1.本发明涉及触感再现技术领域,具体地说是一种蓬松触感复现装置及方法和基于蓬松触感复现的网购方法。
背景技术:
2.评价服装的实用价值,首先需要感知其穿在身上的舒适性,只有穿着舒适,服装才有助于日常的工作生活;其次就是其外观,美观的服饰才会被选择购买。现如今人们购买服装主要是通过视觉感知其舒适性,根据眼睛看到的服装图片和一些特性数据,判断服装的蓬松感、粗糙感。因为图片拍摄的角度、光线差异以及特性数据无法量化的问题,实际的服饰触感往往与主观判断的触感有很大的出入。无法真实地感知服装的触感,这对选择一件舒适的,满足触感需求的服装来说是远不够的。因此,对柔软、蓬松等触感的再现研究就显得格外具有意义。
3.中国专利cn 111923034a公开了一种可变刚度的软体手指及其控制方法,指段中沿轴向设有磁流变液通道,通过指节上的电极控制磁场强度,进而控制磁流变液的硬度,使柔性手指兼顾刚性和柔性手指的优点,再现了手指的刚度和蓬松度。中国专利cn 105138223a公开了一种基于指套式力触觉交互装置的物体柔软度再现方法,通过控制压电致动器的振幅和振动节奏,分别模拟人手按压过程中作用力大小以及虚拟物体的软硬度特性,从而再现蓬松触感。
4.上述方法虽然再现了物体的蓬松度,但都是由单一变量控制所复现蓬松触感的蓬松程度,而物体受压后比常态下表现出的触感更紧实是周知的常识,由于现技术不能根据受压程度改变复现的触感的蓬松程度,因此不能准确地复现真实的蓬松触感。
技术实现要素:
5.有鉴于此,本发明针对上述现有技术存在的无法准确复现蓬松触感的技术问题,提供了一种能准确复现物体蓬松触感的装置及方法。
6.本发明的技术解决方案是,提供一种以下结构的蓬松触感复现装置,包括蓬松感复现基体、电磁装置、和支撑框架,所述蓬松感复现基体位于所述电磁装置的上方;所述蓬松感复现基体内设有磁流变液,多个所述蓬松感复现基体置于弹力聚合物网格内,并在多个所述蓬松感复现基体敷设有橡胶膜,所述弹力聚合物网格置于限定框内,所述限定框置于上板上,所述上板置于所述支撑框架上,所述电磁装置置于所述支撑框架内;通过调节流过所述电磁装置的电流以调节所述电磁装置对所述蓬松感复现基体内设有磁流变液的吸引力;根据蓬松触感特性值,设定流过电磁装置的电流和所述弹力聚合物网格的初始高度,从而复现蓬松触感。
7.可选的,它还包括压力传感器和监测仪,所述压力传感器设置于所述蓬松感复现基体底部,所述监测仪设置于所述上板上,所述压力传感器用于采集各个所述蓬松感复现
基体下方的压力数据,并将所述压力数据传输给所述监测仪,以监测所述蓬松感复现基体所受压力的变化率。
8.可选的,所述蓬松感复现基体包括氯丁橡胶套管和磁流变液,所述橡胶膜为氯丁橡胶膜,所述氯丁橡胶套管的上表面与所述氯丁橡胶膜的下表面紧密相连,形成一个整体,所述氯丁橡胶套管下方与一个压力传感器相接触,所述磁流变液灌注于氯丁橡胶套管和所述氯丁橡胶膜之间的空腔中。
9.可选的,所述电磁装置包括在支撑框架的底板上均匀分布的若干个线圈和磁芯,所述线圈套设在磁芯上,所述线圈由电源通过监测仪供电。
10.可选的,所述限定框的内尺寸与所述弹力聚合物网格的外尺寸相同,用于限定弹力聚合物网格的位置,所述弹力聚合物网格呈波纹状,具有弹力可调的压缩性,其内部设有若干由上至下贯穿的蜂窝状方腔,方腔用于限定蓬松感复现基体的位置,每个蓬松感复现基体置于一个方腔中,所述弹力聚合物网格上方放置有一氯丁橡胶膜,所述氯丁橡胶膜下表面连接有若干蓬松感复现基体。
11.可选的,根据已知样本的蓬松触感特性值,获得复现该蓬松触感特性值所需的通过线圈的电流强度和所述弹力聚合物网格的初始高度,通过电源向线圈供电,以获得预期的电流强度,产生相应强度的磁场,向下按压氯丁橡胶膜,且蓬松感复现基体在被按压下移的过程中,按压所需的力逐渐增大,其中的磁流变液在向下位移的过程中,逐渐接近通电线圈,所受磁场强度逐渐增大,通过蓬松感复现基体能够感受到动态变化的蓬松触感。
12.本发明的第二技术解决方案是提供一种蓬松触感复现方法,基于一种蓬松触感复现装置,通过控制流经线圈的电流强度,改变线圈产生的磁场强度,以调整氯丁橡胶套管中磁流变液的屈服强度,与周边可调节高度的弹力聚合物网格的弹力复合,协同复现不同程度的蓬松触感;当蓬松感复现基体与弹力聚合物网格被人体感受器挤压时,压力传感器采集到压力数值传递给监测仪,从而得到复现蓬松触感呈现的实时压力值的变化速率所对应的蓬松触感特性值,并与真实蓬松触感对应的特性值进行比对,通过调整电流强度修正两者之间的误差,之后继续监测、修正,直到复现的蓬松触感所对应的蓬松触感特性值与真实蓬松触感所对应的蓬松触感特性值之间的误差被消除。
13.可选的,具体复现步骤如下:步骤一:由已知物体的蓬松触感的特性等级得到复现该蓬松触感所需要流经线圈的预期电流强度;步骤二:打开电源向线圈供电,使流经所述线圈的电流达到所述预期电流强度;步骤三:向下按压氯丁橡胶膜,使其向下产生形变,被按压部分下方的蓬松感复现基体被挤压,同时上板与氯丁橡胶膜间的弹力聚合物网格也被挤压,使用者能够感受到蓬松触感,通过改变线圈的电流强度及弹力聚合物网格的初始高度,使用者能够感受到不同程度的蓬松触感,蓬松感复现基体和弹力聚合物网格两者在被按压下移的过程中,按压所需的力逐渐增大,使用者在这个过程中能够感受到动态变化的蓬松触感;步骤四:监测仪监测蓬松感复现基体传递给上板的压力值变化速率,比对该值对应的蓬松触感特性值与真实的蓬松触感特性值是否一致,若不一致,则改变电流强度,进而改变线圈产生的磁场强度,直到复现的蓬松触感与真实蓬松触感之间的误差被消除,实现
通过控制参数实时反馈修正复现的蓬松触感以及蓬松触感的动态复现。
14.可选的,所述蓬松触感的特性值由蓬松触感量化装置测试得出,通过计算或模拟建立所述蓬松触感的特性值与通过线圈的电流强度的关系。
15.本发明的第三技术解决方案是提供一种基于蓬松触感复现的纺织品网购方法,在网购界面标注蓬松触感特性值,用户基于蓬松触感复现装置,对所述蓬松触感特性值进行触感复现,以辅助纺织物品的选购和决策;所述蓬松触感特性值同时传递给虚拟现实系统,在虚拟现实环境中构建蓬松触感特性值对应的纺织品,通过蓬松触感复现装置和虚拟现实系统,将触觉与视觉同时复现给用户,让用户网购纺织品时有现场触觉与视觉感受的体验。
16.本发明与现有技术相比,具有以下优点:采用本发明,能让人主动地感知到真实的蓬松触感,而不是通过视觉和物体特性判断纺织品的蓬松触感,且该蓬松触感会随着按压程度的增大而变得紧实,与真实物体受压时的状态相似,能准确复现蓬松触感,可以应用于纺织品等行业,实现蓬松触感的远程感知,并可应用于网购的辅助决策,所述蓬松触感特性值同时传递给虚拟现实系统,在虚拟现实环境中构建蓬松触感特性值对应的纺织品,通过蓬松触感复现装置和虚拟现实系统,将触觉与视觉同时复现给用户,让用户网购纺织品时有现场感受的体验。
附图说明
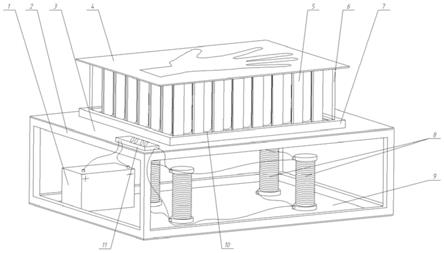
17.图1为本发明蓬松触感复现装置的等轴测视图。
18.图2为本发明蓬松触感复现装置的正视图。
19.图3为蓬松感复现基体的结构示意图。
20.图中:电源1、支撑框架2、上板3、氯丁橡胶膜4、蓬松感复现基体5、弹力聚合物网格6、限定框7、线圈8、底板9、压力传感器10、监测仪11、氯丁橡胶套管12、磁流变液13。
具体实施方式
21.下面结合附图和具体实施例对本发明作进一步说明。
22.本发明涵盖任何在本发明的精髓和范围上做的替代、修改、等效方法以及方案。为了使公众对本发明有彻底的了解,在以下本发明优选实施例中详细说明了具体的细节,而对本领域技术人员来说没有这些细节的描述也可以完全理解本发明。此外,本发明之附图中为了示意的需要,并没有完全精确地按照实际比例绘制,在此予以说明。
23.如图1
‑
3所示, 本发明的一种蓬松触感复现装置,包括电源1、支撑框架2、上板3、氯丁橡胶膜4、蓬松感复现基体5、弹力聚合物网格6、限定框7、线圈8、底板9、压力传感器10和监测仪11,所述电源1、支撑框架2和线圈8均固定于底板9上,其中线圈8包括在底板9上均匀分布的若干个线圈,所述上板3固定于支撑框架2上,所述限定框7和监测仪11固定于上板3的上表面,所述监测仪11实时监测蓬松感复现基体5传递给上板3的压力,并调节通过线圈8的电流强度,所述限定框7的内尺寸与弹力聚合物网格6的外尺寸相同,用于限定弹力聚合物网格6的位置,所述弹力聚合物网格6总体呈波纹状,具有压缩性,弹力能够调节,放置于限定框7内,其内部设有若干由上至下贯穿的方腔,方腔用于限定蓬松感复现基体5的位置,每个蓬松感复现基体5置于一个方腔中,所述弹力聚合物网格6上方放置有一氯丁橡胶膜4,所述氯丁橡胶膜4下表面连接有若干蓬松感复现基体5,所述蓬松感复现基体5包含氯丁橡
胶套管12和磁流变液13,所述氯丁橡胶套管12的上表面与氯丁橡胶膜4的下表面紧密相连,形成一个整体,氯丁橡胶套管12下方与一个压力传感器10相接触,所述磁流变液13灌注于氯丁橡胶套管12和氯丁橡胶膜4之间的空腔中。
24.本装置具体复现步骤为:先由已知物体的蓬松触感的特性值计算得到复现这种蓬松触感时所需的通过线圈的电流强度,之后打开电源通过监测仪向线圈中提供计算得到的电流,产生指定强度的磁场,然后使用者接触并向下按压氯丁橡胶薄膜,由于在复现不同蓬松触感时磁流变液所受到的磁场强度都不同,即蓬松感复现基体的屈服强度不同,且蓬松感复现基体在被按压下移的过程中,按压所需的力逐渐增大,其中的磁流变液在向下位移的过程中,逐渐接近通电线圈,所受磁场强度逐渐增大,通过蓬松感复现基体能够感受到动态变化的蓬松触感。
25.所述蓬松触感的特性值由蓬松触感量化装置测试得出,通过计算或模拟建立所述蓬松触感的特性值与通过线圈的电流强度和弹力聚合物网格初始高度的关系。
26.下面以一个具体的实施例来进一步说明本发明。
27.选用5种已知蓬松触感特性值的典型样本,其蓬松触感特性值计算得到复现它们的蓬松触感时所需通过线圈的电流强度和弹力聚合物网格初始高度,样本蓬松触感特性值、对应的弹力聚合物网格初始高度h及通过线圈的电流强度i如表1所示。
28.表1:样本蓬松触感特性值、对应的压力变化率及控制参数之后打开电源通过监测仪向线圈中提供计算得到的电流,产生指定强度的磁场使蓬松感复现基体屈服强度发生改变,然后使用者接触并向下按压氯丁橡胶薄膜,各蓬松感复现基体下方的压力传感器采集数据,比对该压力的平均变化率对应的蓬松触感特性值与真实的蓬松触感特性值是否一致,若不一致,则修正控制参数,并继续监测,直到使用者感受到的复现的蓬松触感与真实蓬松触感之间的误差被消除,感受完毕后,关闭电源,一次模拟结束。
29.以上仅就本发明较佳的实施例作了说明,但不能理解为是对权利要求的限制。本发明不仅局限于以上实施例,其具体结构允许有变化。总之,凡在本发明独立权利要求的保护范围内所作的各种变化均在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。