1.本发明涉及被动微波遥感技术领域,特别是指一种被动卫星遥感洪涝信息的成图方法及装置。
背景技术:
2.被动微波遥感大范围、全天候、高频次的观测特点以及其对地表水体和土壤湿度的敏感性,在全球和区域尺度洪涝信息反演上,可以发挥其他遥感数据源不可替代的作用,理应是全球和区域尺度洪涝信息反演的有效数据源。但由于其空间分辨率较粗,使得以洪涝信息定量化反演为目的研究受到极大的限制,这方面的研究一直没有得到足够重视。近几年来,微波遥感技术在空间分辨率和探测灵敏度上迅速发展,我国在风云三号卫星上搭载了微波成像仪(microwave radiometer imager
‑
mwri),为我们深入开展被动微波遥感洪涝信息定量化反演研究提供了机遇。
3.上个世纪80年代末到90年代初开展了利用多通道扫描微波辐射计smmr(scanning multichannel microwave radiometer),特种微波成像仪ssm/i(special sensor microwave/image)等被动微波遥感数据反演洪涝信息的算法研究。近些年来,这方面的研究在算法上改进不大,只是应用到一些不同的数据上,如微波探测器amsr
‑
e(advanced microwave scanning radiometer for eos)、微波探测装置atmu(advanced microwave sounding unit)等。分析原因,主要是由于被动微波遥感空间分辨率较粗,且传感器对地表水体和土壤湿度都敏感,使得如何利用被动微波遥感资料定量描述洪涝信息问题没有研究清楚。
技术实现要素:
4.本发明提供了一种被动微波遥感洪涝信息的成图方法及装置。实现了被动微波遥感技术对洪涝信息的超分辨率的成图效果。
5.为解决上述技术问题,本发明的实施例提供以下方案:
6.一种被动微波遥感洪涝信息的成图方法,所述方法包括:
7.获取被动卫星遥感资料的水体亮温值和陆地亮温值;
8.根据所述水体亮温值和所述陆地亮温值,得到水体分量信息;
9.根据所述水体分量信息,通过子流域尺度水体分量差异分析,得到洪水面积信息;
10.根据所述洪水面积信息,生成超分辨率的成图信息。
11.可选的,获取被动微波遥感资料的水体亮温值和陆地亮温值,包括:
12.获取空间域信息、光谱域信息以及时间域信息;
13.根据所述空间域信息、光谱域信息以及时间域信息,得到被动微波遥感资料的水体亮温值和陆地亮温值。
14.可选的,根据所述水体亮温值和所述陆地亮温值,得到水体分量信息,包括:
15.获取卫星在瞬时视场角ifov观测到的混合像元亮温值;
16.根据所述混合像元亮温值、所述水体亮温值和所述陆地亮温值,得到水体分量信息。
17.可选的,根据所述混合像元亮温值、所述水体亮温值和所述陆地亮温值,得到水体分量信息,包括:
18.根据所述混合像元亮温值、所述水体亮温值和所述陆地亮温值,通过公式得到水体分量信息;其中wsf为水体分量信息,t
bifov
为混合像元亮温值,t
bwater
为水体亮温值,t
bland
为陆地亮温值。
19.可选的,根据所述水体分量信息,通过子流域尺度水体分量差异分析,得到洪水面积信息,包括:
20.获取洪涝发生前子流域尺度的平均水体分量信息和洪涝发生后子流域尺度的平均水体分量信息;
21.根据所述洪涝发生前子流域尺度的平均水体分量信息和洪涝发生后子流域尺度的平均水体分量信息,得到洪水面积信息。
22.可选的,根据所述洪涝发生前子流域尺度的平均水体分量信息和洪涝发生后子流域尺度的平均水体分量信息,得到洪水面积信息,包括:
23.根据所述洪涝发生前子流域尺度的平均水体分量信息和洪涝发生后子流域尺度的平均水体分量信息,通过公式:
24.f
wat_a
‑
f
wat_b
≈f
wat_a
‑
f
wat_b
=a
flo
计算得到洪水面积信息;
25.其中,f
wat_a
为洪涝发生后的平均水体分量信息,f
wat_b
为洪涝发生前的平均水体分量信息,f
wat_a
为洪涝发生后的水体面积信息,f
wat_b
为洪涝发生前的水体面积信息,a
flo
为洪水面积信息。
26.可选的,根据所述洪水面积信息,生成超分辨率的成图信息,包括:
27.获取模拟洪水面积信息;
28.根据所述洪水面积信息和所述模拟洪水面积信息,生成超分辨率的成图信息。
29.可选的,获取模拟洪水面积信息,包括:
30.通过公式计算得到模拟洪水面积信息;其中,a
flo模拟
为模拟洪水面积信息,h
s
为水位高度的计量单位,a(h
s
)是水位每升高一个计量单位h
s
所增加的洪涝水体面积,min_h
s
,是水体表面的高程,max_h
s
是洪涝的最大水位。
31.本发明提供一种被动微波遥感洪涝信息的成图装置,所述装置包括:
32.获取模块,用于获取被动微波遥感资料的水体亮温值和陆地亮温值;
33.处理模块,用于根据所述水体亮温值和所述陆地亮温值,得到水体分量信息;根据所述水体分量信息,通过子流域尺度水体分量差异分析,得到洪水面积信息;根据所述洪水面积信息,生成超分辨率的成图信息。
34.本发明还提供一种计算机可读存储介质,包括指令,当所述指令在计算机上运行时,使得计算机执行如上述的方法。
35.本发明的上述方案至少包括以下有益效果:
36.本发明的上述方案,通过获取被动微波遥感的水体亮温值和陆地亮温值;根据所述水体亮温值和所述陆地亮温值,得到水体分量信息;根据所述水体分量信息,通过子流域尺度水体分量差异分析,得到洪水面积信息;根据所述洪水面积信息,生成超分辨率的成图信息。本发明的方案解决了被动微波遥感技术由于空间分辨率较粗使其在洪涝信息定量化反演研究受到很大限制的问题,实现了被动微波遥感技术对洪涝信息的超分辨率的成图效果。
附图说明
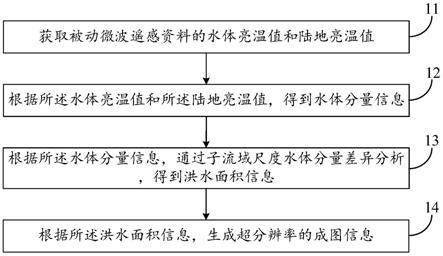
37.图1为本发明实施例的被动卫星遥感洪涝信息的成图的流程示意图;
38.图2为本发明实施例的被动卫星遥感洪涝信息的成图方法中洪涝灾害发生前的wsf图;
39.图3为本发明实施例的被动卫星遥感洪涝信息的成图方法中洪涝灾害发生后的wsf图;
40.图4为本发明实施例的被动卫星遥感洪涝信息的成图方法中洪涝信息超分辨率成图的结果示意图;
41.图5为本发明的具体的实施例的流程示意图;
42.图6为本发明实施例的被动卫星遥感洪涝信息的成图装置的模块示意图。
具体实施方式
43.下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本发明而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本发明,并且能够将本发明的范围完整的传达给本领域的技术人员。
44.如图1所示,本发明提供一种被动微波遥感洪涝信息的成图方法,所述方法包括:
45.步骤11,获取被动微波遥感资料的水体亮温值和陆地亮温值;
46.步骤12,根据所述水体亮温值和所述陆地亮温值,得到水体分量信息;
47.步骤13,根据所述水体分量信息,通过子流域尺度水体分量差异分析,得到洪水面积信息;
48.步骤14,根据所述洪水面积信息,生成超分辨率的成图信息。
49.该实施例中,通过获取被动微波遥感资料的水体亮温值和陆地亮温值,得到水体分量信息,这里的水体分量信息优选的为通过水体表面占比wsf(water surface fraction)方法计算得到,水体分量信息是水体的面积,即一个像元中水体的面积的大小;根据水体分量信息,通过子流域尺度水体分量差异分析,得到洪水面积信息,生成超分辨率的成图信息;实现了被动微波遥感技术对洪涝信息的超分辨率的成图效果。
50.本发明一可选的实施例中,步骤11包括:
51.步骤111,获取空间域信息、光谱域信息以及时间域信息;
52.步骤112,根据所述空间域信息、光谱域信息以及时间域信息,得到被动微波遥感资料的水体亮温值和陆地亮温值。
53.本实施例中,通过空间域信息、光谱域信息以及时间域信息,优选的可以利用邻近
像元窗口搜索方法,得到水体亮温值和陆地亮温值。
54.具体地,邻近像元窗口搜索方法为从n*n大小窗口的邻近像元中找到一组可用于计算端元值的备选像元(n=3,5,7,
…
,2n
‑
1),其中,n为正整数,备选的像元个数必须满足一定的数量i值。
55.需要说明的是,水体亮温值和陆地亮温值分别为被动微波遥感技术在洪涝信息监测过程中的水体端元和陆地端元;被动微波遥感技术在洪涝监测中的混合像元问题会限制监测信息的精度,其中,混合像元是指遥感图像中一个像元内包含几种地物的信息;端元为一个像元内仅包含一种地物的像元,同时该地物称为典型地物。
56.具体地,空间域信息优选的可以利用距离加权和土地类型相似度加权规则,对于陆地的端元的选择,尽量选择距离河流、湖泊等水体远的区域样本;同时选择研究区内待计算水体分量的区域与端元样本区域土地利用相似度较高的区域;
57.基于混合像元的特征,本技术中的水体亮温值和陆地亮温值优选的可以通过获取空间域信息、光谱域信息以及时间域信息进一步得到;其中,光谱域信息优选的可以利用不同频谱通道对典型地物的响应差异特性,一个具体的实施例中,对于微波探测器amsr
‑
e资料选择了37ghz通道为主;对于微波成像仪mwri资料,选择36.5ghz通道为主,当然在云层影响较小的情况下,也可以用89ghz通道资料;对于跨轨道微波扫描仪atms资料,选择50.3和51.76ghz通道;对于卫星smap资料,经过比较分析选择h极化单通道方法进行分析,得到光谱域信息;时间域信息优选的可以利用洪涝发生前后同一地区被动微波遥感测得的信号的变化信息,选择洪涝风险小、灾害发生前后预设时间段内的亮温值或者指数值变化不大的区域作为陆地端元样本的统计区域,得到时间域信息。
58.需要说明的是,水体亮温值和陆地亮温值这两个端元值还可以通过pri(polarization ratio index)极化比值指数来确定。
59.本发明一可选的实施例中,步骤12包括:
60.步骤121,获取卫星在瞬时视场角ifov观测到的混合像元亮温值;
61.步骤122,根据所述混合像元亮温值、所述水体亮温值和所述陆地亮温值,得到水体分量信息。
62.本实施例中,根据混合像元亮温值、水体亮温值和陆地亮温值,得到水体分量信息;其中,混合像元亮温值是由于被动微波遥感技术所得到的遥感图像中像元的光谱特征并不是单一地物的光谱特征,而是几种地物光谱特征的混合反映,由于不同的地物具有不同的辐射特性,因此混合像元的辐射特性与单一的像元的辐射特性不同;需要对混合像元进行分解,对混合像元中的端元的组分占像元的百分含量进行求得,以使得对混合像元分解出的像元的分类将更精确。对混合像元进行分解不仅能给出组成像元的各地表覆盖类的丰度,还能给出其分类的图像,对于一幅图像而言,分解后的混合像元的效果优于传统的分类方法。
63.这里,对混合像元进行分解优选的可利用线性光谱混合模型进行分解,具体的,利用线性关系表达遥感系统中一个像元内各地物的类型、比例与地物的光谱响应,该线性光谱混合模型中,像元在某一光谱波段的反射率是由构成像元的基本组分的反射率及其所占像元面积的比例为权重系数的线性组合。在图像中,已知有n种端元,且已知各种端元的光谱反射率,则线性光谱混合模型为:
64.且0≤f
k
≤1;
65.其中,r
i
是波段i上混合像元的反射率,其中,i为正整数;f
k
是第k种端元组分在混合像元中所占的比例,其中,k为正整数;r
i,k
是i波段上第k种端元的反射率,ε
i
是i波段上拟合误差。利用最小二乘法使ε
i
的值最小,然后得到每个端元的面积百分比图像。
66.本发明一可选的实施例中,步骤122包括:
67.步骤1221,根据所述混合像元亮温值、所述水体亮温值和所述陆地亮温值,通过公式得到水体分量信息;其中wsf为水体分量信息,t
bifov
为混合像元亮温值,t
bwater
为水体亮温值,t
bland
为陆地亮温值。
68.本实施例中的公式是基于对混合像元进行分解的原理上,将在洪涝信息反演中设每个被动微波遥感像元的亮温值是在水体亮温值和陆地亮温值的共同作用下的,可表示为公式:
69.t
bifov
=t
bwater
wsf t
bland
(1
‑
wsf);
70.其中,wsf为水体分量信息,t
bifov
为混合像元亮温值,t
bwater
为水体亮温值,t
bland
是陆地亮温值,通过公式变换,得到公式
71.下面对获取水体分量信息wsf的模型构建进行具体的实施例说明:
72.amsr
‑
e(先进的微波扫描辐射计)搭载在地球观测系统(eos)下午星系列第一颗卫星aqua卫星上。amsr
‑
e是多频率、双极化微波辐射计,与先前的smmr和smm/i辐射计相比,有更多的通道(6.19~89ghz,共12个通道),更高的空间分辨率,它既有smmr具有的较低的工作频率波段的优点,也有smm/i的较高空间分辨率的优点。卫星运行在太阳同步轨道,aqua卫星每天2次过境,过境时间分别为当地时间下午13:30前后和凌晨1:30前后。在垂直于传感器飞行轨道方向的扫描角度为61
°
,扫描宽度为1445km。amsr
‑
e传感器的波段参数如表1所示:
[0073][0074][0075]
表1
[0076]
这里,基于对pri极化比值指数的研究,选择波长36.5ghz垂直极化通道和水平极
化通道,计算36.5ghz的极化比值指数。36.5ghz的极化比值指数为:
[0077][0078]
其中,tb
36.5v
为36.5ghz的通道的v极化亮温值,tb
36.5h
为36.5ghz的通道的h极化亮温值,pri
36.5
为36.5ghz的极化比值指数;
[0079]
由于卫星amsr
‑
e的空间分辨率为10km,通过将混合像元进行线性分解,利用pri极化比值指数计算得到水体分量信息wsf:
[0080][0081]
其中,pri
l
为陆地端元值(即步骤122中的陆地亮温值),pri
w
为水体端元值(即步骤122中的水体亮温值),wsf
pri
为基于陆地端元值pri
l
和水体端元值pri
w
估算得到的一个像元内水体面积百分比(即步骤122中的水体分量信息)。
[0082]
如图2至图4所示,一个具体的实施例中,针对第一地区和第二地区南部的部分地区流域洪涝灾害的卫星amsr
‑
e进行处理分析,图2是洪涝灾害发生前的wsf图;图3是洪涝灾害发生后的wsf图;图4是洪涝信息超分辨率成图的结果,可见,超分辨率洪涝空间分布图反映出了更加精细化的洪涝信息。
[0083]
本发明一可选的实施例中,步骤13包括:
[0084]
步骤131,获取洪涝发生前子流域尺度的平均水体分量信息和洪涝发生后的子流域尺度的平均水体分量信息;
[0085]
步骤132,根据所述洪涝发生前子流域尺度的平均水体分量信息和洪涝发生后子流域尺度的平均水体分量信息,得到洪水面积信息。
[0086]
本实施例中,通过子流域尺度水体分量差异分析的方法得到了洪水面积信息。被动微波遥感技术的发射信号对水体、表层土壤湿度等信息敏感,因此步骤12中求得的水体分量信息wsf方法估算的水体信息f
wat
包括水体面积信息、土壤湿度信息以及植被信息,具体的由公式体现为:
[0087]
f
wat
=f
wat
f
soi
f
veg
;
[0088]
其中,f
wat
为水体分量信息,即上述步骤1221中的水体分量信息wsf,f
wat
为实际水体对水体分量信息f
wat
的贡献值,f
soi
是土壤湿度对水体分量信息f
wat
的贡献值,f
veg
是植被对水体分量信息f
wat
的贡献值。
[0089]
本发明一可选的实施例中,步骤133包括:
[0090]
步骤1331,根据所述洪涝发生前子流域尺度的平均水体分量信息和洪涝发生后子流域尺度的平均水体分量信息,通过公式:
[0091]
f
wat_a
‑
f
wat_b
≈f
wat_a
‑
f
wat_b
=a
flo
计算得到洪水面积信息;
[0092]
其中,f
wat_a
为洪涝发生后的平均水体分量信息,f
wat_b
为洪涝发生前的平均水体分量信息,f
wat_a
为洪涝发生后的水体面积信息,f
wat_b
为洪涝发生前的水体面积信息,在忽略洪涝发生前后土壤湿度和植被变化影响的情况下,f
wat_a
≈f
wat_a
,f
wat_b
≈f
wat_b
。a
flo
为洪水面积信息。
[0093]
本实施例,基于洪涝发生前后的被动微波遥感信息的水体分量变化进行检测,为
了减少大气和云层等因素的影响,使用洪涝发生前后的多个时次数据的平均水体分量信息作为灾前背景数据,根据公式:
[0094]
f
wat_a
‑
f
wat_b
=(f
wat_a
f
soi_a
f
veg_a
)
‑
(f
wat_b
f
soi_b
f
veg_b
)
[0095]
=(f
wat_a
‑
f
wat_b
) (f
soi_a
‑
f
soi_b
) (f
veg_a
‑
f
veg_b
);
[0096]
=(f
wat_a
‑
f
wat_b
) ε
soi
ε
veg
[0097]
其中,f
wat_a
是洪涝发生后的平均水体分量信息,f
wat_b
是洪涝发生前的平均水体分量信息,f
wat_a
是洪涝发生后的水体面积对水体分量信息f
wat_a
的贡献值,f
soi_a
是洪涝发生后的土壤湿度对水体分量信息f
wat_a
的贡献值,f
veg_a
是洪涝发生后的植被对水体分量信息f
wat_a
的贡献值,ε
soi
和ε
veg
是植被和土壤湿度的差异;当洪涝发生前后的时间间隔较短的情况下,土壤湿度的变化对水体分量的影响远小于洪涝水体变化对水体分量产生的影响,同时植被的变化影响也很小,因此洪涝发生前后的时间间隔较短的情况下ε
soi
和ε
veg
的值接近于0,可以得到公式:f
wat_a
‑
f
wat_b
≈f
wat_a
‑
f
wat_b
=a
flo
;实现了通过洪涝发生前后两个时次的差值计算,在一定程度上消除了大气的影响和植被阴影的影响。
[0098]
本发明一可选的实施例中,步骤14包括:
[0099]
步骤141,获取模拟洪水面积信息;
[0100]
步骤142,根据所述洪水面积信息和所述模拟洪水面积信息,生成超分辨率的成图信息。
[0101]
具体地,步骤141,包括:
[0102]
步骤1411,通过公式计算得到模拟洪水面积信息;其中,a
flo模拟
为模拟洪水面积信息,h
s
为水位高度的计量单位,a(h
s
)是水位每升高一个计量单位h
s
所增加的洪涝水体面积,min_h
s
,是水体表面的高程,max_h
s
是洪涝的最大水位。
[0103]
本实施例中,通过设洪涝水体是按照高程从最低处向高处分布的,即在一个流域内的洪涝水体的分布,先是要填充地势低的地方,再从低到高,按照高程的变化进行展布,具体的数学表达式为:
[0104][0105]
需要说明的是,a
flo模拟
的结果的空间分辨率优选的由数字高程模型数据决定,实现了百米级、十米级等不同分辨率的超分辨率洪涝信息成图方法。
[0106]
如图5所示,一个具体的实施例中,通过被动微波遥感技术获取被动微波典型地物样本数据,并建立典型地物亮温查找表,通过对水体和土壤温度对像元尺度亮温变化量进行特征分析,根据特征分析的结果对特征通道进行选择与wsf的构建;通过亚像元尺度的洪涝信息进行估算,根据估算的结果对水体端元值和陆地端元值进行确定,通过子流域尺度水体分量差异分析,地表水体空间展布模型,得到洪涝信息超分辨率的成图结果;其中对水体端元值和陆地端元值进行确定是通过研究区域土地利用数据、降水数据、数字高程模型dem数据、河流湖泊等信息,基于空间域、时间域以及光谱域对端元值进行确定。
[0107]
本发明方案的实施例,通过获取水体亮温值和陆地亮温值;根据所述水体亮温值和所述陆地亮温值,得到水体分量信息;根据所述水体分量信息,通过子流域尺度水体分量差异分析,得到洪水面积信息;根据所述洪水面积信息,生成超分辨率的成图信息;实现了
被动微波遥感技术对洪涝信息的超分辨率的成图效果。
[0108]
如图6所示,本发明的实施例还提供一种被动微波遥感洪涝信息的成图装置60,所述装置60包括:
[0109]
获取模块61,用于获取被动微波遥感资料的水体亮温值和陆地亮温值;
[0110]
处理模块62,用于根据所述水体亮温值和所述陆地亮温值,得到水体分量信息;根据所述水体分量信息,通过子流域尺度水体分量差异分析,得到洪水面积信息;根据所述洪水面积信息,生成超分辨率的成图信息。
[0111]
可选的,获取被动微波遥感资料的水体亮温值和陆地亮温值,包括:
[0112]
获取空间域信息、光谱域信息以及时间域信息;
[0113]
根据所述空间域信息、光谱域信息以及时间域信息,得到被动微波遥感资料的水体亮温值和陆地亮温值。
[0114]
可选的,根据所述水体亮温值和所述陆地亮温值,得到水体分量信息,包括:
[0115]
获取卫星在瞬时视场角ifov观测到的混合像元亮温值;
[0116]
根据所述混合像元亮温值、所述水体亮温值和所述陆地亮温值,得到水体分量信息。
[0117]
可选的,根据所述混合像元亮温值、所述水体亮温值和所述陆地亮温值,得到水体分量信息,包括:
[0118]
根据所述混合像元亮温值、所述水体亮温值和所述陆地亮温值,通过公式得到水体分量信息;其中wsf为水体分量信息,t
bifov
为混合像元亮温值,t
bwater
为水体亮温值,t
bland
为陆地亮温值。
[0119]
可选的,根据所述水体分量信息,通过子流域尺度水体分量差异分析,得到洪水面积信息,包括:
[0120]
获取洪涝发生前子流域尺度的平均水体分量信息和洪涝发生后子流域尺度的平均水体分量信息;
[0121]
根据所述洪涝发生前子流域尺度的平均水体分量信息和洪涝发生后子流域尺度的平均水体分量信息,得到洪水面积信息。
[0122]
可选的,根据所述洪涝发生前子流域尺度的平均水体分量信息和洪涝发生后子流域尺度的平均水体分量信息,得到洪水面积信息,包括:
[0123]
根据所述洪涝发生前子流域尺度的平均水体分量信息和洪涝发生后子流域尺度的平均水体分量信息,通过公式:
[0124]
f
wat_a
‑
f
wat_b
≈f
wat_a
‑
f
wat_b
=a
flo
计算得到洪水面积信息;
[0125]
其中,f
wat_a
为洪涝发生后的平均水体分量信息,f
wat_b
为洪涝发生前的平均水体分量信息,f
wat_a
为洪涝发生后的水体面积信息,f
wat_b
为洪涝发生前的水体面积信息,a
flo
为洪水面积信息。
[0126]
可选的,根据所述洪水面积信息,生成超分辨率的成图信息,包括:
[0127]
获取模拟洪水面积信息;
[0128]
根据所述洪水面积信息和所述模拟洪水面积信息,生成超分辨率的成图信息。
[0129]
可选的,获取模拟洪水面积信息,包括:
[0130]
通过公式计算得到模拟洪水面积信息;其中,a
flo模拟
为模拟洪水面积信息,h
s
为水位高度的计量单位,a(h
s
)是水位每升高一个计量单位h
s
所增加的洪涝水体面积,min_h
s
,是水体表面的高程,max_h
s
是洪涝的最大水位。
[0131]
需要说明的是,该装置60是与上述被动微波遥感洪涝信息的成图方法实施例对应的装置,上述方法实施例中的所有实现方式均适用于该装置60的实施例中,也能达到相同的技术效果。
[0132]
本发明的实施例还提供一种计算机可读存储介质,包括指令,当所述指令在计算机上运行时,使得计算机执行如上所述的方法。上述方法实施例中的所有实现方式均适用于该实施例中,也能达到相同的技术效果。
[0133]
本领域普通技术人员可以意识到,结合本文中所公开的实施例描述的各示例的单元及算法步骤,能够以电子硬件、或者计算机软件和电子硬件的结合来实现。这些功能究竟以硬件还是软件方式来执行,取决于技术方案的特定应用和设计约束条件。专业技术人员可以对每个特定的应用来使用不同方法来实现所描述的功能,但是这种实现不应认为超出本发明的范围。
[0134]
所属领域的技术人员可以清楚地了解到,为描述的方便和简洁,上述描述的系统、装置和单元的具体工作过程,可以参考前述方法实施例中的对应过程,在此不再赘述。
[0135]
在本发明所提供的实施例中,应该理解到,所揭露的装置和方法,可以通过其它的方式实现。例如,以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,例如多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
[0136]
所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
[0137]
另外,在本发明各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。
[0138]
所述功能如果以软件功能单元的形式实现并作为独立的产品销售或使用时,可以存储在一个计算机可读取存储介质中。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分或者该技术方案的部分可以以软件产品的形式体现出来,该计算机软件产品存储在一个存储介质中,包括若干指令用以使得一台计算机设备(可以是个人计算机,服务器,或者网络设备等)执行本发明各个实施例所述方法的全部或部分步骤。而前述的存储介质包括:u盘、移动硬盘、rom、ram、磁碟或者光盘等各种可以存储程序代码的介质。
[0139]
此外,需要指出的是,在本发明的装置和方法中,显然,各部件或各步骤是可以分解和/或重新组合的。这些分解和/或重新组合应视为本发明的等效方案。并且,执行上述系
列处理的步骤可以自然地按照说明的顺序按时间顺序执行,但是并不需要一定按照时间顺序执行,某些步骤可以并行或彼此独立地执行。对本领域的普通技术人员而言,能够理解本发明的方法和装置的全部或者任何步骤或者部件,可以在任何计算装置(包括处理器、存储介质等)或者计算装置的网络中,以硬件、固件、软件或者它们的组合加以实现,这是本领域普通技术人员在阅读了本发明的说明的情况下运用他们的基本编程技能就能实现的。
[0140]
因此,本发明的目的还可以通过在任何计算装置上运行一个程序或者一组程序来实现。所述计算装置可以是公知的通用装置。因此,本发明的目的也可以仅仅通过提供包含实现所述方法或者装置的程序代码的程序产品来实现。也就是说,这样的程序产品也构成本发明,并且存储有这样的程序产品的存储介质也构成本发明。显然,所述存储介质可以是任何公知的存储介质或者将来所开发出来的任何存储介质。还需要指出的是,在本发明的装置和方法中,显然,各部件或各步骤是可以分解和/或重新组合的。这些分解和/或重新组合应视为本发明的等效方案。并且,执行上述系列处理的步骤可以自然地按照说明的顺序按时间顺序执行,但是并不需要一定按照时间顺序执行。某些步骤可以并行或彼此独立地执行。
[0141]
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

