1.本发明涉及输电铁塔组立施工技术领域,尤其涉及一种悬浮抱杆倾斜度阈值实时测算方法及系统。
背景技术:
2.近年来,随着我国输电线路建设的不断发展,输电线路电压等级不断提高,输电铁塔的施工难度也随之提升。特别是在山区、大跨越的工况下,铁塔组立施工安全面临着巨大的挑战。悬浮式悬浮抱杆分解组塔是在复杂工况下最常用的组塔方法,而悬浮抱杆倾斜度是悬浮式悬浮抱杆分解组塔全过程中最为关键的参量。
3.当前悬浮抱杆倾斜度阈值由设计人员经验决定,设计人员综合多年的施工经验并根据塔型的不同通常取10
°
或15
°
,但这种凭经验选取阈值的方法会给组塔施工带来一些问题。当阈值取过小时,会导致在起吊某些特殊塔片时因悬浮抱杆倾斜度过低而无法正常起吊;当阈值取过大时,会导致在某些危险受力情况时因悬浮抱杆允许的倾斜角度过大而造成安全事故。因此,如何科学合理地根据不同起吊情况确定悬浮抱杆倾斜度阈值,避免完全依靠设计人员经验而带来的施工安全隐患,是当前输电线路建设行业亟待解决的问题。
4.目前,未有文献对铁塔施工中悬浮抱杆倾斜度阈值进行过相关研究,大多都仅对铁塔组立过程中悬浮抱杆倾斜度进行实时监测,并设置预警功能。然而预警阈值都依据设计人员凭经验拟定的一个固定值,无法根据施工过程进行动态变化,难以保证铁塔施工安全稳定地进行。
技术实现要素:
5.本发明提供一种悬浮抱杆倾斜度阈值实时测算方法及系统,解决了当前组塔施工中悬浮抱杆倾斜度阈值仅凭施工人员经验而定、阈值无法根据施工进度实时动态变化的问题,提升了组塔施工安全性。
6.本发明采取的技术方案为:
7.一种悬浮抱杆倾斜度阈值实时测算方法,在铁塔组立施工过程中,以竖直状态下悬浮抱杆所处位置为中轴线z轴,以四根塔腿中海拔最低的塔腿所处水平面为xy面,其中:以顺线路方向为x轴,横线路方向为y轴,建立组塔系统的三维空间力系;在1根起吊绳、1根牵引绳、4根拉线、4根承托绳上分别安装1个拉力倾角集成传感器,用于测量各绳索的拉力和倾角,并在悬浮抱杆顶部安装1个高度倾角集成传感器,用于测量悬浮抱杆工作高度和倾斜度;同时,以这些传感器为标签节点,收集任一时刻各标签节点数据,包括高度、倾角、力的大小和方向,从而得到这一时刻组塔系统关键点的三维空间力系;最后,以与悬浮抱杆倾斜度相关的拉线拉力、承托绳拉力以及悬浮抱杆压力三个指标为依据,令上述3个指标在任一时刻都不大于工程允许最大值,从而将解算后的悬浮抱杆倾斜度实时控制在安全范围之内,实现悬浮抱杆倾斜度阈值实时测算。
8.一种悬浮抱杆倾斜度阈值实时测算方法,
9.计算涉及的参数值如下:
10.α——在顺线路投影面上,起吊绳对铅垂线的夹角,单位:
°
;
11.ζ——在顺线路投影面上,悬浮抱杆对铅垂线的倾角,单位:
°
;
12.η——起吊绳张力p与牵引绳张力的合力r与起吊绳张力p之间的夹角,单位:
°
;
13.ρ——在平衡侧悬浮抱杆拉线平面上,拉线对两固定点连线的夹角,单位:
°
;
14.τ——在顺线路投影面上,牵引绳对水平面的夹角,单位:
°
;
15.——在顺线路投影面上,平衡侧拉线合力线对水平面的夹角,单位:
°
;
16.r——起吊绳张力p与牵引绳张力的合力,单位:kn;
17.p——起吊绳张力,单位:kn;
18.——牵引绳张力,单位:kn;
19.n
e
——悬浮抱杆轴心允许压力,单位:kn;
20.n——起吊绳与牵引绳滑车的滑轮数;
21.l——悬浮抱杆全度,单位:m;
22.l1——已组塔身顶端节点平面以上的悬浮抱杆长度,单位:m;
23.l2——已组塔身顶端节点平面以下的悬浮抱杆长度,单位:m;
24.d2——已组塔身顶端节点处的塔身宽度,单位:m;
25.h1——悬浮抱杆顶部距地面距离,单位:m;
26.h2——已组塔身距地面距离,单位:m;
27.h3——悬浮抱杆底部距地面距离,单位:m;
28.c——在两侧悬浮抱杆拉线平面上,两拉线与主材联结点之间距离的一半,单位:m;
29.g0——悬浮抱杆自重,单位:kn;
30.s
e
——拉线的额定拉断力,单位:kn;
31.v
e
——承托绳的额定拉断力,单位:kn;
32.k——绳索安全系数,根据具体工程而定;
33.k1——绳索动荷载系数,根据具体工程而定;
34.k2——绳索不平衡系数,根据具体工程而定。
35.测算方法包括以下步骤:
36.步骤1、在以悬浮抱杆竖直状态下所处位置为中轴线为z轴,以四根塔腿中海拔最低的塔腿所处水平面为xy面,其中以顺线路方向为x轴,横线路方向为y轴,建立组塔系统的三维空间坐标系。在已组铁塔的1根起吊绳、1根牵引绳、4根拉线、4根承托绳处分别安装1个拉力倾角集成传感器,并分别标记为a,b,c1、c2、c3、c4,d1、d2、d3、d4节点,并在悬浮抱杆1安装一个高度倾角传感器,记为节点e;
37.步骤2、根据铁塔施工图纸和所测量悬浮抱杆工作高度,实时获取各传感器节点的三维空间坐标,再加上对各节点力的大小和方向的测量数据,最终获得各节点的空间三维力系坐标:
38.a节点:f
a
(x
a
,y
a
,z
a
)、
39.b节点:f
b
(x
b
,y
b
,z
b
)、
40.c1节点:f
c1
(x
c1
,y
c1
,z
c1
)、
41.c2节点:f
c2
(x
c2
,y
c2
,z
c2
)、
42.c3节点:f
c3
(x
c3
,y
c3
,z
c3
)、
43.c4节点:f
c4
(x
c4
,y
c4
,z
c4
)、
44.d1节点:f
d1
(x
d1
,y
d1
,z
d1
)、
45.d2节点:f
d2
(x
d2
,y
d2
,z
d2
)、
46.d3节点:f
d3
(x
d3
,y
d3
,z
d3
)、
47.d4节点:f
d4
(x
d4
,y
d4
,z
d4
)。
48.其中,f代表节点力的大小和方向,是一个矢量,(x,y,z)代表力的方向坐标。由于a和b节点代表起吊绳和牵引绳上的传感器,无法通过铁塔图纸获得具体传感器坐标,仅能通过传感器测量的倾角数据获知传感器节点所处方向,因此(x
a
,y
a
,z
a
)、(x
b
,y
b
,z
b
)仅代表单位坐标向量,不代表实际传感器坐标位置。
49.为更好地说明如何获取三维力系坐标,取a节点和c1节点进行说明。
50.现用a节点进行说明,设铁塔组立某一时刻起吊绳上传感器拉力数据记为f
a
,起吊绳上双轴倾角传感器的中轴线与在yz平面上的倾斜度分量的夹角为χ1,中轴线与在xz平面上的倾斜度分量的夹角为χ2,设沿起吊绳方向的单位长度为m,则通过空间坐标关系可计算出:
[0051][0052]
则此时刻,a节点的三维力系坐标为:
[0053][0054]
同理,可得出b节点的三维力系坐标。
[0055]
现用c1节点进行说明,设铁塔组立某一时刻拉线上传感器拉力数据记为f
c1
,已组塔身顶端节点处的塔身宽度记为d2,已组塔身高度记为h2,d2和h2均通过施工图纸录入,则通过空间坐标关系可得出:
[0056][0057]
则此时刻,c1节点的三维力系坐标为同理可得出c2、c3、c4、d1、d2、d3、d4节点三维力系坐标。
[0058]
步骤3、在某一时刻,以拉线实际受力不得超过拉线额定拉断力的1/k为依据,其中k为根据具体工程规定的安全系数,得到悬浮抱杆倾斜度满足以下要求:
[0059][0060]
其中:ξ1为常数,s
e
、k、k1、k2根据不同的工程参数录入,α、η、ρ、r均可通过各节点的空间三维力系坐标求得。
[0061]
为更好地说明如何利用三维力系坐标求得上述参量,取参量r进行说明。r表示起吊绳张力(a节点)与牵引绳张力(b节点)的合力,已知a节点的三维力系坐标为f
a
(x
a
,y
a
,z
a
)、b节点的三维力系坐标为f
b
(x
b
,y
b
,z
b
),两节点的力作用于同一点,根据三维力系合力计算公式,可知r的大小为:
[0062][0063]
则可知r的三维力系坐标为:r(x
a
x
b
,y
a
y
b
,z
a
z
b
)。同理可得出α、η、ρ、的值。
[0064]
在录入s
e
、k、k1、k2的数据,求得α、η、ρ、r的值后,可得到关于悬浮抱杆倾斜度ξ的阈值范围1,记为:ξ≤ξ1。其中ξ1为悬浮抱杆倾斜度的阈值1。
[0065]
步骤4、同样的,在任一时刻,以承托绳实际受力不得超过承托绳额定拉断力的1/k为依据,其中k为根据具体工程规定的安全系数,得到悬浮抱杆倾斜度满足以下要求:
[0066][0067][0068][0069][0070]
记为ξ≤ξ2[0071]
其中:ξ2为常数,v
e
、k、k1、k2、d2、c根据不同的工程参数录入,l2、α、η、r均可通过
各节点的空间三维坐标系求得。
[0072]
为更好地说明如何得到上述参量,取参量l2进行说明。l2表示已组塔身顶端节点平面以下的悬浮抱杆长度,在顺线路方向上,已知传感器测得高度h1,已组塔身距地面距离h2,悬浮抱杆全长l,悬浮抱杆倾角ξ,根据三维空间坐标关系,可得已组塔身顶端节点平面以下的悬浮抱杆长度l2为:
[0073][0074]
α、η、r的值可根据s3同理得出。在录入v
e
、k、k1、k2、d2、c的数据,求得l2、α、η、r的值后,可得到关于悬浮抱杆倾斜度ξ的阈值范围2,记为:ξ≤ξ2。其中ξ2为悬浮抱杆倾斜度的阈值2。
[0075]
步骤5、同样的,在任一时刻,以悬浮抱杆所受实际压力不得超过悬浮抱杆轴心允许压力n
e
为依据,得到悬浮抱杆倾斜度满足以下要求:
[0076][0077]
其中:ξ3为常数,n
e
根据不同的工程参数录入,α、η、r均可通过各节点的空间三维坐标系求得。
[0078]
为更好地说明如何利用三维力系坐标求得上述参量,取参量η进行说明。η为起吊绳张力p与牵引绳张力的合力r与起吊绳张力p之间的夹角,根据s3可知,r的三维力系坐标为:r(x
a
x
b
,y
a
y
b
,z
a
z
b
),起吊绳p的三维力系坐标为:f
a
(x
a
,y
a
,z
a
),悬浮抱杆顶点的坐标为:(0,0,h1),则根据空间3点组成空间2条线的夹角可知,η的大小为:
[0079][0080]
α、η、r可由s3、s4同理得出。在录入n
e
的数据,求得α、η、r的值后,可得到关于悬浮抱杆倾斜度ξ的阈值范围3,记为:ξ≤ξ3。其中ξ3为悬浮抱杆倾斜度的阈值3。
[0081]
综合公式(3)、(5)、(7),可得到悬浮抱杆倾斜度阈值满足:
[0082]
ξ=min[ξ1,ξ2,ξ3]。
[0083]
一种悬浮抱杆倾斜度阈值实时测算系统,该系统包括:
[0084]
全方位感知设备、通信网络、智能云服务终端;
[0085]
所述全方位感知设备包括:
[0086]
分别安装在1根起吊绳、1根牵引绳、4根拉线、4根承托绳上的拉力倾角集成传感器;
[0087]
安装在悬浮抱杆顶部的高度倾角集成传感器;
[0088]
所述拉力倾角集成传感器,用于测量各绳索的拉力和倾角;
[0089]
所述高度倾角集成传感器,用于测量悬浮抱杆工作高度和悬浮抱杆倾斜度;
[0090]
所述全方位感知设备还包括第一mcu模块、第二mcu模块、第一无线通信模块、第二无线通信模块;
[0091]
拉力倾角集成传感器、高度倾角集成传感器分别连第一mcu模块、第二mcu模块,第一mcu模块、第二mcu模块分别连接第一无线通信模块、第二无线通信模块;
[0092]
第一无线通信模块和第二无线通信模块与智能云服务终端之间通过通信网络传输数据;智能云服务终端,用于对数据进行处理,并通过对悬浮抱杆倾斜度阈值进行实时判断,对于超过阈值的数据进行报警。
[0093]
本发明一种悬浮抱杆倾斜度阈值实时测算方法及系统,技术效果如下:
[0094]
1)、解决了当前组塔施工中悬浮抱杆倾斜度阈值仅凭施工人员经验而定、阈值无法根据施工进度实时动态变化的问题,悬浮抱杆倾斜度阈值实时测算方法及其装置对组塔过程中悬浮抱杆的倾斜度进行实时监测分析,实现悬浮抱杆倾斜度的实时监测预警。
[0095]
2)、本发明提供一种悬浮抱杆倾斜度阈值实时测算方法。通过分析组塔系统中各关键节点的三维空间力系坐标,结合分布在组塔系统中的各传感器监测数据,利用各关键点受力精确计算公式,实时测算悬浮抱杆倾斜度是否满足要求,确保监测数据准确性。
[0096]
3)、本发明提供一种悬浮抱杆倾斜度阈值实时测算系统,通过将拉力采集模块与倾角采集模块集成于同一传感器、将高度采集模块和倾角采集模块集成于同一传感器,减少了传感器数量,降低了系统使用难度,实现对现场施工人员的友好操作。
[0097]
4)、本发明提供一种悬浮抱杆倾斜度阈值实时测算系统,通过采用最适宜组塔工程的lora无线通信技术,实现组塔施工野外复杂工况下数据高效稳定传输。通过预设程序对悬浮抱杆倾斜度进行实时判断和报警,实现危险提前获知,极大提升了组塔施工安全性。
附图说明
[0098]
图1为本发明中一种悬浮抱杆倾斜度阈值实时测算装置的传感器安装位置示意图。
[0099]
图2为本发明中获取a节点三维力系坐标示意图。
[0100]
图3为本发明中获取c1节点三维力系坐标示意图。
[0101]
图4为本发明中获取r节点三维力系坐标示意图。
[0102]
图5为本发明中获取l2节点三维力系坐标示意图。
[0103]
图6为本发明中获取η大小的示意图。
[0104]
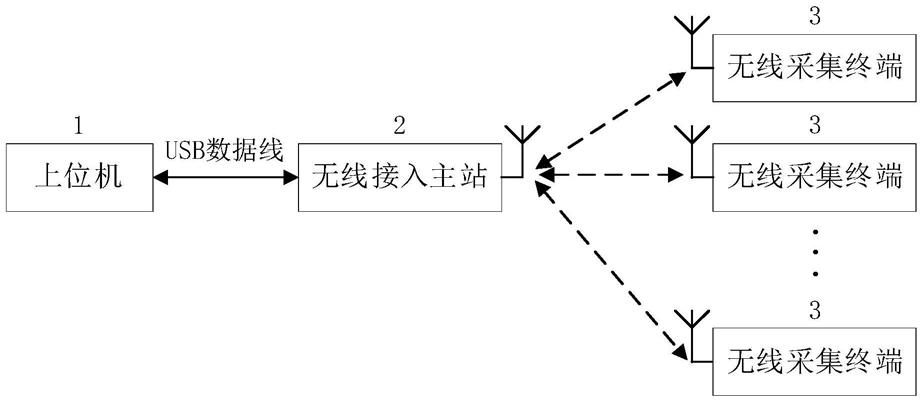
图7为本发明中一种悬浮抱杆倾斜度阈值实时测算装置的整体结构示意图。
[0105]
图中,悬浮抱杆1,塔腿2,起吊绳3,牵引绳4,拉线5,承托绳6,拉力倾角集成传感器7,高度倾角集成传感器8,全方位感知设备9,第一mcu模块10,第二mcu模块11,第一无线通信模块12,第二无线通信模块13,通信网络14,智能云服务终端15,第三无线通信模块16,第三mcu模块17。
具体实施方式
[0106]
实施例1:
[0107]
如图1所示,所述一种悬浮抱杆倾斜度阈值实时测算方法,包括以下步骤:
[0108]
在铁塔组立施工过程中,以竖直状态下悬浮抱杆1所处位置为中轴线z轴,以四根塔腿2中海拔最低的塔腿所处水平面为xy面,其中以顺线路方向为x轴,横线路方向为y轴,建立组塔系统的三维空间力系。在1根起吊绳3、1根牵引绳4、4根拉线5、4根承托绳6上分别
安装1个拉力倾角集成传感器7,用于测量各绳索的拉力和倾角,并在悬浮抱杆顶部安装1个高度倾角集成传感器8,用于测量悬浮抱杆工作高度和倾斜度。同时,以这11个传感器为标签节点,收集任一时刻各标签节点数据(包括高度、倾角、力的大小和方向),从而得到这一时刻组塔系统关键点的三维空间力系。最后以与悬浮抱杆1倾斜度相关的拉线3拉力、承托绳6拉力以及悬浮抱杆1压力三个指标为依据,令上述3个指标在任一时刻都不大于工程允许最大值,从而将解算后的悬浮抱杆1倾斜度实时控制在安全范围之内,实现悬浮抱杆1倾斜度阈值实时测算。
[0109]
计算涉及的参数值如下:
[0110]
α——在顺线路投影面上,起吊绳对铅垂线的夹角,单位:
°
;
[0111]
ζ——在顺线路投影面上,悬浮抱杆对铅垂线的倾角,单位:
°
;
[0112]
η——起吊绳张力p与牵引绳张力的合力r与起吊绳张力p之间的夹角,单位:
°
;
[0113]
ρ——在平衡侧悬浮抱杆拉线平面上,拉线对两固定点连线的夹角,单位:
°
;
[0114]
τ——在顺线路投影面上,牵引绳对水平面的夹角,单位:
°
;
[0115]
——在顺线路投影面上,平衡侧拉线合力线对水平面的夹角,单位:
°
;
[0116]
r——起吊绳张力p与牵引绳张力的合力,单位:kn;
[0117]
p——起吊绳张力,单位:kn;
[0118]
——牵引绳张力,单位:kn;
[0119]
n
e
——悬浮抱杆轴心允许压力,单位:kn;
[0120]
n——起吊绳与牵引绳滑车的滑轮数;
[0121]
l——悬浮抱杆全度,单位:m;
[0122]
l1——已组塔身顶端节点平面以上的悬浮抱杆长度,单位:m;
[0123]
l2——已组塔身顶端节点平面以下的悬浮抱杆长度,单位:m;
[0124]
d2——已组塔身顶端节点处的塔身宽度,单位:m;
[0125]
h1——悬浮抱杆顶部距地面距离,单位:m;
[0126]
h2——已组塔身距地面距离,单位:m;
[0127]
h3——悬浮抱杆底部距地面距离,单位:m;
[0128]
c——在两侧悬浮抱杆拉线平面上,两拉线与主材联结点之间距离的一半,单位:m;
[0129]
g0——悬浮抱杆自重,单位:kn;
[0130]
s
e
——拉线的额定拉断力,单位:kn;
[0131]
v
e
——承托绳的额定拉断力,单位:kn;
[0132]
k——绳索安全系数,根据具体工程而定;
[0133]
k1——绳索动荷载系数,根据具体工程而定;
[0134]
k2——绳索不平衡系数,根据具体工程而定;
[0135]
s1:在以悬浮抱杆1竖直状态下所处位置为中轴线为z轴,以四根塔腿2中海拔最低的塔腿所处水平面为xy面,其中以顺线路方向为x轴,横线路方向为y轴,建立组塔系统的三
维空间力系后,在已组铁塔的1根起吊绳3、1根牵引绳4、4根拉线5、4根承托绳6上分别安装1个安装拉力倾角集成传感器7,并分别标记为a,b,c1、c2、c3、c4,d1、d2、d3、d4节点,并在悬浮抱杆内部安装一个高度倾角传感器8,记为e。
[0136]
s2:根据铁塔施工图纸和所测量悬浮抱杆工作高度,可实时获取各传感器节点的三维空间坐标,再加上对各节点力的大小和方向的测量数据,最终可获得各节点的空间三维力系坐标:a:f
a
(x
a
,y
a
,z
a
)、b:f
b
(x
b
,y
b
,z
b
)、c1:f
c1
(x
c1
,y
c1
,z
c1
)、c2:f
c2
(x
c2
,y
c2
,z
c2
)、c3:f
c3
(x
c3
,y
c3
,z
c3
)、c4:f
c4
(x
c4
,y
c4
,z
c4
)、d1:f
d1
(x
d1
,y
d1
,z
d1
)、d2:f
d2
(x
d2
,y
d2
,z
d2
)、d3:f
d3
(x
d3
,y
d3
,z
d3
)、d4:f
d4
(x
d4
,y
d4
,z
d4
)。其中,f代表节点力的大小和方向,是一个矢量,(x,y,z)代表力的方向坐标。由于a和b节点代表起吊绳3和牵引绳4上的传感器,无法通过铁塔图纸获得具体传感器坐标,仅能通过传感器测量的倾角数据获知传感器节点所处方向,因此(x
a
,y
a
,z
a
)、(x
b
,y
b
,z
b
)仅代表单位坐标向量,不代表传感器实际坐标位置
[0137]
具体地,如图2所示,为更好地说明如何获取三维力系坐标,取a节点和c1节点进行说明。
[0138]
现用a节点进行说明,设铁塔组立某一时刻起吊绳4上传感器7拉力数据记为f
a
,起吊绳4上双轴倾角传感器的中轴线与在yz平面上的倾斜度分量的夹角为χ1,中轴线与在xz平面上的倾斜度分量的夹角为χ2,设沿起吊绳4方向的单位长度为m,则通过空间坐标关系可计算出:
[0139][0140]
则此时刻,a节点的三维力系坐标为:
[0141][0142]
同理,可得出b节点三维力系坐标。
[0143]
具体地,如图3所示,现用c1节点进行说明,设铁塔组立某一时刻拉线5上传感器7拉力数据记为f
c1
,已组塔身顶端节点处的塔身宽度记为d2,已组塔身高度记为h2,d2和h2均根据施工进度,通过施工图纸录入,则通过空间坐标关系可得出:
[0144]
[0145]
则此时,c1节点的三维力系坐标为同理可得出c2、c3、c4、d1、d2、d3、d4节点三维力系坐标。
[0146]
s3:在某一时刻,以拉线5实际受力不得超过拉线5额定拉断力的1/k为依据,其中k为根据具体工程规定的安全系数,得到悬浮抱杆1倾斜度应满足以下要求:
[0147][0148]
其中:ξ1为常数,s
e
、k、k1、k2根据不同的工程参数录入,α、η、ρ、r均可通过各节点的空间三维力系坐标求得。
[0149]
具体地,如图4所示,为更好地说明如何利用三维力系坐标求得上述参量,取参量r进行说明。r表示起吊绳3张力(a节点)与牵引绳4张力(b节点)的合力,已知a节点的三维力系坐标为f
a
(x
a
,y
a
,z
a
)、b节点的三维力系坐标为f
b
(x
b
,y
b
,z
b
),两节点的力作用于同一点,根据三维力系合力计算公式,可知r的大小为:
[0150][0151]
则可知r的三维力系坐标为:r(x
a
x
b
,y
a
y
b
,z
a
z
b
)。同理可得出α、η、ρ、的值。
[0152]
在录入s
e
、k、k1、k2的数据,求得α、η、ρ、r的值后,可得到关于悬浮抱杆倾斜度ξ的阈值范围1,记为:ξ≤ξ1。其中ξ1为悬浮抱杆倾斜度的阈值1。
[0153]
s4:同样的,在任一时刻,以承托绳6实际受力不得超过承托绳6额定拉断力的1/k为依据,其中:k为根据具体工程规定的安全系数,得到悬浮抱杆1倾斜度应满足以下要求:
[0154][0155][0156][0157][0158]
记为ξ≤ξ2[0159]
其中:ξ2为常数,其中v
e
、k、k1、k2、d2、c根据不同的工程参数录入,l2、α、η、r均可通过各节点的空间三维坐标系求得。
[0160]
如图5所示,为更好地说明如何得到上述参量,取参量l2进行说明。l2表示已组塔身顶端节点平面以下的悬浮抱杆1长度,在顺线路方向上,已知传感器8测得高度h1,已组塔身距地面距离h2,悬浮抱杆1全长l,悬浮抱杆1倾角ξ,根据三维空间坐标关系,可得已组塔身顶端节点平面以下的悬浮抱杆长度l2为:
[0161][0162]
α、η、r的值可根据s3同理得出。在录入v
e
、k、k1、k2、d2、c的数据,求得l2、α、η、r的值后,可得到关于悬浮抱杆倾斜度ξ的阈值范围2,记为:ξ≤ξ2。其中ξ2为悬浮抱杆倾斜度的阈值2。
[0163]
s5:同样的,在任一时刻,以悬浮抱杆1所受实际压力不得超过悬浮抱杆1轴心允许压力n
e
为依据,得到悬浮抱杆倾斜度应满足以下要求:
[0164][0165]
其中,ξ3为常数,其中,n
e
根据不同的工程参数录入,α、η、r均可通过各节点的空间三维坐标系求得。
[0166]
具体地,如图6所示,为更好地说明如何利用三维力系坐标求得上述参量,取参量η进行说明。η为起吊绳3张力p与牵引绳4张力的合力r与起吊绳3张力p之间的夹角,根据s3可知,r的三维力系坐标为:r(x
a
x
b
,y
a
y
b
,z
a
z
b
),起吊绳p的三维力系坐标为:f
a
(x
a
,y
a
,z
a
),悬浮抱杆1顶点的坐标为:(0,0,h1),则根据空间3点组成空间2条线的夹角可知,η的大小为:
[0167][0168]
α、η、r可由s3、s4同理得出。在录入n
e
的数据,求得α、η、r的值后,可得到关于悬浮抱杆倾斜度ξ的阈值范围3,记为:ξ≤ξ3。其中ξ3为悬浮抱杆倾斜度的阈值3。
[0169]
综合公式(3)、(5)、(7),可得到悬浮抱杆1倾斜度阈值应满足:
[0170]
ξ=min[ξ1,ξ2,ξ3]
ꢀꢀꢀ
(9)
[0171]
如图7所示,一种悬浮抱杆倾斜度阈值实时测算系统,该系统包括:
[0172]
全方位感知设备9、通信网络14、智能云服务终端15;
[0173]
所述全方位感知设备9包括:
[0174]
分别安装在1根起吊绳3、1根牵引绳4、4根拉线5、4根承托绳6上的拉力倾角集成传感器7;
[0175]
安装在悬浮抱杆1顶部的高度倾角集成传感器8;
[0176]
所述拉力倾角集成传感器7,用于测量各绳索的拉力和倾角;
[0177]
所述高度倾角集成传感器8,用于测量悬浮抱杆1工作高度和悬浮抱杆1倾斜度;
[0178]
所述全方位感知设备9还包括第一mcu模块10、第二mcu模块11、第一无线通信模块12、第二无线通信模块13;
[0179]
拉力倾角集成传感器7、高度倾角集成传感器8分别连接第一mcu模块10、第二mcu模块11,第一无线通信模块12、第二无线通信模块13分别连接第一无线通信模块12、第二无线通信模块13;
[0180]
第一无线通信模块12、第二无线通信模块13与智能云服务终端15之间通过通信网
络14传输数据;
[0181]
智能云服务终端15,用于对数据进行处理,并通过对悬浮抱杆1倾斜度阈值进行实时判断,对于超过阈值的数据进行报警。
[0182]
其中:第一无线通信模块12、第二无线通信模块13用于处理采集到的数据,第一无线通信模块12、第二无线通信模块13用于发送处理完成后的数据。
[0183]
通信网络14指采用lora无线通信技术自组建无线局域网。所述lora无线通信技术包括分别安装在全方位感知设备9内部和智能云服务终端15的第一无线通信模块12、第二无线通信模块13、第三无线通信模块16,用于无线发送和接收组塔施工数据。
[0184]
智能云服务终端15采用lora无线通信模块接收组塔施工数据,内部采用第三mcu模块17对数据进行处理,并通过程序对悬浮抱杆倾斜度阈值进行实时判断,对于超过阈值的数据进行报警。
[0185]
拉力倾角集成传感器7采用电阻应变式拉力传感器与固体摆式双轴倾角传感器集成。答:高度倾角集成传感器8采用气压式高度传感器与固体摆式双轴倾角传感器集成。
[0186]
第一mcu模块10采用stc系列的stc12le5616ad芯片。
[0187]
第一无线通信模块12采用900hp芯片。
[0188]
智能云服务终端15采用支持usb串口接入,并含有vb软件的pc电脑即可。
[0189]
为兼容通信数据传输,第二无线通信模块16同样采用900hp芯片。
[0190]
为方便系统运行能够整体化管理,第二mcu模块17同样采用stc系列的stc12le5616ad芯片。
[0191]
为兼容通信数据传输,第三无线通信模块16同样采用900hp芯片。
[0192]
为方便系统运行能够整体化管理,第三mcu模块17同样采用stc系列的stc12le5616ad芯片。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。