1.本发明涉及一种招生宣传系统,特别涉及一种载有太阳能自动逐光系统定位公交站。
背景技术:
2.智能公交就是运用当下最先进的gps/北斗定位技术、3g/4g通信技术、 gis地理信息系统技术,结合公交车辆的运行特点,建设公交智能调度系统,对线路、车辆进行规划调度,实现智能排班、提高公交车辆的利用率,同时通过建设完善的视频监控系统实现对公交车内、站点及站场的监控管理,智能公交是未来公共交通发展的必然模式,对缓减日益严重的交通拥堵问题有着重大的意义,中国大部分一线城市都已实现公交智能化。
3.目前智能化公交站在使用时,还存在一些缺陷和不足,具体需要改进的地方如下:
4.1、目前大多数的智能公交站中的太阳能板均是固定式的而不具备自动逐光功能,进而一定程度上降低了智能公交站使用过程中环保能源获取的总量;
5.2、现有大多数的智能公交站没有为盲人设计相应的语音播报功能,进而没有给盲人乘车带来了一定便利,进而一定程度上降低了智能公交站的功能实用性;
6.3、现有大多数的智能公交站均不能实现可交互式和智能报告功能,进而一定程度上降低了智能公交站的功能实用性;
7.4、现有大多数的智能公交站均布具备对外充电功能,进而不能够一定程度上为等车人员提供一定的便利;
8.5、现有智能公交站定位系统响应不够迅速、定位精度不够高、定位位置不够直观,进而则会一定程度上影响等车人员的判断,进而则不可避免的会给等车人员带来一定不便。
技术实现要素:
9.本发明的目的在于提供一种载有太阳能自动逐光系统定位公交站,以解决上述背景技术中提出的目前大多数的智能公交站中的太阳能板均是固定式的而不具备自动逐光功能,进而一定程度上降低了智能公交站使用过程中环保能源获取总量的问题。
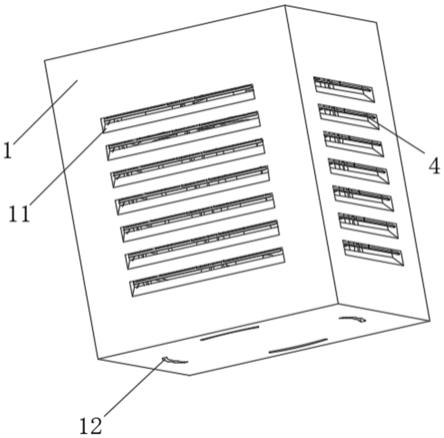
10.为实现上述目的,本发明提供如下技术方案:一种载有太阳能自动逐光系统定位公交站,包括支撑装置,所述支撑装置上端设置有逐光装置,所述支撑装置包括两个支撑杆,两个所述支撑杆上端均固定连接有上支板下侧面,两个所述支撑杆之间固定连接有广告板,所述广告板上设置有广播语音装置、报告装置、人机交互显示屏以及充电装置,所述上支板前端下侧面上设置有照明装置以及全视角监控装置。
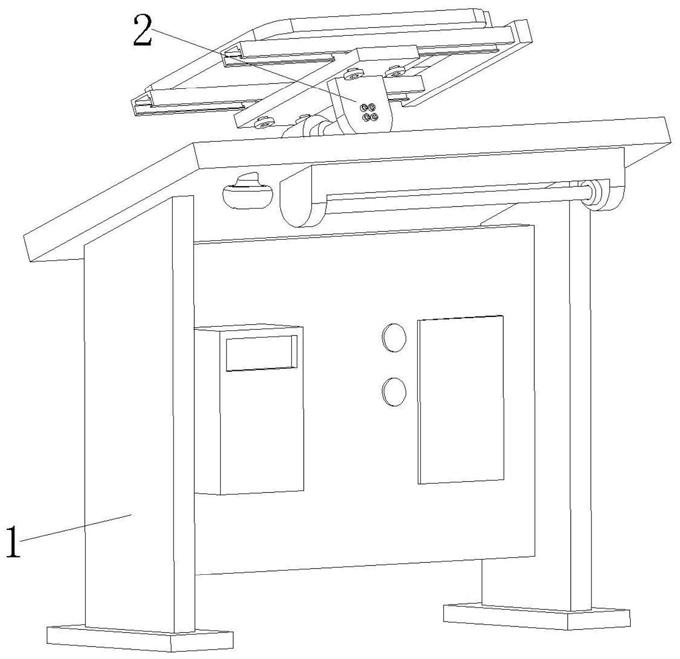
11.作为本发明的一种优选技术方案,所述逐光装置包括基座,所述基座固定连接在上支板上侧面上,所述基座内固定连接有减速电机,所述减速电机输出轴上固定连接有动力板,所述动力板上端固定连接有双轴推杆,所述双轴推杆上端固定连接有太阳能板,所述太阳能板后端设置有中央处理器,所述中央处理器固定连接在双轴推杆后端。
12.作为本发明的一种优选技术方案,所述充电装置采用阶段式脉冲式充电法,即先采用周期性的恒定电流脉冲对电池进行快速充电,然后采用恒压脉冲充电方式,最后采用涓流脉冲充电。
13.作为本发明的一种优选技术方案,所述中央处理器为树莓派4代b型,所述中央处理器通过esp无线模块、服务器和pc端通信双向电连接双轴推杆以及减速电机,所述中央处理器同时通过esp无线模块、服务器和pc端通信双向电连接广播语音装置、报告装置、人机交互显示屏、充电装置照明装置以及全视角监控装置,所述中央处理器同时双向电连接有定位模块。
14.作为本发明的一种优选技术方案,所述定位模块上设置有北斗和gps两个定位模块,且选用兼容性强的gps模块并通过gpio串口连接中央处理器,所述定位模块在多点定位系统到达时间差tdoa原理的基础上采用极位追踪算法求解目标位置,所述定位模块采用opencv库里面的kuylong,从背景分离出移动的目标,使用cv2寻找到图像。
15.作为本发明的一种优选技术方案,所述人机交互显示屏的显示系统是基于qt开发的pc端可视化界面,且显示系统在数据平台上开发实现tcp服务器功能,且人机交互显示屏采用dfs深度优先搜索算法,且dfs深度优先搜索算法为用于遍历或搜索树或图的算法,且中央处理器控制的人机交互显示屏现实的界面主要用来实现人机对话和车辆信息显示功能,且中央处理器控制的人机交互显示屏显示的界面采用python自带的pyqt5库实现,所述人机交互显示屏基于linux的raspbian操作系统,选用python语言编程,通过第三方serial组件向控制卡写入命令字符代码令,并读取返回参数。
16.作为本发明的一种优选技术方案,所述照明装置内设置有光控电子元件,所述全视角监控装置具有断网监控功能、循环录像覆盖功能、360度全范围监控功能以及高清夜视功能,所述全视角监控装置采用webrtc技术,所述报告装置支持802.22b/g/n协议的esp8533模块,且esp8533模块适用gpio端口集成传感器,所述报告装置直接从外部闪存启动。
17.与现有技术相比,本发明的有益效果是:
18.1、本发明通过设置逐光装置包括的中央控制器控制减速电机、双轴推杆以及动力板驱动太阳能板随太阳直射点移动,进而将带动太阳能板双向吸光,进而使得太阳能板始终面向太阳光,进而克服了太阳能密度低、间歇性、空间分布不断变化的特点,从而提高了太阳能板可接收效率,最大限度的利用自然资源太阳能发电,进而使得该逐光装置中的太阳能板对比与普通固定式太阳能板接收的太阳能高40%,从而解决了目前大多数的智能公交站中的太阳能板均是固定式的而不具备自动逐光功能,进而一定程度上降低了智能公交站使用过程中环保能源获取总量的问题。
19.2、本发明通过设置广播语音装置以及中央控制器实现了语音播报以及语音提问的功能,进而给盲人使用该装置带来了一定的方便,同时还一定程度上方便了盲人得到公交车相关信息和公交站台周边地图信息,从而解决了现有大多数的智能公交站没有为盲人设计相应的语音播报功能,进而没有给盲人乘车带来了一定便利,进而一定程度上降低了智能公交站功能实用性的问题。
20.3、本发明通过设置人机交互显示屏以及人机交互的界面实现了人机交互,进而方便了等车人员获得天气、地图以及公车位置的信息,同时通过报告装置还方便了需要人员
快速报告,而且通过全视角监控装置能够进而一定程度上可以360度无死角捕获,自带热点断网监控,循环录像覆盖,高清夜视理部门提供刑侦资料,进而解决了现有大多数的智能公交站均不能实现可交互式和智能报告功能,进而一定程度上降低了智能公交站功能实用性的问题。
21.4、本发明通过设置充电装置以及太阳能电池板方便等车人员以及骑手充电,而且通过充电装置的阶段式脉冲式充电法保证充电的快速安全性,进而解决了现有大多数的智能公交站均布具备对外充电功能,进而不能够一定程度上为等车人员提供一定便利的问题。
22.5、本发明通过设置的定位模块,定位模块包括的极位追踪算法以及北斗加gps模块实现了精准定位的目的,进而解决了现有智能公交站定位系统响应不够迅速、定位精度不够高、定位位置不够直观,进而则会一定程度上影响等车人员的判断,进而则不可避免的会给等车人员带来一定不便的问题。
附图说明
23.图1为本发明的正视轴侧结构示意图;
24.图2为本发明的后视轴侧结构示意图;
25.图3为本发明的逐光装置轴侧结构示意图;
26.图4为本发明的支撑装置轴侧结构示意图;
27.图5为本发明的系统物理通信结构示意图;
28.图6为本发明的人机交互数据处理的部分代码结构示意图;
29.图7为本发明的人机交互界面结构示意图。
30.图中:1支撑装置、11支撑杆、12上支板、13充电装置、14广告板、15 照明装置、16全视角监控装置、17广播语音装置、18报告装置、19人机交互显示屏、2逐光装置、21中央处理器、22太阳能板、23双轴推杆、24减速电机、25基座、26动力板。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.请参阅图1
‑
7,本发明提供了一种载有太阳能自动逐光系统定位公交站的技术方案:
33.支撑装置1上端设置有逐光装置2,支撑装置1包括两个支撑杆11,两个支撑杆11上端均固定连接有上支板12下侧面,两个支撑杆11之间固定连接有广告板14,广告板14上设置有广播语音装置17、报告装置18、人机交互显示屏19以及充电装置13,上支板12前端下侧面上设置有照明装置15以及全视角监控装置16。
34.逐光装置2包括基座25,基座25固定连接在上支板12上侧面上,基座 25内固定连接有减速电机24,减速电机24输出轴上固定连接有动力板26,动力板26上端固定连接有双轴推杆23,双轴推杆23上端固定连接有太阳能板22,太阳能板22后端设置有中央处理器21,
中央处理器21固定连接在双轴推杆23后端。
35.充电装置13采用阶段式脉冲式充电法,即先采用周期性的恒定电流脉冲对电池进行快速充电,然后采用恒压脉冲充电方式,最后采用涓流脉冲充电。
36.中央处理器21为树莓派4代b型,中央处理器21通过esp无线模块、服务器和pc端通信双向电连接双轴推杆23以及减速电机24,中央处理器21 同时通过esp无线模块、服务器和pc端通信双向电连接广播语音装置17、报告装置18、人机交互显示屏19、充电装置13照明装置15以及全视角监控装置16,中央处理器21同时双向电连接有定位模块。
37.定位模块上设置有北斗和gps两个定位模块,且选用兼容性强的gps模块并通过gpio串口连接中央处理器21,定位模块在多点定位系统到达时间差 tdoa原理的基础上采用极位追踪算法求解目标位置,定位模块采用opencv库里面的kuylong,从背景分离出移动的目标,使用cv2寻找到图像。
38.人机交互显示屏19的显示系统是基于qt开发的pc端可视化界面,且显示系统在数据平台上开发实现tcp服务器功能,且人机交互显示屏19采用dfs 深度优先搜索算法,且dfs深度优先搜索算法为用于遍历或搜索树或图的算法,且中央处理器21控制的人机交互显示屏19现实的界面主要用来实现人机对话和车辆信息显示功能,且中央处理器21控制的人机交互显示屏19显示的界面采用python自带的pyqt5库实现,人机交互显示屏19基于linux 的raspbian操作系统,选用python语言编程,通过第三方serial组件向控制卡写入命令字符代码令,并读取返回参数。
39.照明装置15内设置有光控电子元件,全视角监控装置16具有断网监控功能、循环录像覆盖功能、360度全范围监控功能以及高清夜视功能,全视角监控装置16采用webrtc技术,报告装置18支持802.22b/g/n协议的esp8533 模块,且esp8533模块适用gpio端口集成传感器,报告装置18直接从外部闪存启动。
40.在使用该装置时,可以通过逐光装置2包括的中央控制器控制减速电机 24、双轴推杆23以及动力板26驱动太阳能板22随太阳直射点移动,进而将带动太阳能板22双向吸光,进而使得太阳能板22始终面向太阳光,进而克服了太阳能密度低、间歇性、空间分布不断变化的特点,从而提高了太阳能板22可接收效率,最大限度的利用自然资源太阳能发电,进而使得该逐光装置2中的太阳能板22对比与普通固定式太阳能板22接收的太阳能高40%,进而保证了该装置的结构功能性;
41.通过中央处理器21中的特定信号模块,并且配合自主研发的极位追踪算法与北斗卫星进行数据的传输,使信号更强,定位更准,可实时定位公交车行驶路径和速度,方便公交站台等待人员合理安排等候时间;
42.其中极位追踪算法与chan算法不同,极位追踪算法定位更精准、响应更快速、可视范围更广,极位追踪算法是采用两次最小二乘迭代对目标位置进行求解,在噪声符合高斯分布的情况下,定位精度较高,而且计算量较小。在多点定位系统到达时间差tdoa原理的基础上,使用极位追踪算法求解目标位置,最后通过设定不同的基站坐标进行目标定位,以几何精度因子gdop分析了不同的布站方式对多点定位系统定位精度的影响,通过仿真进一步证明了极位追踪算法和gdop因子的有效性,之后则采用opencv库里面的 kuylong,从背景分离出移动的目标,使用cv2寻找到图像,而且还选用兼容性强的gps模块,通过gpio串口连接树莓派,无需安装驱动,当树莓派和gps 模块连接成功后,使用gps读取cgps数据,在读取
过程中的安装指令为sudo apt
‑
get install gpsd python
‑
gps,然后使用命令cgps
‑
s运行cgps,接下来即可看到北斗卫星所传回的数据,进而即可提取公交车经纬度信息,之后可通过云端监控公交车经纬度和乘车人员数量,进而通过大数据技术反馈到公交站台人机交互显示屏19上,形成可视化公交车行驶路径,公交车信息一目了然,让公交站台等待人员不再被动候车;
43.系统是基于qt开发的pc端可视化界面,在数据平台上开发实现tcp服务器功能,也开发了后面需要web访问的http服务器功能,实现了对公交车内部乘客信息、定位等情况的实时监控,对公交车精确定位完成快速统计,公交站台可以实时显示公交车行驶路径等即时数据;
44.通过广播语音装置17可进行人机交互,进而方便盲人得到公交车相关信息和公交站台周边地图信息,本发明采用dfs深度优先搜索算法,该算法是一种用于遍历或搜索树或图的算法,沿着树的深度遍历树的节点,尽可能深的搜索树的分支,当节点v的所在边都己被探寻过或者在搜寻时结点不满足条件,搜索将回溯到发现节点v的那条边的起始节点,整个进程反复进行直到所有节点都被访问为止,dfs算法应用两个数组,一个用来标记该点是否被访问过,一个用来把该点放入数组,dfs就是随机选定一个起点将其标记为已经访问过的点,然后就是递归调用进行与其相邻的点的搜索,从而可实现操作方式“傻瓜式”,进而即可达到以下效果:第一,产品功能更加形象化,第二,产品主要功能可直观显示,第三,产品次要功能信息量小,交付层级减少,进而即可保证无操作经验的人员也可独立完成搜周边、报站点的功能;
45.树莓派端的人机交互界面主要用来实现人机对话和车辆信息显示功能,其中的软件编程采用python自带的pyqt5库实现,而且照明装置15可根据光线的明暗实现亮灭,既节能环保又便利稳定;站台内设置有无线摄像头, 360度无死角捕获,自带热点断网监控,循环录像覆盖,高清夜视。
46.采用webrtc技术可在不安装任何扩展和插件的前提下实现点对点的实时通信,是目前实时物联网视频监控中应用较广的技术,该技术以不同端口运行的方法部署中控系统树莓派中进行通信。应用支持802.22b/g/n协议的esp8533模块,充当设备中唯一的应用程序处理器时,可以直接从外部闪存启动,且内置缓存有助于提高其系统性能和减少内存需求。esp8533芯片集成度很高,适用gpio端口集成传感器,可实现系统资源的最小预开发和操作;
47.通过中央控制器集成的usb转rs232串口芯片对外提供usb接口,中央控制器可与树莓派直接通过usb数据线建立物理连接,树莓派端人机交互显示屏19,安装基于linux的raspbian操作系统,该系统自带串口驱动,可直接使用控制卡对应的串口资源,如“dev/ttyusb”,其中选用python语言编程,通过第三方serial组件向控制卡写入命令字符代码令,并读取返回参数,从而实现树莓派和控制卡串口通信,响应速度快,保证了一键报告速度;
48.其中充电装置13采用阶段式脉冲式充电法,进而可检测需要充电的蓄电池当前状态而即时改变充电电压和电流,进而来实现快速充电的目的,而且充电过程中先采用周期性的恒定电流脉冲对电池进行快速充电,实行短时大量充电,然后采用恒压脉冲充电方式,避免充电过量,最后采用涓流脉冲充电,可以保证电池电量饱和而不过充,进而使得骑手在
电动车电量不足时,途径公交站可快速充电,进而一定程度上在增加了该公交站的功能实用性。
49.在本发明中,除非另有明确的规定和限定,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
50.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。