1.本发明属于涡旋机轴向力平衡控制技术领域,具体涉及涡旋机电磁轴向动态密封优化控制方法。
背景技术:
2.涡旋压缩机作为一种近直驱的旋转形容积式压缩机,具有压力稳定,效率高,振动小,噪声低,零部件少等优点,但是涡旋压缩机动、静涡盘之间的内部压缩腔在工作时,受到轴向气体分离力的作用,该气体力会使动、静涡盘具有分离趋势,且该气体分离力随着转动角度、排气口压力的不同而不同。
3.涡旋压缩机在吸气排气过程中,各个压缩腔内气体会对动静涡盘产生一个推力,使动静涡盘分离,这个推力之和,就是气体分离力。气体分离力过大,会使动静涡盘分离,增加轴向间隙,造成气体径向泄露。
4.目前,针对改善涡旋压缩机轴向力平衡方法,有采用弹簧背压式、推力轴承式、气体背压式、背压腔注入润滑油、轴向随变机构,在静涡旋盘的背面设置密封组件形成背压腔等。但是轴向气体分离力随主轴转角变化呈现大幅度变化,这些方案动态响应慢,难以满足对改善气体泄漏的高精度高动态性能要求。
5.而针对动态响应慢,难以满足对改善气体泄漏的高精度高动态性能要求的问题,目前采用电磁力来平衡涡旋机气体分离力,具有结构简单且动态响应快的优点。
6.然而,采用涡旋机轴向力电磁平衡控制方法同样还存在以下问题:
7.采用的自适应pid提前跟踪算法虽然优化了滞后问题,改善了滞后导致的泄露和磨损问题,但是总存在单侧压力略微不足的缺陷,在高频率时,跟踪点位少时,影响会更加明显。
8.因此,设计一种能够以略过压方式确保动态接触密封以及提升涡旋机运行效率的涡旋机电磁轴向动态密封优化控制方法,就显得十分必要。
9.例如,申请号为cn201911241902.3的中国发明专利所述的涡旋机及其轴向背压动态控制方法、存储介质,所述方法包括如下步骤:在涡旋机稳定运行状态下,采用迭代法确定使力评价指标总体最优的提前步数;设置转速增量,获取不同转速对应的最优提前步数,生成“转速
‑
提前步数”曲线;检测当前时刻的排气压力及转角值,结合“轴向气体分离力
‑
转角
‑
排气压力”曲线,获取当前时刻的轴向气体分离力;根据当前转角值确定当前转速,结合“转速
‑
提前步数”曲线,确定提前步数n0;结合当前时刻的轴向气体分离力,对动涡盘进行提前步数为n0的pid超前控制。虽然可精确控制动涡盘的外部背压,从而平衡其内部气体分离力,但是其缺点在于,利用带铁芯的电磁力机构,在动态控制时,输入输出具有难以忽略的滞后特性,且随着频率的上升滞后相位更加明显。
技术实现要素:
10.本发明是为了克服现有技术中,目前的轴向电磁动态密封控制方法存在单侧压力
不足,尤其在高频率时,跟踪点位少时,影响会更加明显的问题,提供了一种能够以略过压方式确保动态接触密封以及提升涡旋机运行效率的涡旋机电磁轴向动态密封优化控制方法。
11.为了达到上述发明目的,本发明采用以下技术方案:
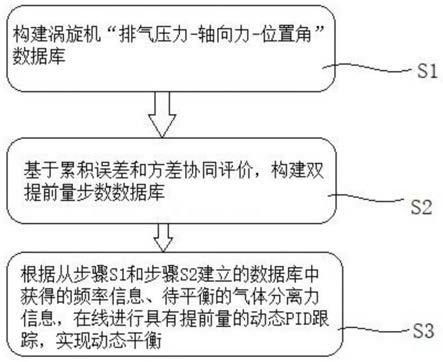
12.涡旋机电磁轴向动态密封优化控制方法,包括以下步骤:
13.s1,构建涡旋机“排气压力
‑
轴向力
‑
位置角”数据库;
14.s2,基于累积误差和方差协同评价,构建双提前量步数数据库;
15.s3,根据从步骤s1和步骤s2建立的数据库中获得的频率信息、待平衡的气体分离力信息,在线进行具有提前量的动态pid跟踪,实现动态平衡。
16.作为优选,步骤s2包括如下步骤:
17.s21,执行双提前量步数搜索算法;
18.s22,得到目标曲线上升、下降段最优提前量;
19.s23,将得到的上升、下降段最优提前量保存为“跟踪频率
‑
双提前量”数据库。
20.作为优选,步骤s21中,所述双提前量步数搜索算法包括如下步骤:
21.s21,获得曲线峰值处于最小值处主轴转角,确定上升下降段转角范围并设定整体提前量=0,上升下降段步长差m=1,最大提前角=358,上升提前量=整体提前量 m,下降段提前量=整体提前量;
22.s22,运行n个周期,求上升、下降段平均累积误差,n≥1且为正整数;
23.s23,若上升段累积误差<0且下降段累积误差<0,则保存上升段提前量和下降段提前量,计算误差方差,同时整体提前量加一;若不满足上升段累积误差<0且下降段累积误差<0,则直接整体提前量加一
24.s24,判断整体提前量是否大于最大提前角,若否,则返回步骤s22;若是,则对误差方差排序,筛选出最优双提前量。
25.作为优选,步骤s3还包括如下步骤:
26.在在线进行的动态平衡过程中,提出在目标曲线上升、下降段分别用不同提前量自适应分段提前跟踪方法。
27.作为优选,所述在目标曲线上升、下降段分别用不同提前量自适应分段提前跟踪方法包括如下步骤:
28.s31,系统先获取目标跟踪曲线上升、下降段转角范围,再根据系统设定的跟踪频率,查询“跟踪频率
‑
双提前量”数据库,得到上升段提前量和下降段提前量;
29.s32,实时获取当前涡旋机主轴转角,根据涡旋机主轴转角位于上升段还是下降段转角区间,来匹配对应的提前量。
30.作为优选,步骤s32中所述提前量为轴向气体分离力;所述轴向气体分离力作为目标平衡力。
31.作为优选,所述在目标曲线上升、下降段分别用不同提前量自适应分段提前跟踪方法还包括如下步骤:
32.s33,所述pid跟踪目标平衡力;
33.s34,当系统收到停止指令时,系统停止运作并关闭所有输出。
34.本发明与现有技术相比,有益效果是:(1)本发明采用双提前量pid提前跟踪平衡
方法,能够比单提前量pid提前跟踪控制算法拥有更好的密封性,避免了单侧略欠压的情况,全周期均以略过压方式确保动态接触密封;(2)本发明随着频率的提高,效果愈加明显,有助于涡旋机实现精确的近零正压力动态接触密封,提升涡旋机运行效率。
附图说明
35.图1为本发明涡旋机电磁轴向动态密封优化控制方法的一种流程图;
36.图2为本发明中当平均累积误差>0时,实际目标电磁力的一种曲线示意图;
37.图3为本发明中当平均累积误差<0时,实际目标电磁力的一种曲线示意图;
38.图4为常规pid跟踪采集方法下,上升段累积误差和滞后角的一种关系曲线图;
39.图5为本发明中跟踪频率和滞后角的一种关系曲线图;
40.图6为本发明中构建双提前量步数数据库的一种流程图;
41.图7为本发明中双提前量步数搜索算法的一种流程图;
42.图8为本发明中在目标曲线上升、下降段分别用不同提前量自适应分段提前跟踪方法的一种流程图;
43.图9为本发明中“排气压力
‑
轴向力
‑
位置角”的一种关系曲线图。
具体实施方式
44.为了更清楚地说明本发明实施例,下面将对照附图说明本发明的具体实施方式。显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
45.实施例1:
46.如图1所示的涡旋机电磁轴向动态密封优化控制方法,包括以下步骤:
47.s1,构建涡旋机“排气压力
‑
轴向力
‑
位置角”数据库;
48.s2,基于累积误差和方差协同评价,构建双提前量步数数据库;
49.s3,根据从步骤s1和步骤s2建立的数据库中获得的频率信息、待平衡的气体分离力信息,在线进行具有提前量的动态pid跟踪,实现动态平衡。
50.其中,图9所示数据是现有经测试的历史数据,步骤s1是对图9所示曲线进行数字化,从而构建对应的数据库。
51.进一步的,步骤s2中所述累积误差和方差协同评价,包括如下步骤:
52.先初步搜索电磁力上升段和下降段的平均累积误差<0的提前角,再以误差方差为指标进一步筛选出误差方差最小的提前角。
53.以方差作为评价平衡效果的依据,只能确定两者较为接近,却无法判断是略小还是略大;
54.以累积误差作为评价平衡效果的标准可判断出过压或者密封性不足。
55.然而,若仅以累积误差作为评价依据,又会在任一跟踪频率单位周期内会得到两个最优结果。
56.因此,本发明提出“以累积误差和方差协同评价”平衡跟踪效果的评价方案。
57.当平均累积误差>0时,如图2所示,电磁力总体小于轴向气体分离力,涡旋机中的
动静涡盘分离趋势会随着平均累积误差的增大而增大,气体泄露程度也随之增大。
58.当平均累积误差<0时,如图3所示,电磁力总体大于轴向气体分离力,涡旋机中的动静涡盘接触趋势会随着平均累积误差绝对值的增大而增大,动静涡卷磨损程度也随之增大。
59.以累积误差作为评价平衡效果的标准可判断出涡旋机电磁轴向动态是处于过压或者密封性不足。
60.如图4所示为常规pid(不采用提前步的pid方法)跟踪采集某一固定排气压力下轴向气体分离力和主轴转角的关系曲线,得到的上升段累积误差和滞后角的关系曲线。采集多组跟踪频率和滞后角数据,绘制成曲线如图5所示。
61.从图5可知,跟踪频率越高,滞后角越大。因此图4可以转化成常规pid下上升段累积误差和跟踪频率的关系。
62.由图4可知,存在某一临界角度angletemp,当滞后角小于angletemp时,跟踪频率较低,上升段累积误差为正;当滞后角大于angletemp时,跟踪频率较高,上升段累积误差为负。
63.根据上述信息,进一步的,如图6所示,步骤s2包括如下步骤:
64.s21,执行双提前量步数搜索算法;
65.s22,得到目标曲线上升、下降段最优提前量;
66.s23,将得到的上升、下降段最优提前量保存为“跟踪频率
‑
双提前量”数据库。
67.构建双提前量步数数据库的核心“双提前量步数搜索算法”,如图7所示。其中运行的周期数n,流程图中以20个周期为例,实际实施时,可根据误差波动情况调节求平均的周期数。
68.所述双提前量步数搜索算法包括如下步骤:
69.s21,获得曲线峰值处于最小值处主轴转角,确定上升下降段转角范围并设定整体提前量=0,上升下降段步长差m=1,最大提前角=358,上升提前量=整体提前量 m,下降段提前量=整体提前量;
70.s22,运行n个周期,求上升、下降段平均累积误差,n≥1且为正整数;
71.s23,若上升段累积误差<0且下降段累积误差<0,则保存上升段提前量和下降段提前量,计算误差方差,同时整体提前量加一;若不满足上升段累积误差<0且下降段累积误差<0,则直接整体提前量加一
72.s24,判断整体提前量是否大于最大提前角,若否,则返回步骤s22;若是,则对误差方差排序,筛选出最优双提前量。
73.进一步的,步骤s3还包括如下步骤:
74.在在线进行的动态平衡过程中,提出在目标曲线上升、下降段分别用不同提前量自适应分段提前跟踪方法。
75.进一步的,如图8所示,所述在目标曲线上升、下降段分别用不同提前量自适应分段提前跟踪方法包括如下步骤:
76.s31,系统先获取目标跟踪曲线上升、下降段转角范围,再根据系统设定的跟踪频率,查询“跟踪频率
‑
双提前量”数据库,得到上升段提前量和下降段提前量;
77.其中,如图8所示,设定获得上升段主轴转角范围为[mink,maxk];获得下降段主轴
转角范围为[0,mink]、[maxk,359];得到的上升段提前量为angle1,下降段提前量为angle2。
[0078]
s32,实时获取当前涡旋机主轴转角,根据涡旋机主轴转角位于上升段还是下降段转角区间,来匹配对应的提前量。
[0079]
其中,设定获取的当前涡旋机主轴转角为angle。
[0080]
s33,所述pid跟踪目标平衡力;
[0081]
s34,当系统收到停止指令时,系统停止运作并关闭所有输出。
[0082]
进一步的,如图8所示,步骤s32中所述提前量为轴向气体分离力;所述轴向气体分离力作为目标平衡力。
[0083]
图8所示流程,是一种双提前量pid在线自适应跟踪控制方法。
[0084]
本发明提出了“以累计误差和方差协同评价”平衡跟踪效果的评价方案,以此为基础,提出了离线阶段的“基于协同评价的,双提前量数据库构建方法”。
[0085]
本发明在在线进行的动态平衡过程中,提出在目标曲线上升、下降段分别用不同提前量自适应分段提前跟踪的方法,以确保略以微过压方式进一步优化轴向动态接触密封效果。
[0086]
本发明采用双提前量pid提前跟踪平衡方法,能够比单提前量pid提前跟踪控制算法拥有更好的密封性,避免了单侧略欠压的情况,全周期均以略过压方式确保动态接触密封;本发明随着频率的提高,效果愈加明显,有助于涡旋机实现精确的近零正压力动态接触密封,提升涡旋机运行效率。
[0087]
以上所述仅是对本发明的优选实施例及原理进行了详细说明,对本领域的普通技术人员而言,依据本发明提供的思想,在具体实施方式上会有改变之处,而这些改变也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。