1.本发明涉及穿戴式机器人的具体应用领域,具体地说,涉及一种基于外骨骼的穿戴式走步健身系统及其控制方法与可读计算机存储介质。
背景技术:
2.行走散步作为一种较为有效且健康的锻炼方式,越来越受到推崇,为此,人们通过开发出适于在室内进行走步健身的设备,以更好的满足锻炼人员的需求,例如在公开号为cn108066939a的专利文献公开了一种全能原地散步机。
3.此外,还通过对散步机的结构进行改进,以更好地保护锻炼人员,例如在公开号为cn108057211a的专利文献中公开了一种原地散步机支架,其通过设置支架而能有效的满足大病初愈的人和老年人的室内走步健身需求。也有产品通过对散步板的结构进行改进,以达到更好的减震,而保护膝盖、脚踝,而减少落地缓冲压力。
4.如前述等的现有技术,虽然能有效地满足走步健身人员的室内散步需求,且容易让锻炼人员轻松地走出大量的散步数量,通常都会轻松过万;但是走步太多容易对关节造成损伤,通常建议行走六千步至一万步为佳,但是走步的步数太少,又难以达到一些减肥者的需求,且对腿部肌肉的锻炼效果受到打折;此外,还存在散步姿势不正确等问题。
技术实现要素:
5.本发明的主要目的是提供一种基于外骨骼的穿戴式走步健身系统的控制方法,能在有限的散步步数内,提高运动能量的消耗,以在确保运动安全的前提下,提高运动健身效果;
6.本发明的另一目的是提供一种存有用于实现上述控制方法的计算机程序的计算机可读存储介质;
7.本发明的再一目的是提供一种基于外骨骼的穿戴式走步健身系统,以使穿戴者能在有限的散步步数内,提高运动能量的消耗,以在确保运动安全的前提下,提高运动健身效果。
8.为了实现上述主要目的,本发明提供控制方法适用于穿戴在走步健身人员的身上的走步健身系统,且该走步健身系统基于穿戴式外骨骼,该外骨骼包括腰部穿戴单元、大腿杆单元及用于连接前述二者的髋关节单元;大腿杆单元包括大腿杆与大腿绑带;髋关节单元包括关节驱动电机,关节驱动电机用于驱使大腿杆相对腰部穿戴单元摆动;该控制方法具体包括以下步骤:
9.监测数据接收步骤,在走步健身人员的走步健身过程中,接收关节监测传感器所输出的监测数据,监测数据包括大腿杆在走步健身过程中的髋关节角度θ(t)与髋关节角速度ω(t);
10.数据预处理步骤,按下式将基于时间序列的髋关节角度θ(t)与髋关节角速度ω(t)变换成基于时间序列的相角占比基于该相角占比在[0,2π)范围的周期变
化特性,对不同步幅不同步速的髋关节角度与髋关节角速度数据进行分割处理,以获取大腿杆在步态各个周期内的摆动相区间和支撑相区间;
[0011][0012]
走步阻力施加步骤,在摆动相区间内,依据走步阻力与大腿杆的摆幅及摆动角速度变化率呈正相关的设定,按照对应时间序列构建走步阻力与相角占比的关系曲线;并按照关系曲线,控制关节驱动电机对处于摆动相区间内的大腿杆的摆动过程施加反向的走步阻力。
[0013]
在上述技术方案中,通过设置而区分出摆动相与支撑相之后,再对其阻力进行设置,从而能够在有限的散步步数内,提高运动能量的消耗,以在确保运动安全的前提下,而提高运动健身效果。
[0014]
具体的方案为走步阻力与大腿杆的摆幅及摆动角速度变化率的设定为:
[0015]
τ
i
=λ
·
k
·
τ
pre
[0016]
其中,τ
i
为相角占比阶段的期望阻力矩,τ
pre
为预设最大人体走路阻力矩,λ是髋关节屈伸角速度修正系数,k是髋关节角度修正系数,分别为:
[0017][0018][0019]
其中,ω
min
,ω
m
,ω分别为人体在走步健身过程中的一个周期内髋关节屈伸角速度设定最小值、设定平均值以及实际采集值;θ
min
,θ
m
,θ分别为人体在走步健身过程中的一个周期内髋关节角度设定最小值、设定平均值以及实际采集值。在该技术方案将走步阻力与大腿杆的摆幅及摆动角速度变化率设置为前式,能进一步地提高运动健身效果。
[0020]
更具体的方案为不同相角占比时的预设阻力矩τ
pre
按照下表,以查表方式获取经归一化之后的值:
[0021][0022]
其中,预设阻力矩τ
pre
为按照力矩/体重作归一化处理后的值,在经查表之后,再根据不同走步健身人员的体重计算实际预设阻力矩。该技术方案能有效地提高计算速度。
[0023]
为了实现上述另一目的,本发明提供的计算机可读存储介质存储有用于对穿戴式走步健身系统进行控制的计算机程序,当计算机程序被执行时,能实现上述任一技术方案所描述的控制方法。
[0024]
为了实现上述再一目的,本发明提供的穿戴式走步健身系统基于外骨骼,该外骨骼穿戴于走步健身人员身上,包供电电池、控制单元及自上而下依次连接的腰部穿戴单元、髋关节单元与大腿杆单元;大腿杆单元包括大腿杆与大腿绑带;髋关节单元包括用于连接大腿杆与腰部穿戴单元的关节驱动电机,及用于获取大腿杆在穿戴人员走步健身过程中的髋关节角度θ(t)与髋关节角速度ω(t);关节驱动电机用于驱使大腿杆相对腰部穿戴单元摆动;控制单元用于依据监测传感器所输出的监测数据,控制关节驱动电机至少对处于摆动相区间内的的大腿杆的摆动过程施加反向的走步阻力,且摆动阻力与大腿杆的摆幅及摆动角速度变化率呈正相关。
[0025]
具体的方案为前述控制单元用于按下式将基于时间序列的髋关节角度θ(t)与髋关节角速度ω(t)变换成基于时间序列的相角占比基于该相角占比在[0,2π)范围的周期变化特性,对不同步幅不同步速的髋关节角度与髋关节角速度数据进行分割处理,以获取大腿杆在步态各个周期内的摆动相区间和支撑相区间;
[0026][0027]
在摆动相区间内,依据走步阻力与大腿杆的摆幅及摆动角速度变化率呈正相关的设定,按照对应时间序列构建走步阻力与相角占比的关系曲线;并按照关系曲线,控制关节驱动电机对处于摆动相区间内的大腿杆的摆动过程施加反向的走步阻力。
[0028]
更具体的方案为走步阻力与大腿杆的摆幅及摆动角速度变化率的设定为:
[0029]
τ
i
=λ
·
k
·
τ
pre
[0030]
其中,τ
i
为相角占比阶段的期望阻力矩,τ
pre
为预设最大人体走路阻力矩,λ是髋关节屈伸角速度修正系数,k是髋关节角度修正系数,分别为:
[0031][0032][0033]
其中,ω
min
,ω
m
,ω分别为人体在走步健身过程中的一个周期内髋关节屈伸角速度设定最小值、设定平均值以及实际采集值;θ
min
,θ
m
,θ分别为人体在走步健身过程中的一个周期内髋关节角度设定最小值、设定平均值以及实际采集值。
[0034]
进一步的方案为不同相角占比时的预设阻力矩τ
pre
按照下表,以查表方式获取经归一化之后的值:
[0035][0036][0037]
其中,预设阻力矩τ
pre
为按照力矩/体重作归一化处理后的值,在经查表之后,再根据不同走步健身人员的体重计算实际预设阻力矩。
附图说明
[0038]
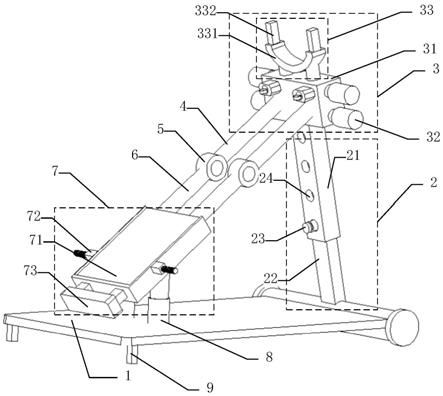
图1为本发明实施例中外骨骼的结构图;
[0039]
图2为本发明实施例中外骨骼对穿戴者在行走过程中施加的摆动阻力力矩的示意图;
[0040]
图3为本发明实施例中所监测获取的髋关节角度与髋关节角速度的曲线图;
[0041]
图4为本发明实施例中所构建出的相角曲线;
[0042]
图5为本发明实施例中所构建出的阻力曲线。
具体实施方式
[0043]
以下结合实施例及其附图对本发明作进一步说明。
[0044]
在下述实施例中,主要通过穿戴式外骨骼构建供锻炼人员穿戴的走步健身系统,即将原本为用于为穿戴者提供助力的外骨骼系统改造成能在摆动相时提供阻力,以使散步锻炼人员在安全行走步数内能达到更多的体能锻炼消耗,对于外骨骼的结构可根据现有产品进行设计,并不局限于下述实施例的结构。
[0045]
实施例
[0046]
本发明穿戴式走步健身系统基于如图1所示的外骨骼1,该外骨骼1包括供电电池模块10、控制模块、腰部穿戴单元、大腿绑定单元及用于连接腰部穿戴单元与大腿绑定单元
的髋关节屈曲/伸展驱动单元;大腿绑定单元包括大腿杆30及大腿绑带31,在大腿杆30的下端部上布设有位姿传感器11,该位姿传感器11在助力过程中向控制模块输出位姿检测数据,具体包括髋关节角度数据与髋关节角速度数据;髋关节屈曲/伸展驱动单元包括摆动驱动电机4,用于驱使大腿杆30相对腰部穿戴单元前后摆动,从而为穿戴者的步行提供摆动阻力,以能在有限的步数内消耗更多的能量,从而达到更好的锻炼效果。
[0047]
腰部穿戴单元包括为板式结构的背部支架及与该背部支架固连的胸部绑带21与腰部绑带22,供电电池模块10固设在胸部绑带与腰部绑带之间,并位于穿戴者腹部区域前侧,而控制单元的电路板等布设在背部支架上。
[0048]
在背部支架的两侧端部上,分别通过髋关节内收/外展关节机构与髋关节内收/外展关节机构而对应地铰接有l型连接臂53与l型连接臂54。对于l型连接臂的具体结构,在相对背部支架20的主体结构时,该l型连接臂先朝外延伸,再朝前折弯而具有位于腰部穿戴单元2两侧上的固连部530与固连部540;大腿杆30通过髋关节屈曲/伸展驱动单元而固定在固连部530与固连部540上,且使髋关节屈曲/伸展驱动单元的关节轴线与髋关节内收/外展关节机构的关节轴线相交于人体髋关节中心位置处。
[0049]
在工作过程中,关节驱动电机4用于驱使大腿杆30摆动,而利用大腿绑带31绑定在穿戴者的大腿上而提供摆动助力或摆动阻力,即髋关节单元包括用于连接大腿杆30与腰部穿戴单元的关节电机,该关节驱动电机4至少用于驱使大腿杆30相对腰部穿戴单元摆动,该关节电机在穿戴者行走锻炼的过程中的具体控制方法包括以下步骤:
[0050]
监测数据预处理步骤s1,在走步健身人员的走步健身过程中,接收外骨骼系统上的关节监测传感器所输出的监测数据,该监测数据包括大腿杆30在走步健身过程中的髋关节角度θ(t)与髋关节角速度ω(t);在本实施例中,基于现有设备测试出的数据如图3所示。
[0051]
数据预处理步骤s2,按下式将基于时间序列的髋关节角度θ(t)与髋关节角速度ω(t)变换成基于时间序列的相角占比基于该相角占比在[0,2π)范围的周期变化特性,对不同步幅不同步速的髋关节角度与髋关节角速度数据进行分割处理,以获取大腿杆在步态各个周期内的摆动相区间和支撑相区间。
[0052][0053]
即将基于时间的髋关节角度与髋关节角速度变换至相角占比空间,在基于相角占
比空间中的关节角速度曲线的周期变化特性,对不同步幅不同步速的时间节点进行分割处理,以获取大腿杆在行走周期内的摆动相区间,基于图3所示的检测数据,进行处理之后获取的相角曲线如图4所示,从中可以发现摆动相空间与支撑相空间的分界点为40%处。
[0054]
走步阻力计算步骤s3,在摆动相内,依据阻力与大腿杆的摆幅及摆动角速度变化率呈正相关的设定,构建阻力与相角百分比的关系曲线。
[0055]
在该步骤中,具体为在摆动相区间内,依据走步阻力与大腿杆的摆幅及摆动角速度变化率呈正相关的设定,按照对应时间序列构建走步阻力与相角占比的关系曲线。
[0056]
在该步骤中,走步阻力与大腿杆的摆幅及摆动角速度变化率的设定为:
[0057]
τ
i
=λ
·
k
·
τ
pre
[0058]
其中,t
i
为相角占比阶段的期望阻力矩,τ
pre
为预设最大人体走路阻力矩,λ是髋关节屈伸角速度修正系数,k是髋关节角度修正系数,分别为:
[0059][0060][0061]
其中,τ
i
为相角值阶段的期望阻力矩,ω
min
,ω
m
,ω分别为人体走路过程中髋关节屈伸角速度设定最小值、设定平均值以及实际采集值,τ
max
为预设最大人体走路阻力矩。θ
min
,θ
m
,θ分别为人体走路过程中一个周期内髋关节角度设定最小值、设定平均值以及实际采集值,τ为预设人体走路阻力矩,λ是髋关节屈伸角速度修正系数,k是髋关节角度修正系数。
[0062]
当人体走路过程中髋关节屈伸角速度的实际采集值比较小时,此时髋关节屈伸角速度修正系数λ也比较小,这样使相角值阶段的期望阻力矩τ
i
变小,这样人体走路过程中髋关节屈伸角速度的实际采集值也会变大,最后达到平衡;当人体走路过程中髋关节屈伸角速度的实际采集值比较大时,此时髋关节屈伸角速度修正系数λ也比较大,这样使相角值阶段的期望阻力矩τ
i
变大,这样人体走路过程中髋关节屈伸角速度的实际采集值也会变小,最后达到平衡。同样的,在人体走路过程中一个周期内髋关节角度的实际采集值比较小时,此时髋关节角度修正系数k比较小,这样使相角值阶段的期望阻力矩τ
i
变小,这样人体走路过程下一个周期里髋关节角度的实际采集值也会变大,最后达到平衡;在人体走路过程中一个周期内髋关节角度的实际采集值比较大时,此时髋关节角度修正系数k比较大,这样使相角值阶段的期望阻力矩τ
i
变大,这样人体走路过程下一个周期里髋关节角度的实际采集值也会变小,最后达到平衡。
[0063]
在本实施例中,不同相角占比时的预设阻力矩τ
pre
按照下表1所示,以查表方式获取经归一化之后的值:
[0064]
表1预设阻力矩参数查询表
[0065][0066]
如上表1所示为预设阻力矩参数查询表,图5所示预设阻力矩参数为依据该表所得。表1中同时给出了正常步行过程中人体髋关节屈伸所需的力矩(已经按力矩/体重作归一化处理)。对比步行所需力矩和阻力矩参数可以看到,以大腿向前摆动屈曲为正方向,在前40%步态周期,即摆动相区间,下肢肌肉发力输出向前摆动大腿的力矩实现摆动向前迈步,因此力矩为正,而对应该阶段阻力矩为阻碍大腿向前迈步,因此为负数;在后60%步态周期,即支撑相区间,下肢肌肉发力输出向后摆动大腿的力矩实现支撑腿向后蹬地,因此力矩为负,而对应该阶段阻力矩为阻碍大腿蹬地,因此为正数。所以,在大腿向前迈步时阻力矩作用方向向后,阻碍迈步,在大腿向后蹬地时阻力矩作用方向向前,阻碍蹬地,在整个步行过程中始终可以保持起到阻力作用。
[0067]
走步阻力施加步骤s4,依据当前所计算出的阻力曲线τ
i
,控制关节电机对大腿杆的摆动过程施加反向阻力,其行走过程中的示意图如图2所示。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。