一种运动医学用关节外科术后恢复适应训练装置
1.技术领域
2.本发明属于医疗训练装置技术领域,更具体地说,特别涉及一种运动医学用关节外科术后恢复适应训练装置。
背景技术:
3.膝、肘关节是人体运动中至关重要的关节部位,是人体最大且构造最复杂的关节,目前膝、肘关节在手术后为了保证患处正常健康的恢复功能,需要使用训练装置对膝、肘关节进行相应低强度的训练,保证患处恢复后达到最佳的治疗效果和人体功能。
4.如申请号为:cn201811242336.3的专利中,公开了一种用于膝盖损伤恢复的膝关节训练设备及训练方法,所述设备包括底座、第一支架、第二支架、第三支架、控制面板和显示屏,第一支架垂直固定设置在底座的上表面,包括脚踝固定升降装置一、挂钩一、扶手一、升降电机一、升降杆一和脚踝固定环一,第二支架固定设置在底座的上表面,包括脚踝固定升降装置二、挂钩二、扶手二、升降电机二、升降杆二和脚踝固定环二,第三支架垂直固定设置在第一支架和第二支架中心线的前方,包括牵拉电机、牵引绳和膝关节监测环,显示屏设置在控制面板上表面。总之,本发明具有结构新颖、功能齐全、安全高效、自动化程度高等优点。
5.现有的关节外科的恢复装置体积庞大,需要本来活动不便的病人移动至装置处进行训练,十分不便,且穿戴式训练装置一般只具有塑形和固定的作用,不能对患处的运动功能进行训练,容易导致肌肉萎缩等症状,影响恢复后关节的相应功能,实用性不高。
6.于是,有鉴于此,针对现有的结构及缺失予以研究改良,提供一种运动医学用关节外科术后恢复适应训练装置,以期达到更具有更加实用价值性的目的。
技术实现要素:
7.为了解决上述技术问题,本发明提供一种运动医学用关节外科术后恢复适应训练装置,以解决现有关节外科的恢复装置体积庞大,需要本来活动不便的病人移动至装置处进行训练,十分不便,且穿戴式训练装置一般只具有塑形和固定的作用,不能对患处的运动功能进行训练,容易导致肌肉萎缩等症状,影响恢复后关节的相应功能,实用性不高的问题。
8.本发明运动医学用关节外科术后恢复适应训练装置的目的与功效,由以下具体技术手段所达成:一种运动医学用关节外科术后恢复适应训练装置,包括训练架体;所述训练架体包括有上肢架体和下肢架体,上肢架体转动连接在下肢架体的架体中部;所述上肢架体和下肢架体的架体侧面均安装有肢体同步组件;
所述下肢架体的架体顶部安装有模式调节组件。
9.进一步的,所述模式调节组件包括有:定位块,定位块的块体转动连接在下肢架体的架体顶部;调节旋钮,调节旋钮转动连接在定位块的块体顶部;调节杆,调节杆插接在定位块的块体内部。
10.进一步的,所述调节杆的杆体外部设有螺纹,且调节旋钮的内部设有调节螺纹孔,调节杆通过螺纹拧接在调节螺纹孔的内部。
11.进一步的,所述调节杆的杆体外部设有四道定位滑槽,且相邻定位滑槽之间的夹角角度为九十度,定位块的块体内部设有“十”字形的定位滑条,且定位滑条插接在定位滑槽的内部。
12.进一步的,所述调节杆的杆体底部固定连接有弹簧板,且上肢架体的杆体一端转动连接有弹簧板,两个弹簧板的板体之间固定连接有模式弹簧。
13.进一步的,所述肢体同步组件在上肢架体和下肢架体的侧面均设有两组。
14.进一步的,所述肢体同步组件包括有:安装块,安装块的侧面转动连接在训练架体的侧面;主固定块,主固定块插接在安装块块体的顶部;副固定块,副固定块插接在安装块块体的底部,且主固定块和副固定块的块体侧面均固定连接有固定夹板;定位杆,定位杆的底端转动连接有安装块的内部。
15.进一步的,所述主固定块的块体截面为“l”形,副固定块块体的截面形状为“u”形。
16.进一步的,所述主固定块的侧面设有螺纹块,螺纹块的内部设有定位螺纹孔,定位杆的杆体外部设有螺纹,且定位杆通过杆体螺纹拧接在定位螺纹孔的内部。
17.进一步的,所述安装块块体内的中部设有同步齿轮,且主固定块和副固定块的块体侧面均设有同步齿条,同步齿轮两侧的轮齿分别与主固定块和副固定块的同步齿条的轮齿咬合传动。
18.与现有技术相比,本发明具有如下有益效果:首先,该装置体积小巧,使用方便,通过肢体同步组件能够将该装置固定在患者关节部位的上肢和下肢,从而促进关节部位的塑形和愈合,且该装置在使用时能够通过模式调节组件调节模式弹簧的使用状态,与训练架体的配合使用使得模式弹簧在拉伸或者压缩时能够实现对关节部位不同动作的准确训练,使用灵活方便,提高了该装置的灵活性和实用性。
19.其次,模式弹簧在拉伸或者压缩时能够实现对关节部位不同动作的精确训练,在使用时上肢架体和下肢架体至合适角度,通过模式调节组件调节模式弹簧的使用状态,当转动调节旋钮时,调节旋钮内部调节螺纹孔通过调节杆杆体螺纹带动调节杆上下移动,且调节杆的定位滑槽在定位滑条的限位作用下不会跟随调节旋钮转动,使用稳定,调节杆的上下移动能够改变调节杆底端弹簧板的位置,从而调节模式弹簧的使用状态,使得模式弹簧能够为装置提供拉力或者压力从而适应关节部位伸展和收缩训练的不同使用需求,同时可根据训练强度调节模式弹簧的初始拉伸、压缩程度,从而适应不同强度训练的使用需求,使用多样,方便灵活,提高了该装置的适应性和灵活性。
20.再者,肢体同步组件能够适应不同体型的人们佩戴该装置训练使用,主固定块和副固定块能够通过定位杆调节使用固定间距,当转动定位杆时,定位杆杆体螺纹通过定位螺纹孔带动主固定块升降,同时,主固定块的同步齿条通过同步齿轮和副固定块的同步齿条同步带动副固定块异向移动,从而将该装置固定在患者关节部位的肢体上使用,且上肢架体和下肢架体的架体外部均设有两组肢体同步组件,使用该装置佩戴更为稳定,训练时肢体与训练架体的同步更为顺畅,提高了该装置的灵活性和稳定性。
附图说明
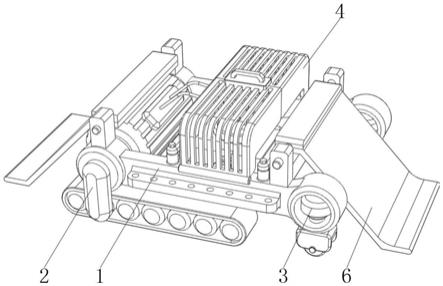
21.图1是本发明的结构示意图。
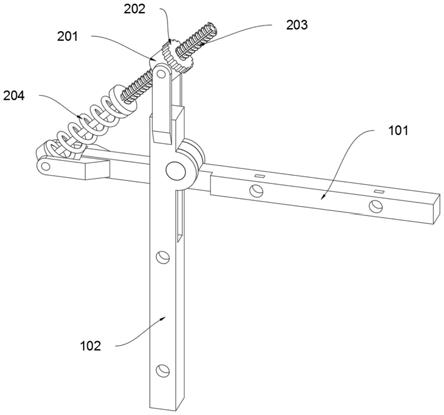
22.图2是本发明单独训练关节部位伸展时模式调节组件结构示意图。
23.图3是本发明同时训练关节部位伸缩时模式调节组件的结构示意图。
24.图4是本发明单独训练关节部位收缩时模式调节组件的结构示意图。
25.图5是本发明模式调节组件拆解后的结构示意图。
26.图6是本发明图5背侧的结构示意图。
27.图7是本发明肢体同步组件拆解后的结构示意图。
28.图8是本发明图7右侧的结构示意图。
29.图中,部件名称与附图编号的对应关系为:1、训练架体;101、上肢架体;102、下肢架体;2、模式调节组件;201、定位块;2011、定位滑条;202、调节旋钮;2021、调节螺纹孔;203、调节杆;2031、定位滑槽;204、模式弹簧;3、肢体同步组件;301、安装块;3011、同步齿轮;302、主固定块;3021、定位螺纹孔;303、副固定块;3031、同步齿条;304、定位杆。
具体实施方式
30.下面结合附图和实施例对本发明的实施方式作进一步详细描述。以下实施例用于说明本发明,但不能用来限制本发明的范围。
31.在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上;术语“上”、“下”、“左”、“右”、“内”、“外”、“前端”、“后端”、“头部”、“尾部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”等仅用于描述目的,而不能理解为指示或暗示相对重要性。
32.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
33.实施例:如附图1至附图8所示:本发明提供一种运动医学用关节外科术后恢复适应训练装置,包括训练架体1;训练架体1包括有上肢架体101和下肢架体102,上肢架体101转动连接在下肢架体
102的架体中部;上肢架体101和下肢架体102的架体侧面均安装有肢体同步组件3;下肢架体102的架体顶部安装有模式调节组件2;模式调节组件2包括有:定位块201,定位块201的块体转动连接在下肢架体102的架体顶部;调节旋钮202,调节旋钮202转动连接在定位块201的块体顶部;调节杆203,调节杆203插接在定位块201的块体内部;肢体同步组件3包括有:安装块301,安装块301的侧面转动连接在训练架体1的侧面;主固定块302,主固定块302插接在安装块301块体的顶部;副固定块303,副固定块303插接在安装块301块体的底部,且主固定块302和副固定块303的块体侧面均固定连接有固定夹板;定位杆304,定位杆304的底端转动连接有安装块301的内部;在使用中,通过肢体同步组件3能够将该装置固定在患者关节部位的上肢和下肢,从而促进关节部位的塑形和愈合,且该装置在使用时能够通过模式调节组件2调节模式弹簧204的使用状态,与训练架体1的配合使用使得模式弹簧204在拉伸或者压缩时能够实现对关节部位不同动作的定点单程训练,使用灵活方便。
34.其中,调节杆203的杆体外部设有螺纹,且调节旋钮202的内部设有调节螺纹孔2021,调节杆203通过螺纹拧接在调节螺纹孔2021的内部,在使用中,转动调节旋钮202时,调节旋钮202内部调节螺纹孔2021通过调节杆203杆体螺纹带动调节杆203上下移动。
35.其中,调节杆203的杆体外部设有四道定位滑槽2031,且相邻定位滑槽2031之间的夹角角度为九十度,定位块201的块体内部设有“十”字形的定位滑条2011,且定位滑条2011插接在定位滑槽2031的内部,在使用中,当调节旋钮202转动时,调节杆203的定位滑槽2031在定位滑条2011的限位作用下不会跟随调节旋钮202转动,使用稳定,调节杆203的上下移动能够改变调节杆203底端弹簧板的位置,从而调节模式弹簧204的使用状态。
36.其中,调节杆203的杆体底部固定连接有弹簧板,且上肢架体101的杆体一端转动连接有弹簧板,两个弹簧板的板体之间固定连接有模式弹簧204,在使用中,如附图2、附图3和附图4所示,模式弹簧204在拉伸或者压缩时能够实现对关节部位不同动作的定点单程训练,在使用时上肢架体101和下肢架体102至合适角度,通过模式调节组件2调节模式弹簧204的使用状态,调节杆203的上下移动能够改变调节杆203底端弹簧板的位置,从而调节模式弹簧204的使用状态,使得模式弹簧204能够为装置提供拉力或者压力从而适应关节部位伸展和收缩训练的不同使用需求,同时可根据训练强度调节模式弹簧204的初始拉伸、压缩程度,从而适应不同强度训练的使用需求,使用多样,方便灵活,。
37.其中,肢体同步组件3在上肢架体101和下肢架体102的侧面均设有两组,在使用中,该装置的佩戴更为稳定,训练时肢体与训练架体1的同步更为顺畅。
38.其中,主固定块302的块体截面为“l”形,副固定块303块体的截面形状为“u”形,该设计使得主固定块302和副固定块303在上下移动时不会出现歪斜、扭曲导致装置卡死失效的现象发生,使用稳定。
39.其中,主固定块302的侧面设有螺纹块,螺纹块的内部设有定位螺纹孔3021,定位
杆304的杆体外部设有螺纹,且定位杆304通过杆体螺纹拧接在定位螺纹孔3021的内部,安装块301块体内的中部设有同步齿轮3011,且主固定块302和副固定块303的块体侧面均设有同步齿条3031,同步齿轮3011两侧的轮齿分别与主固定块302和副固定块303的同步齿条3031的轮齿咬合传动,在使用中,转动定位杆304时,定位杆304杆体螺纹通过定位螺纹孔3021带动主固定块302升降,同时,主固定块302的同步齿条3031通过同步齿轮3011和副固定块303的同步齿条3031同步带动副固定块303异向移动,从而将该装置固定在患者关节部位的肢体上使用。
40.在另一实施例中,主固定块302和副固定块303的块体侧面固定夹板的夹持面为弧形设计,且固定夹板的夹持面内部设有软质的橡胶防滑层,提高了该装置佩戴后以及训练过程中的舒适感。
41.本实施例的具体使用方式与作用:本发明中,通过肢体同步组件3将该装置佩戴在患者关节部位的肢体上,且训练架体1的转动方向需要与关节的转动方向相同,肢体同步组件3能够适应不同体型的人们佩戴该装置训练使用,主固定块302和副固定块303能够通过定位杆304调节使用固定间距,当转动定位杆304时,定位杆304杆体螺纹通过定位螺纹孔3021带动主固定块302升降,同时,主固定块302的同步齿条3031通过同步齿轮3011和副固定块303的同步齿条3031同步带动副固定块303异向移动,从而将该装置固定在患者关节部位的肢体上使用,且上肢架体101和下肢架体102的架体外部均设有两组肢体同步组件3,使用该装置佩戴更为稳定,训练时肢体与训练架体1的同步更为顺畅,模式弹簧204在拉伸或者压缩时能够实现对关节部位不同动作的定点单程训练,在使用时上肢架体101和下肢架体102至合适角度,通过模式调节组件2调节模式弹簧204的使用状态,当转动调节旋钮202时,调节旋钮202内部调节螺纹孔2021通过调节杆203杆体螺纹带动调节杆203上下移动,且调节杆203的定位滑槽2031在定位滑条2011的限位作用下不会跟随调节旋钮202转动,使用稳定,调节杆203的上下移动能够改变调节杆203底端弹簧板的位置,从而调节模式弹簧204的使用状态,使得模式弹簧204能够为装置提供拉力或者压力从而适应关节部位伸展和收缩训练的不同使用需求,同时可根据训练强度调节模式弹簧204的初始拉伸、压缩程度,从而适应不同强度训练的使用需求:
①
、如附图2所示,此时训练架体1伸展时模式弹簧204为装置提供压力,从而此时该装置可对关节部位进行伸展训练;
②
、如附图3所示,此时训练架体1在伸展和收缩时均会受到模式弹簧204为装置提供的作用力,从而此时该装置可对关节部位同时进行伸缩训练;
③
、如附图4所示,此时训练架体1在收缩时模式弹簧204位装置提供拉力,从而此时该装置可对关节部位进行收缩训练;该装置体积小巧,使用方便,通过肢体同步组件3能够将该装置固定在患者关节部位的上肢和下肢,从而促进关节部位的塑形和愈合,且该装置在使用时能够通过模式调节组件2调节模式弹簧204的使用状态,与训练架体1的配合使用使得模式弹簧204在拉伸或者压缩时能够实现对关节部位不同动作的定点单程训练,使用灵活方便。
42.本发明的实施例是为了示例和描述起见而给出的,而并不是无遗漏的或者将本发明限于所公开的形式。很多修改和变化对于本领域的普通技术人员而言是显而易见的。选
择和描述实施例是为了更好说明本发明的原理和实际应用,并且使本领域的普通技术人员能够理解本发明从而设计适于特定用途的带有各种修改的各种实施例。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。