1.本发明涉及一种用于扑翼式飞行器的传动机构组件,所述传动机构组件具有齿轮支架,在所述齿轮支架处绕齿轮轴线能够转动运动地支承有齿轮,所述传动机构组件具有曲轴,所述曲轴抗转动地与齿轮连接,并且所述曲轴具有与齿轮轴线同轴地延伸的中间区段和在两侧毗邻中间区段的端部区域,其中,中间区段穿过齿轮,并且其中,端部区域与中间区段分别占据在0度至90度之间的角度,并且其中,端部区域中的每个接合到所配属的、尤其弓形地构造的铰接件的引导槽中,所述铰接件绕摆动轴线能够摆动运动地支承在与齿轮支架连接的铰接支架处,其中,铰接支架中的每个绕相应的支架轴线能够摆动运动地支承在齿轮支架处。
背景技术:
2.从de 10 2013 004 188 a1中已知一种用于能够运动地连接两个构件的耦联装置。所述耦联装置包括用于安置在第一构件处的第一铰接件和用于安置在第二构件处的第二铰接件,其中,铰接件能够摆动运动地与彼此连接,并且其中,为了将第一铰接件与第二铰接件运动耦联,设置有曲轴,所述曲轴绕旋转轴线能够转动地支承在第一铰接件中,并且所述曲轴与第二铰接件耦联,其中,在曲轴和第二铰接件之间的力传递设置在耦联位置处。
技术实现要素:
3.本发明的任务在于,提供一种传动机构组件,所述传动机构组件具有简化的构造方式。
4.所述任务对于开头提及的类型的传动机构组件借助权利要求1的特征来解决。在此设置成,铰接支架与耦联支柱连接,其中,在齿轮支架处布置有用于提供调整运动的调整装置,其与耦联支柱运动耦联。
5.在此,耦联支柱的功能在于同步摆动运动,铰接支架能够绕相应的支架轴线相对于齿轮支架执行所述摆动运动。示例性地设置成,齿轮支架设有两个铰接支架,并且耦联支柱与这两个铰接支架分别能够摆动运动地耦联。优选地,在铰接支架中的每个处沿摆动轴线的延长部构造有铰接轴颈,其接合到耦联支柱的合适的凹部中或设有球形活节,所述球形活节接纳在耦联支柱的合适的凹部中。
6.此外设置成,耦联支柱配属有调整装置,其构造成用于将摆动运动或线性运动引入到耦联支柱上。优选地,调整装置涉及电的传动机构马达,在其从动轴处能够提供摆动运动。从动轴能够要么直接与耦联支柱连接要么设有控制杠杆,所述控制杠杆与耦联支柱耦联。调整装置例如能够与控制电子设备连接,所述控制电子设备构造成用于接收远离地布置的远程控制设备的经无线传输的控制信号,由此通过操作远程控制设备的用户来实现以无接触的方式影响调整装置。
7.在将构造为电的传动机构马达的调整装置的从动轴与耦联支柱直接耦联的情况下,支撑在齿轮支架处的调整装置能够将摆动运动引入到耦联支柱上。优选地,调整装置与
耦联支柱的运动耦联以及耦联支柱与铰接支架的运动耦联如此与彼此相协调,使得调整装置的调整运动导致这两个铰接支架的以相应相同的角度数值的相反的摆动运动。由此,在将所述传动机构组件应用在扑翼式飞行器中时,如果此外假设铰接件中的每个都与扑翼耦联,那么能够对扑翼式飞行器的飞行方向施加有利的影响,所述扑翼构造成用于产生用于扑翼式飞行器的升力和推进力。
8.本发明的有利的改进方案是从属权利要求的主题。
9.适宜的是,摆动轴线与齿轮轴线占据在70度至90度之间的角度,和/或支架轴线与齿轮轴线占据在0度至30度之间的角度,和/或支架轴线以一间距、尤其消失的间距平行于齿轮轴线地进行布置。在摆动轴线横向于齿轮轴线、也就是说以90度的角度取向时,能够从如下出发,即在曲轴绕齿轮轴线统一地旋转运动时,进行铰接件绕摆动轴线的、以正弦形的速度走向的、振荡的摆动运动。通过改变在摆动轴线与齿轮轴线之间的角度,在曲轴绕齿轮轴线的统一的旋转运动的前提下导致在针对铰接件的沿两个彼此相对的摆动方向的摆动运动的速度走向方面的不同。所述不同的速度走向能够例如用于优化与铰接件耦联的扑翼的扑动走向。这以类似的方式适用于与支架轴线相对于齿轮轴线的平行的、尤其同轴的取向的偏差。如果支架轴线平行于齿轮轴线进行取向,则通过选择在支架轴线和齿轮轴线之间的间距而存在有用于对用于铰接件相对于支架部件的速度走向施加影响的另外的可行性,由此同样能够执行对用于与铰接件连接的扑翼的扑动走向的优化。
10.在本发明的改进方案中设置成,耦联支柱绕横向于齿轮轴线取向的轴颈轴线能够摆动运动地布置在齿轮支架的支承轴颈处,其中,轴颈轴线与齿轮轴线相交。优选地设置成,轴颈轴线在中间与在铰接件的两个摆动轴线之间的间距直线相交。此外优选地设置成,在齿轮轴线和耦联支柱与相应的铰接件的耦联位置之间的间距是等同的。由此在耦联支柱的由调整装置促使的绕轴颈轴线的摆动运动的情况下能够进行这两个支架部件绕相应的支架轴线、以优选等同的角度数值的、相反的摆动运动。
11.在本发明的另外的设计方案中设置成,调整装置具有摆动杠杆,所述摆动杠杆经由控制支柱与耦联支柱铰接连接。优选地,调整装置构造为具有轮传动机构的电动马达,并且摆动杠杆固定在轮传动机构的从动轴处并且与此相应地在电动马达旋转时执行期望的摆动运动。控制支柱例如能够设计为拉压杆并且取决于安置在摆动杠杆处以及安置在耦联支柱处实现在摆动杠杆的摆动运动与耦联支柱的摆动运动之间选择运动增速或运动减速。
12.有利的是,齿轮支架在彼此相对的外表面处分别设有与齿轮轴线平行地、尤其同轴地取向的并且由曲轴穿过的支承轴颈,并且铰接支架能够摆动运动地支承在支承轴颈处。优选地,支承轴颈和铰接支架构造滑动支承件,借助所述滑动支承件确保铰接支架在齿轮支架处的能够摆动运动的支承。优选地设置成,在支承轴颈处并且在铰接支架处设置有彼此相对应的卡锁器件,借助所述卡锁器件能够实现在支承轴颈与铰接支架之间的沿齿轮轴线的方向形状配合的耦联。
13.适宜的是,铰接支架相对于彼此以固定的间距接纳在齿轮支架处,和/或铰接支架仅仅能够摆动运动地接纳在齿轮支架处。通过这种措施能够保证用于传动机构组件的构件的生产技术上有利的设计方案。与此相应地,铰接支架关于齿轮支架仅仅具有刚好一个旋转的运动自由度,而铰接支架相对于齿轮支架不具有平移的运动自由度。通过调整可行性的这种放弃,积极地影响传动机构组件的可制造性和稳定性。在相同的背景下设置成,铰接
件仅仅能够绕摆动轴线摆动运动地支承在铰接支架处。
14.在本发明的有利的改进方案中设置成,铰接件的引导槽凹槽形地进行构造并且由曲轴的端部区域穿过,其中,引导槽在横向于端部区域的延伸部地取向的横截面平面中具有矩形的横截面。通过引导槽的凹槽形的设计方案,对于曲轴的每个旋转位置保证与铰接装置的强制耦联。曲轴的端部区域始终贴靠在引导槽的优选平坦地构造的侧壁处,在传动机构组件的根据规定的使用中不设置所述端部区域的从引导槽中出来的偏离运动。通过引导槽的矩形的设计方案,结合铰接件的优选弓形的设计方案,在曲轴的旋转运动期间对于铰接件保证优选至少几乎正弦形的运动过程。
15.在本发明的另外的设计方案中设置成,包括齿轮轴线的、横向于摆动轴线取向的剖切平面相对于引导槽的中心具有间距、尤其消失的间距。由此实现,在用于曲轴的恒定的转速的情况下,执行铰接件的具有至少几乎等同的速度走向的、相应相反的摆动运动。这尤其适用于如下情况,即在剖切平面与引导槽的中心之间的间距消失。在备选的实施方式中能够设置成,通过预设在剖切平面与引导槽的中心之间的间距,对用于铰接件的相反的摆动运动的速度走向进行影响。这尤其当设置有用于所述间距的调节可行性时是适用的。
附图说明
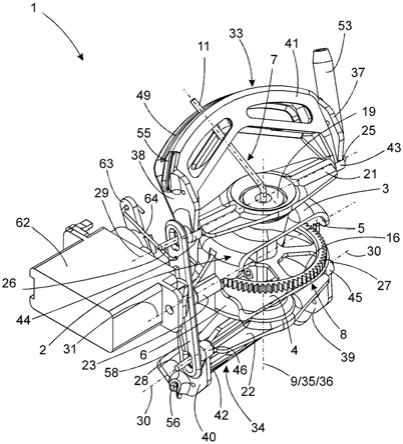
16.随后,根据附图更详细地阐述本发明,在此:图1示出用于扑翼式飞行器的传动机构组件的透视图,图2示出朝着根据图1的传动机构组件的俯视图,图3示出朝着根据图1和2的传动机构组件的侧视图,以及图4示出朝着根据图1至3的传动机构组件的前视图。
具体实施方式
17.在图1至4中示出的传动机构组件1设置成用于应用在未更详细示出的扑翼式飞行器、尤其扑翼机中。所述扑翼式飞行器尤其能够涉及鸟类的逼真的模型,所述模型例如能够借助未示出的电驱动器以及同样未示出的无线电远程控制装置来运行和控制。
18.传动机构组件1的任务在于,将未示出的驱动马达、尤其电动马达的旋转运动转换成铰接件33、34的上扑运动和下扑运动的优选统一的序列,所述铰接件能够摆动运动地安置在传动机构组件1的齿轮支架2处。铰接件33、34本身能够设有未更详细地示出的机翼装置,所述机翼装置能够模拟鸟类翅膀,以便能够在铰接件33、34的上扑运动和下扑运动的范围中为未示出的扑翼式飞行器提供升力以及推进力。
19.纯示范性地,齿轮支架2被构造为具有基本上矩形的轮廓成型部的型材部件并且在此包括第一侧壁3、第二侧壁4、前壁5和背壁6。第一侧壁3和第二侧壁4由曲轴7的中间区段15穿过,所述中间区段沿着齿轮轴线9以直线的方式延伸并且齿轮8抗转动地固定在所述中间区段处。
20.在此,齿轮8的齿圈16至少基本上平行于齿轮支架2的第一和第二侧壁3、4地进行取向并且具有至少几乎相应于在前壁5和背壁6之间的间距的直径。
21.毗邻于中间区段15,曲轴7具有第一端部区域11以及第二端部区域12,其分别纯示范性地直线地进行构造并且以与齿轮轴线9的锐角17、18相对于中间区段15进行弯折,如这
尤其能够从图2的视图中看出的那样。示例性地,中间区段15和第一端部区域11以及第二端部区域12布置在共同的、未示出的平面中。此外设置成,这两个锐角17、18具有相同的数值然而具有不同的符号。在观察图2时,在曲轴7的在那里示出的位置中,示例性地,第一端部区域11以角度17相对于齿轮轴线9逆时针弯折,而第二端部区域12以角度18相对于齿轮轴线9顺时针弯折。
22.如从图1和2的视图中进一步得出的是,第一支承轴颈19从第一侧壁3出发沿着齿轮轴线9延伸,所述第一支承轴颈优选与第一侧壁3一件式地构造。此外,第二支承轴颈20从第二侧壁4出发沿着齿轮轴线9沿与第一支承轴颈19相反的方向延伸,所述第二支承轴颈优选与第二侧壁4一件式地构造。这两个支承轴颈19、20中的每个都由曲轴7穿过并且在背离相应的第一或第二侧壁3、4的端部区域处承载第一铰接支架21或第二铰接支架22。不仅第一铰接支架21而且第二铰接支架22分别绕纯示范性地与齿轮轴线9同轴地取向的第一支架轴线35或第二支架轴线36能够摆动运动地接纳在相应的第一支承轴颈19或第二支承轴颈20处,并且因此能够在两个彼此平行地取向的、未示出的摆动平面中执行摆动运动。
23.第一铰接支架21在彼此相对地取向的端部区域处设有支承销25、26,所述支承销确定第一摆动轴线29,其中,优选地设置成,第一摆动轴线29与齿轮轴线9相交,尤其与齿轮轴线9成直角地进行取向。第二铰接支架22在彼此相对地取向的端部区域处设有支承销27、28,所述支承销确定第二摆动轴线30,其中,优选地设置成,第二摆动轴线30与齿轮轴线9相交,尤其与齿轮轴线9成直角地进行取向。在传动机构组件的未示出的实施方式中能够设置成,摆动轴线29、30分别与齿轮轴线9以不同于90度的角度进行取向。
24.第一支承销25、26用于第一铰接件33的能够摆动运动的支承,所述第一铰接件基本上u形地被轮廓成型。纯示范性地设置成,第一铰接件33具有两个彼此平行地取向的u形支脚37、38,所述u形支脚分别在端侧设有支承套筒43、44,其中,相应的支承套筒43、44包围相应的支承销25或26,由此分别构造能够摆动运动的滑动支承件。这两个u形支脚37、38由纯示范性地以圆环区段的类型弓形地进行构造的第一连接区段41与彼此连接,所述第一连接区段由凹槽形地构造的第一引导槽49穿过。曲轴7的第一端部区域11接合到第一引导槽49中。纯示范性地设置成,第一引导槽49在未示出的、横向于第一端部区域11地取向的横截面平面中具有矩形的横截面。纯示范性地,在第一u形支脚37处构造有第一接纳套筒53,所述第一接纳套筒构造成用于接纳同样未示出的机翼组件的未示出的承载支柱。纯示范性地,在第二u形支脚38处构造有第一接纳凹槽55,所述第一接纳凹槽构造成用于接纳同样未示出的机翼组件的未示出的耦联支柱。
25.第二铰接件34与第一铰接件33镜像等同地进行构造并且以相同的方式支承在相对应的铰接支架22处,从而能够不再重复关于其进行说明。
26.在齿轮支架2的背壁6处布置有第三支承轴颈23,所述第三支承轴颈沿着轴颈轴线31延伸,所述轴颈轴线横向于齿轮轴线9取向并且所述轴颈轴线纯示范性地然而不是必要地与齿轮轴线9相交。
27.第三支承轴颈23用于耦联支柱58的能够摆动运动的支承,所述耦联支柱相应地在端侧由第一铰接支架21或第二铰接支架22的支承部位(lagerst
ä
tten)26或28穿过。耦联支柱58用于第一铰接支架21与第二铰接支架22的能够摆动运动的强制耦联。优选地设置成,在第一摆动轴线29与轴颈轴线31之间的第一间距59以及在第二摆动轴线30与轴颈轴线31
之间的第二间距60等同,由此,耦联支柱58绕轴颈轴线31的摆动运动导致这两个铰接支架21、22以相同的角度数值和相反的摆动方向的相反的摆动运动。
28.为了将摆动运动引入到耦联支柱58上,纯示范性地设置有构造为电的传动机构马达组件的并且还被称为伺服机构的调整装置62,所述调整装置固定在齿轮支架2处。调整装置62包括摆动杠杆63,在将合适的电信号提供到调整装置62处时,所述摆动杠杆能够绕未更详细地示出的、平行于轴颈轴线31取向的摆动轴线进行摆动。还被称为挂舵臂(ruderhorn)的摆动杠杆63经由拉压杆64与耦联支柱58运动耦联,从而摆动杠杆63的摆动运动导致耦联支柱58的相对应的、必要时经运动减速的摆动运动。
29.传动机构组件1的根据规定的使用能够如下地进行说明:传动机构组件1纯示范性地布置在扑翼式飞行器的未示出的机身中,其中,铰接件33、34设有未示出的机翼布置。此外,齿轮8在作用连接中被带到与同样未示出的驱动器的作用连接中,所述驱动器例如能够涉及电的传动机构马达,从而能够进行驱动运动到齿轮8上的引入。此外设置成,调整装置62与未示出的控制装置连接并且由所述无线电接收器供给以调整信号,所述控制装置能够例如涉及无线电远程控制设备的无线电接收器,以便能够执行摆动杠杆63和与其耦联的耦联支柱58的摆动运动。
30.在将驱动运动引入到齿轮8上时,曲轴7绕齿轮轴线9进行旋转运动,其中,第一和第二端部区域11、12由于其相对于齿轮轴线9进行弯折而执行如下运动,所述运动能够通过与齿轮轴线9同轴地取向的圆锥曲面来说明。因为曲轴7的第一和第二端部区域11、12接合到第一和第二铰接件33、34的相应的第一和第二引导槽49、50中,由此在第一第二端部区域11、12与第一和第二铰接件33、34的运动之间存在强制耦联,所以对于第一和第二铰接件33、34中的每个得出绕相应的第一摆动轴线29或第二摆动轴线30的振荡的摆动运动。优选地,第一连接区段41以及第二连接区段42的弓形的弯曲部与曲轴7和其第一和第二端部区域11、12的几何结构如此相协调,使得第一和第二铰接件33、34在恒定的曲轴运动的前提下执行具有正弦形的速度分布的摆动运动。
31.原则上从如下出发,耦联支柱58首先平行于齿轮轴线9取向,由此在未示出的、与相应的第一和第二铰接件33、30耦联的机翼组件的同样类型的实施方案中得出到扑翼式飞行器上的对称的力分布。优选地,未示出的机翼组件如此进行设计,使得由未示出的机翼组件的上扑运动和下扑运动的序列得出的到扑翼式飞行器上的合力不仅包括升力分量而且包括推进力分量。
32.为了实现对未示出的扑翼式飞行器的飞行方向施加影响,借助于调整装置62能够实行首先彼此平行地取向的第一和第二摆动轴线29、30的空间上的取向的改变。为此,将摆动运动从调整装置62引入到耦联支柱58上,由此得出这两个铰接支架、即第一和第二铰接支架21和22的相反的摆动,所述相反的摆动导致在相应的未示出的机翼组件处的不同的升力和推进力,所述机翼组件配属于第一和第二铰接件33、34。与此相应地,由此改变到扑翼式飞行器上的合力的空间上的取向,由此引起用于扑翼式飞行器的期望的方向改变。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。