1.本发明涉及无人驾驶飞行器技术领域,尤其涉及一种多角度同步拍摄的无人飞行器及其使用方法。
背景技术:
2.近些年,随着大型企业及科研院所对无人飞行器的研究的热度不断增加,无人机的功能多样化渐渐走进大众的视野,也使得无人机的市场份额也不断增加。人们常常使用无人机进行场景拍摄、运送快递、喷洒农药等等;跟我们生活息息相关的,相对较多的还是场景拍摄方面无人机的使用相对较多。但是,申请人发现:现有的无人飞行器主要包括飞行器主体、折叠臂、螺旋叶片等主要硬件,以及自带的控制系统这一软件;但是对于硬件而言,折叠臂作为其重要的组合部件,折叠臂的展开及折叠的结构多存在结构复杂、球铰的使用往往会使得每个折叠臂的展开角度不易保持相同大小,大大影响了无人飞行器的飞行效率,尤其在特殊环境或者特殊场合下使用时(例如试验场地对部分远程航拍精度有特殊要求),由于折叠臂的展开角度不能达到预设值,会影响拍摄精度并给使用带来后续的不便。对于软件而言,无人飞行器在场景拍摄时会存在无人飞行器的数据易丢失,相邻之间的无人飞行器的通信方式研究涉足较少,有时对于同一场景,在不同高度、不同水平位置,单个无人飞行器拍摄的往往会因不能及时进行捕捉图像信息,而使得场景拍摄的成效大大降低。基于此,本技术提出了一种用于多角度同步拍摄的无人飞行器及其使用方法,以克服上述缺陷,满足使用需要。
技术实现要素:
3.针对现有技术中无人飞行器存在的上述不足,本发明的目的在于:提供一种多角度同步拍摄的无人飞行器及其使用方法,其具有结构设计合理、安装及使用方便的特点,不仅能够实现相邻无人飞行器间的无线通信以及与远程智能终端的通信,还能够通过折叠臂组件对无人飞行器的折叠和展开角度能够准确控制,大大提高了无人飞行器的飞行效率,满足了实际设计及使用的需要。
4.为了达到上述目的,本发明采用如下技术方案实现:一种用于多角度同步拍摄的无人飞行器,该无人飞行器设置有多个,并按预设位置在水平方向和/或竖直方向间隔分布布设;每个无人飞行器均包括飞行器主体、设置在飞行器主体上的折叠臂组件,该折叠臂组件上设置有螺旋叶片;所述飞行器主体内设置有主控制电路,该主控制电路包括螺旋叶片运动启闭控制电路、无线通信电路、电源电路、图像拍摄存储电路、图像处理电路;其中电源电路分别与螺旋叶片运动启闭控制电路、无线通信电路、图像拍摄存储电路和图像处理电路电连接;所述螺旋叶片运动启闭控制电路与螺旋叶片控制连接用于控制螺旋叶片转动;所述图像拍摄存储电路与高清摄像头数据信号连接用于将高清摄像头实时拍摄的图像进行存储;所述图像拍摄存储电路包括tf内存卡或sd内存卡;所述图像处理电路与图像拍摄存储电路相连接用于将图像拍摄存储的图像进行处
理,并将处理后的图像存储于图像拍摄存储电路中;所述图像拍摄存储电路通过无线通信电路与位于同一水平方向和/或同一竖直方向的相邻无人飞行器的图像拍摄存储电路无线通信连接,用于将拍摄的图像与相邻无人飞行器进行数据信息存储,防止信息丢失;所述无线通信电路包括3g、4g、5g或者wifi网络;所述图像拍摄存储电路还通过无线通信电路与远程智能终端无线通信连接;所述远程智能终端包括智能手机、笔记本电脑或者ipad。
5.作为上述方案的进一步优化,该折叠臂组件包括臂本体、第一枢接件、第二枢接件、第一安装座及第二安装座;第一枢接件的一端与第一安装座固定连接,另一端与第二枢接件的一端固定连接,第二枢接件的一端与第二安装座固定连接,第一安装座与飞行器主体固定连接,第二安装座与臂本体固定连接;其中第一枢接件为
“┌”
型结构,包括第一横向部和第一竖向部,第一竖向部上设置有第一枢接轴,该第一枢接轴可转动地设置于第一安装座上;第二枢接件为
“┐”
型结构,包括第二横向部和第二竖向部,第二竖向部上设置有第二枢接轴,该第二枢接轴可转动地设置于第二安装座上;第一枢接件与第二枢接件构成为“ㄇ”型;所述臂本体通过第一枢接件和第二枢接件能够绕飞行器主体转动0
‑
180
°
;所述臂本体还包括若干个可折叠的板体,所述板体通过铰轴活动连接,并且在相邻两个板体任一方的同一侧板面上设置有锁止限位板;在相邻两个板体另一方的另一侧板面上也设置有锁止限位板;所述锁止限位板枢转地连接在板体上;当可折叠的板体打开伸展至预设长度时,通过旋转相邻两个板体上的锁止限位板,将臂本体锁定至预设长度或者解锁。
6.作为上述方案的进一步优化,该无人飞行器还包括控制组件,所述控制组件包括电源、显示器、控制器和角度传感器,所述电源分别与显示器、控制器、角度传感器电连接;所述角度传感器与控制器数据信号连接;所述显示器设置于飞行器主体的外壳上,并与控制器相连接;所述第一枢接轴和第二枢接轴为空心轴体,所述角度传感器分别设置于第一枢接轴、第二枢接轴的空心轴体内,分别用于实时检测第一枢接件和第二枢接件的转动角度信号,并将实时检测的角度信号发送至控制器;所述控制器将接收到的转动角度信号经数据转换后,通过显示器进行显示。
7.作为上述方案的进一步优化,所述第一枢接轴和第二枢接轴上设置有限位突起;所述第一安装座对应第一枢接轴的位置处设置有两个与限位突起相互配合的限位槽;其中一个限位槽用于臂本体处于折叠状态时将臂本体锁止在该状态;另一个限位槽用于臂本体处于完全展开状态时将臂本体锁止在当前状态。
8.作为上述方案的进一步优化,所述第一安装座和第二安装座上均设置有油脂注油孔;所述油脂注油孔的一端为开口端,另一端连接至相应的枢接轴;所述开口端上还设置有密封塞。
9.作为上述方案的进一步优化,所述第一枢接件上凸设有橡胶膨大端头,所述飞行器主体的外壳上还设置有与橡胶膨大端头相适配的插接孔,通过将橡胶膨大端头插入于插接孔中,用于当臂本体处于折叠状态时将臂本体锁止在该状态;所述第二枢接件上设置有插接孔,所述飞行器主体的外壳上对应第二枢接件的插接孔处设置有橡胶膨大端头,通过将插接孔套设于橡胶膨大端头时,用于当臂本体处于完全展开状态时将臂本体锁止在当前状态。
10.一种用于多角度同步拍摄的无人飞行器的使用方法包括如下步骤:
1)无人飞行器的数量确定:根据实际使用需要,确定无人飞行器的使用数量,对所选择的每个无人飞行器进行编号,并检查每个无人飞行器的电量,对各电路的运行状态做试运行检测;2)无人飞行器飞行路线的规划:根据实际使用需要,将每个无人飞行器的飞行路线提前规划好,包括飞行高度的确定和/或飞行速度的确定和/或飞行时间的确定;3)无人飞行器间的通信:先后启动每个无人飞行器,使每个无人飞行器按照预设的飞行路线进行飞行;打开高清摄像头,对待拍摄区域进行实时拍摄;图像拍摄存储电路将高清摄像头实时拍摄的图像进行存储;图像处理电路将图像拍摄存储的图像进行处理,并将处理后的图像存储于图像拍摄存储电路中;图像拍摄存储电路通过无线通信电路与位于同一水平方向和/或同一竖直方向的相邻无人飞行器的图像拍摄存储电路无线通信连接,用于将拍摄的图像与相邻无人飞行器进行数据信息存储,防止信息丢失;4)无人飞行器与远程智能终端的通信:图像拍摄存储电路还通过无线通信电路与远程智能终端无线通信连接;5)待完成多角度同步拍摄任务后,将每个无人飞行器返回至初始起飞位置。
11.采用本发明所述的多角度同步拍摄的无人飞行器及其使用方法具有如下有益效果:(1)利用无人飞行器间的相互通信,能够实现拍摄数据的相互存储,以便于远程智能终端对各个无人飞行器的拍摄图像信息进行获取,同时,提高了对拍摄图像存储的安全性、实时性、不易丢失。
12.(2)折叠臂组件的结构设计,能够使得无人飞行器在折叠时不占用较多空间,便于存放;在展开时,能够开启至预设角度,大大提高了折叠臂组件的展开精度,降低了后续应折叠臂展开精度不高导致后续精度要求不高的影响。
13.(3)对于折叠臂组件上的限位组件设置、角度检测、锁止部件等结构的设计,通过机械式的限位结构具有使用方便、性能可靠以及便于维护;采用角度检测能够对折叠臂组件展开过程中展开角度的实时获取,便于操作人员读取;锁止部件的设计能够使得在展开和折叠状态下进行保持,同前书机械式的限位结构一样,具有相类似的优点,在此不再赘述。
附图说明
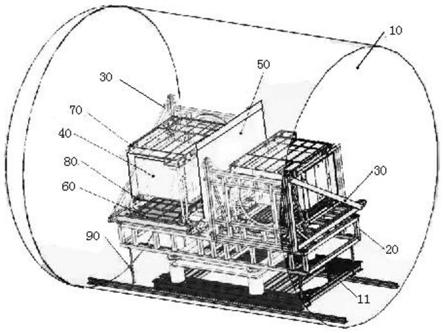
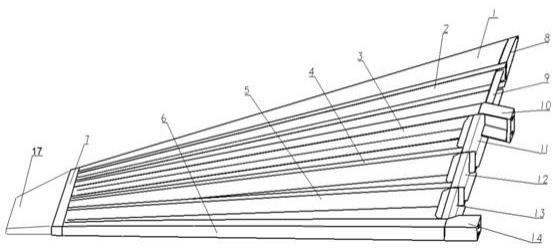
14.附图1为本发明无人飞行器的实际工作结构示意图;附图2为本发明无人飞行器的单个结构示意图;附图3为本发明无人飞行器的工作原理示意图;附图4为本发明无人飞行器的折叠臂组件中第一枢接件和第二枢接件的连接结构示意图;附图5为本发明无人飞行器的折叠臂组件的臂本体仰视结构示意图;附图6为本发明无人飞行器的折叠臂组件的臂本体俯视结构示意图;附图7为本发明无人飞行器的控制组件结构示意图。
具体实施方式
15.下面结合附图1
‑
7对本发明无人飞行器及其使用方法作如下详细说明。
16.一种用于多角度同步拍摄的无人飞行器,该无人飞行器1设置有多个,并按预设位置在水平方向和/或竖直方向间隔分布布设;每个无人飞行器均包括飞行器主体2、设置在飞行器主体上的折叠臂组件3,该折叠臂组件上设置有螺旋叶片4;所述飞行器主体内设置有主控制电路5,该主控制电路包括螺旋叶片运动启闭控制电路6、无线通信电路7、电源电路8、图像拍摄存储电路9、图像处理电路10;其中电源电路分别与螺旋叶片运动启闭控制电路、无线通信电路、图像拍摄存储电路和图像处理电路电连接;所述螺旋叶片运动启闭控制电路与螺旋叶片控制连接用于控制螺旋叶片转动;所述图像拍摄存储电路与高清摄像头数据信号连接用于将高清摄像头实时拍摄的图像进行存储;所述图像拍摄存储电路包括tf内存卡或sd内存卡;所述图像处理电路与图像拍摄存储电路相连接用于将图像拍摄存储的图像进行处理,并将处理后的图像存储于图像拍摄存储电路中;所述图像拍摄存储电路通过无线通信电路与位于同一水平方向和/或同一竖直方向的相邻无人飞行器的图像拍摄存储电路无线通信连接,用于将拍摄的图像与相邻无人飞行器进行数据信息存储,防止信息丢失;所述无线通信电路包括3g、4g、5g或者wifi网络;所述图像拍摄存储电路还通过无线通信电路与远程智能终端11无线通信连接;所述远程智能终端包括智能手机、笔记本电脑或者ipad。
17.该折叠臂组件包括臂本体12、第一枢接件13、第二枢接件14、第一安装座15及第二安装座16;第一枢接件的一端与第一安装座固定连接,另一端与第二枢接件的一端固定连接,第二枢接件的一端与第二安装座固定连接,第一安装座与飞行器主体固定连接,第二安装座与臂本体固定连接;其中第一枢接件为
“┌”
型结构,包括第一横向部13
‑
1和第一竖向部13
‑
2,第一竖向部上设置有第一枢接轴13
‑
3,该第一枢接轴可转动地设置于第一安装座上;第二枢接件为
“┐”
型结构,包括第二横向部14
‑
1和第二竖向部14
‑
2,第二竖向部上设置有第二枢接轴14
‑
3,该第二枢接轴可转动地设置于第二安装座上;第一枢接件与第二枢接件构成为“ㄇ”型;所述臂本体通过第一枢接件和第二枢接件能够绕飞行器主体转动0
‑
180
°
;所述臂本体还包括若干个可折叠的板体17,所述板体通过铰轴18活动连接,并且在相邻两个板体任一方的同一侧板面上设置有锁止限位板19;在相邻两个板体另一方的另一侧板面上也设置有锁止限位板;所述锁止限位板枢转地连接在板体上;当可折叠的板体打开伸展至预设长度时,通过旋转相邻两个板体上的锁止限位板,将臂本体锁定至预设长度或者解锁。
18.该无人飞行器还包括控制组件20,所述控制组件包括电源21、显示器22、控制器23和角度传感器24,所述电源分别与显示器、控制器、角度传感器电连接;所述角度传感器与控制器数据信号连接;所述显示器设置于飞行器主体的外壳上,并与控制器相连接;所述第一枢接轴和第二枢接轴为空心轴体,所述角度传感器分别设置于第一枢接轴、第二枢接轴的空心轴体内,分别用于实时检测第一枢接件和第二枢接件的转动角度信号,并将实时检测的角度信号发送至控制器;所述控制器将接收到的转动角度信号经数据转换后,通过显示器进行显示。
19.所述第一枢接轴和第二枢接轴上设置有限位突起;所述第一安装座对应第一枢接
轴的位置处设置有两个与限位突起相互配合的限位槽;其中一个限位槽用于臂本体处于折叠状态时将臂本体锁止在该状态;另一个限位槽用于臂本体处于完全展开状态时将臂本体锁止在当前状态。
20.所述第一安装座和第二安装座上均设置有油脂注油孔;所述油脂注油孔的一端为开口端,另一端连接至相应的枢接轴;所述开口端上还设置有密封塞。
21.所述第一枢接件上凸设有橡胶膨大端头,所述飞行器主体的外壳上还设置有与橡胶膨大端头相适配的插接孔,通过将橡胶膨大端头插入于插接孔中,用于当臂本体处于折叠状态时将臂本体锁止在该状态;所述第二枢接件上设置有插接孔,所述飞行器主体的外壳上对应第二枢接件的插接孔处设置有橡胶膨大端头,通过将插接孔套设于橡胶膨大端头时,用于当臂本体处于完全展开状态时将臂本体锁止在当前状态。
22.本发明所述用于多角度同步拍摄的无人飞行器的使用方法包括如下步骤:1)无人飞行器的数量确定:根据实际使用需要,确定无人飞行器的使用数量,对所选择的每个无人飞行器进行编号,并检查每个无人飞行器的电量,对各电路的运行状态做试运行检测;2)无人飞行器飞行路线的规划:根据实际使用需要,将每个无人飞行器的飞行路线提前规划好,包括飞行高度的确定和/或飞行速度的确定和/或飞行时间的确定;3)无人飞行器间的通信:先后启动每个无人飞行器,使每个无人飞行器按照预设的飞行路线进行飞行;打开高清摄像头,对待拍摄区域进行实时拍摄;图像拍摄存储电路将高清摄像头实时拍摄的图像进行存储;图像处理电路将图像拍摄存储的图像进行处理,并将处理后的图像存储于图像拍摄存储电路中;图像拍摄存储电路通过无线通信电路与位于同一水平方向和/或同一竖直方向的相邻无人飞行器的图像拍摄存储电路无线通信连接,用于将拍摄的图像与相邻无人飞行器进行数据信息存储,防止信息丢失;4)无人飞行器与远程智能终端的通信:图像拍摄存储电路还通过无线通信电路与远程智能终端无线通信连接;5)待完成多角度同步拍摄任务后,将每个无人飞行器返回至初始起飞位置。
23.需要说明的是:控制组件中的相应电子元器件(例如电源、控制器、角度传感器、无线通信组件等),对于单个电子元器件而言,其类型及运行参数的选择,可根据实际设计从现有技术中获取;另外,图像拍摄存储电路、图像处理电路中设置有与高清摄像机相适配的连接口,能够对高清摄像机拍摄的图像进行实时存储,并对图像进行处理,该处理包括有(灰度处理、二值化处理、高斯图像处理等),对于图像处理采用现有技术中的视觉图像处理技术,即可满足操作人员通过无线通信组件对拍摄的图像进行获取,在此不再赘述。
24.上述的对实施例的描述是为便于该技术领域的普通技术人员能理解和应用本发明。熟悉本领域技术的人员显然可以容易地对这些实施例做出各种修改,并把在此说明的一般原理应用到其他实施例中而不必经过创造性的劳动。因此,本发明不限于这里的实施例,本领域技术人员根据本发明的揭示,不脱离本发明范畴所做出的改进和修改都应该在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。