包括以下步骤:
[0034]
s41:建立分数模型,其中,m1和m2分别为两个类别区域中像素点均值,θ
i
为各类别区域像素点标准差;
[0035]
s42:预设第一阈值,并基于s41中建立的分数模型,分别计算每一类别区域的得分,当得分大于第一阈值,则该类别区域即为包含血管的区域;
[0036]
s43:对s42中得到的包含血管的区域进行密度聚类,所得元素最多的区域即为血管区域。
[0037]
采用上述方案,本发明的有益效果是:
[0038]
该方法首先基于读取的二维超声实时灰度图像,搜索血管壁边界特征的感兴趣区域,随后再基于马尔科夫随机场对感兴趣区域图像构建模型,最后根据高斯分布的马尔科
夫随机场模型分割图像,再对图像内的各类结果进行血管判定,即可准确检测到血管区域,简单高效。
附图说明
[0039]
图1为本发明的流程性框图;
[0040]
图2为本发明的其中一实施例中,获取的二维超声图;
[0041]
图3为本发明的其中一实施例中,初步选定的感兴趣区域示意图;
[0042]
图4为本发明的其中一实施例中,对图像进行二值化处理后的示意图;
[0043]
图5为本发明的其中一实施例中,在图像中筛选出的若干直线的示意图;
[0044]
图6为本发明的其中一实施例中,再次选定的感兴趣区域的示意图;
[0045]
图7为本发明的其中一实施例中,对图像进行分割后的示意图;
[0046]
图8为本发明的其中一实施例中,最终确定的血管区域的示意图;
[0047]
其中,附图标识说明:
[0048]
1—血管。
具体实施方式
[0049]
以下结合附图和具体实施例,对本发明进行详细说明。
[0050]
参照图1至8所示,本发明提供一种基于马尔科夫随机场的血管检测方法,包括以下步骤:
[0051]
s1:采集血管1所在区域的二维超声图像,对图像进行预处理,并初步选定感兴趣区域;
[0052]
s2:基于s1初步选定的感兴趣区域,提取其边缘信息,并基于hough线变换和k
‑
means聚类算法再次选定感兴趣区域;
[0053]
s3:基于马尔科夫随机场对s2选定的感兴趣区域进行建模,并对建模后的图像进行分割;
[0054]
s4:建立分数模型,并对s3分割后的区域进行评分,依据分数大小,确定血管1区域。
[0055]
其中,所述s1中对图像进行预处理具体包括以下步骤:
[0056]
s11:基于高斯滤波算法对图像进行降噪处理;
[0057]
s12:基于otsu自适应阈值对降噪处理后的图像进行二值化;
[0058]
s13:对二值化的图像进行形态学开运算,以消除图像中的奇异点。
[0059]
所述s2具体包括以下步骤:
[0060]
s21:基于sobel算子提取感兴趣区域图像的边缘信息;
[0061]
s22:基于hough线变换筛选出图像中斜率在175
°
~185
°
之间的若干直线,并计算直线与图像边缘的交点的纵坐标其中i为直线与图像边缘交点的横坐标最值;
[0062]
s23:使用k=2的k
‑
means聚类算法对s22中所求的y进行聚类,得出直线与图像边缘相交的上、下边界的纵坐标,并基于该纵坐标,选定感兴趣区域。
[0063]
所述s3具体包括以下步骤:
[0064]
s31:首先使用k=3的k
‑
means聚类算法建立初始标签分类,然后使用马尔科夫随机场对s2选定的感兴趣区域图像进行建模;
[0065]
s32:依据贝叶斯公式计算后验概率,并基于后验概率,对建模后的图像进行分割。
[0066]
所述s32具体包括以下步骤:
[0067]
s321:依据贝叶斯公式,建立后验概率公式其中,i为图像中的像素的灰度值,c为所属类别,p(i|c)为似然估计函数,p(c)先验概率,p(i)为像素分布概率,对于同一帧图像各个像素点的p(i)均相同,故判断所属像素点的类别,只需比较p(i|c)*p(c)即可;
[0068]
s322:针对图像像素建立能量函数e(i,c)=argmax(log(p(c)) log(p(i|c)));
[0069]
s323:基于上述公式及函数,使用k=2的k
‑
means聚类算法迭代更新像素点对应的类别,即可以得到两处类别区域。
[0070]
所述s321中的先验概率p(c)采用吉布斯分布函数计算得到,即
[0071]
其中
[0072][0073]
且由此可以建立势能函数
[0074]
所述s321中的似然估计函数p(i|c)采用采用高斯分布对其进行建模,即
[0075]
其中
[0076][0077]
n
c
为某种类别下图像中像素的个数,n为整个图像的像素个数,i为像素值。
[0078]
所述s4具体包括以下步骤:
[0079]
s41:建立分数模型,其中,m1和m2分别为两个类别区域中像素点均值,θ
i
为各类别区域像素点标准差;
[0080]
s42:预设第一阈值,并基于s41中建立的分数模型,分别计算每一类别区域的得分,当得分大于第一阈值,则该类别区域即为包含血管1的区域;
[0081]
s43:对s42中得到的包含血管1的区域进行密度聚类,所得元素最多的区域即为血管1区域。
[0082]
本发明工作原理:
[0083]
继续参照图1至8所示,本发明提供了一种基于马尔科夫随机场的血管检测方法,该方法首先基于读取的二维超声实时灰度图像,搜索血管1壁边界特征的感兴趣区域,随后再基于马尔科夫随机场对感兴趣区域图像构建模型,最后根据高斯分布的马尔科夫随机场
模型分割图像,再对图像内的各类结果进行血管1判定,即可准确检测到血管1区域,可应用于智能机器人辅助静脉穿刺领域,保证其穿刺的准确性及可靠性,具体地:
[0084]
首先,需要对图像进行预处理,即通过实时图像采集卡获取超声设备采集的二维超声图像(如图2所示),随后,使用高斯滤波算法对图像进行降噪处理,去除因超声成像产生的图像噪点,并使得血管1轮廓清楚、平滑;初步选定初始感兴趣区域(如图3所示),此区域一般为图像的上半部分,也可根据临床经验根据实际患者情况选择;随后,使用otsu自适应阈值对降噪处理后的图像进行二值化,如图4所示,二值化可以消除图像内的背景噪声,使得血管1轮廓更加清晰,且otsu自适应阈值可以增加算法的鲁棒性;随后,对二值化的图像进行形态学开运算,可以消除图像中的奇异点,以降低奇异点对血管1边界识别的影响。
[0085]
然后,基于sobel算子提取感兴趣区域图像的边缘信息,随后,对上述图像进行hough线变换,可以得到极坐标系下直线到原点的距离ρ以及笛卡尔坐标系x轴与原点到直线夹角θ,通过夹角θ可筛选出图像中斜率在175
°
~185
°
之间的若干直线(如图5所示),随后计算直线与图像边缘的交点的纵坐标其中i为直线与图像边缘交点的横坐标最值;再使用k=2的k
‑
means聚类算法对上述所求的y进行聚类,得出直线与图像边缘相交的上、下边界的纵坐标,并基于该两个纵坐标,再次选定感兴趣区域(如图6所示)。
[0086]
然后,根据重新选定的感兴趣区域,裁切原始的图像,并使用k=3的k
‑
means聚类算法建立初始标签分类,然后使用马尔科夫随机场对选定的感兴趣区域图像进行建模,随后,依据贝叶斯公式,建立后验概率公式其中,i为图像中的像素的灰度值,c为所属类别,p(i|c)为似然估计函数,p(c)先验概率,p(i)为像素分布概率,对于同一帧图像各个像素点的p(i)均相同,故判断所属像素点的类别,只需比较p(i|c)*p(c)即可。
[0087]
因此,需要分别计算p(i|c)和p(c),对于p(c),可以使用吉布斯分布函数建模,即其中,
[0088][0089]
据此,可以建立势能函数
[0090]
而对于p(i|c),可以使用高斯分布对其进行建模,即
[0091]
其中,
[0092][0093]
n
c
为某种类别下图像中像素的个数,n为整个图像的像素个数,i为像素值。
[0094]
随后,针对图像像素建立能量函数e(i,c)=argmax(log(p(c)) log(p(i|c))),再基于上述的公式及函数,令k=2,基于k
‑
means聚类算法迭代更新各像素点对应的类别可以
得到两类分割结果(如图7所示)。
[0095]
然后,将上述分割两类结果的均值正序排序得到两组数据点集合c1和c2,建立分数模型
[0096]
其中,m1和m2分别为两个类别区域中像素点均值,θ
i
为各类别区域像素点标准差,预设第一阈值,并基于上述建立的分数模型,分别计算每一类别区域的得分,当得分大于第一阈值,则该类别区域即为包含血管1的区域,该实施例中,c1集合为包含血管1的集合,随后,对集合c1进行密度聚类,使用像素邻域参数∈=10和密度阈值η=30;初始给定数据集d中所有对象都被标记为“未访问”,随机选择一个未访问的对象p,标记p为“已访问”,并检查p的∈
‑
领域是否至少包含η个对象;如果不是,则p被标记为噪声点,否则为p创建一个新的簇c,并且把p的∈
‑
领域中所有对象都放在候选集合n中;迭代地把n中不属于其他簇的对象添加到c中,在此过程中,对应n中标记为“未访问”的对象p',并把它标记为“已访问”;检查p'的∈
‑
领域,如果p'的∈
‑
领域至少包含η个对象,则p'的∈
‑
领域中的对象都被添加到n中;继续添加对象到c,直到c不能扩展,即直到n为空,此时簇c完成生成,输出;从剩下的对象中随机选择一个未访问过的对象,聚类过程继续,直到所有对象都被访问,得到n个簇c为聚类结果;上述聚类结果中包含元素最多的簇c
m
为最终血管1检测结果,血管1坐标为类c
m
的中心,结果如图8所示。
[0097]
以上仅为本发明的较佳实施例而已,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

