1.本发明涉及一种露天矿山的多车同时卸载作业控制系统及方法,属于露天矿山无人驾驶技术领域。
背景技术:
2.国内外的露天矿山地处偏远,环境恶劣,矿区运输车辆作业司机老龄化趋势明显,由运输司机疏忽导致的安全事故频出,未来矿区在生产安全、人员投入等方面的经济负担将日益增加,露天矿山无人化运输解决方案在矿区迫切需求和现代科技发展的推动下,开始崭露头角。然而,露天矿山的作业管理特殊性和复杂性,导致露天矿山无人化系统的实现面临诸多技术挑战,如何能够提高作业效率是无人化系统技术的问题之一,其中提高卸载作业的效率也是提高整体作业效率的其中一环。
技术实现要素:
3.本发明的目的在于克服现有技术中的不足,提供一种露天矿山的多车同时卸载作业控制系统及方法,解决露天矿山的卸载作业的效率和安全性的技术问题。
4.为达到上述目的,本发明是采用下述技术方案实现的:
5.第一方面,本发明提供了一种露天矿山的多车同时卸载作业控制方法,包括:
6.当接收到无人矿车的入场请求时,确定所述无人矿车到达卸载入场点;
7.判断是否有入场或出场的无人矿车,若是,则当前无人矿车加入入场等待队列;
8.若否,则判断当前无人矿车的目标卸载点是否有卸载的无人矿车;若是,则当前无人矿车加入入场等待队列;
9.若否,则判断卸载区内处于卸载作业的无人矿车的数量是否大于预设阈值,若是,则当前无人矿车加入入场等待队列;
10.若否,则下发航向数据至当前无人矿车,当前无人矿车根据航向数据到达相应的卸载点并进行卸载作业;
11.当接收到当前无人矿车的出场请求时,确定当前无人矿车卸载作业完成;
12.判断是否有入场或出场的无人矿车,若是,则当前无人矿车加入出场等待队列;
13.若否,则下发航向数据至当前无人矿车,当前无人矿车根据航向数据出场。
14.优选的,所述出场等待队列的优先级高于入场等待队列的优先级。
15.优选的,所述无人矿车实时上传工作状态,所述工作状态包括入场状态、出场状态、卸载状态、入场等待状态和出场等待状态。
16.优选的,根据所述入场状态、所述出场状态、所述入场等待状态和所述出场等待状态判断是否有入场或出场的无人矿车,根据所述卸载状态判断当前无人矿车的目标卸载点是否有卸载的无人矿车。
17.优选的,所述预设阈值为根据卸载区的面积范围、卸载点的数量以及卸载点的位置进行设置。
18.优选的,所述目标卸载点为根据无人矿车的尺寸以及与卸载区的挡土墙的距离位置选定的,选定条件满足:
19.无人矿车的后轮中心点的位置落在卸载区内,使得无人矿车2l/5货箱长度在挡土墙外侧,3l/5货箱长度在挡土墙内侧;
20.无人矿车的后轮中心线距挡土墙的距离为s米;
21.其中,l是后轮中心线到无人矿车最尾部的距离;s是无人矿车后轮中心线到挡土墙的距离,根据车体大小,s取1.5m,误差偏移量
△
d∈[
‑
0.5m,0.5m]。
[0022]
第二方面,本发明提供了一种露天矿山的多车同时卸载作业控制系统,包括机群管控系统、矿用卡车和以及设置于矿用卡车上的车辆终端系统,所述车辆终端系统与机群管控系统通讯连接;
[0023]
所述机群管控系统用于根据接收到无人矿车的入场请求或出场请求、判断是否有入场或出场的无人矿车、判断卸载区内处于卸载作业的无人矿车的数量是否大于预设阈值以及下发航向数据和控制指令;
[0024]
所述车辆终端系统根据航向数据和控制指令控制无人矿车加入入场等待队列或出场等待队列、到达相应的卸载点并进行卸载作业。
[0025]
优选的,所述车辆终端系统包括速度监测模块、导航定位模块和请求模块,所述速度监测模块用于监测无人矿车的车速;所述导航定位模块包括gps和惯性导航系统,所述gps用于监测无人矿车的位置信息,所述惯性导航系统用于接收机群管控系统下发的航向数据,根据航向数据控制无人矿车到达目标卸载点,所述请求模块用于发送入场请求和出场请求;
[0026]
所述机群管控系统包括计算机控制装置,所述计算机控制系统用于获取无人矿车的车速、位置信息、入场请求和出场请求,计算出航向数据和控制指令并下发至无人矿车以及出场。
[0027]
优选的,所述车辆终端系统还包括环境感知模块,所述环境感知模块包括激光雷达,所述激光雷达用于获取无人矿车周围环境数据,并上送给机群管控系统;所述激光雷达安装在无人矿车后方中心,用于检测障碍物和挡土墙。
[0028]
优选的,所述机群管控系统还包括无线远程急停系统,用于当无人矿车的导航定位模块、环境感知模块失效或突发紧急情况下,所述机群管控系统通过无线急停按钮发出停车指令给无线矿车进行紧急停车。
[0029]
与现有技术相比,本发明所达到的有益效果:
[0030]
本发明提供的一种露天矿山的多车同时卸载作业控制系统及方法,通过维护卸载区域作业车辆的入场等待队列和出场等待队列,同时监控车辆入场、卸载、出场作业任务状态变化,控制执行入场、出场和卸载任务的无人矿车数量,保证车辆的作业安全的同时,增加卸载区域同时进行卸载作业的车辆,从而提高卸载作业的效率,进而提高无人化系统整体的作业效率。
附图说明
[0031]
图1是本发明实施例提供的露天矿山废料卸载的排土场作业示意图;
[0032]
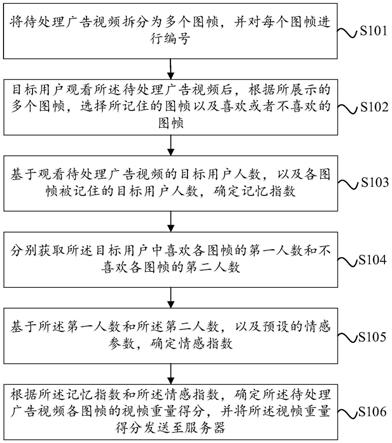
图2是本发明实施例提供的露天矿山的多车同时卸载作业控制方法的流程图;
[0033]
图3是本发明实施例提供的露天矿山的多车同时卸载作业控制系统示意图。
具体实施方式
[0034]
下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
[0035]
实施例一:
[0036]
如图1所示,本实施例主要应用于露天矿山废料卸载(表土、碎石、低品位矿石)的排土场的作业流程控制。在排土场范围允许的情况下,有序控制无人矿车入场、卸载、出场,不允许同时有多辆车进行入场或出场,避免发生碰撞。
[0037]
如图2所示,本实施例的一种露天矿山的多车同时卸载作业控制方法,包括以下步骤:
[0038]
当机群管控系统接收到无人矿车的入场请求时,确定所述无人矿车到达卸载入场点;
[0039]
机群管控系统判断是否有入场或出场的无人矿车,若是,则车辆终端系统控制当前无人矿车加入入场等待队列;
[0040]
若否,则机群管控系统判断当前无人矿车的目标卸载点是否有卸载的无人矿车;若是,则车辆终端系统控制当前无人矿车加入入场等待队列;
[0041]
若否,则机群管控系统判断卸载区内处于卸载作业的无人矿车的数量是否大于预设阈值,若是,则车辆终端系统控制当前无人矿车加入入场等待队列;
[0042]
若否,则机群管控系统下发航向数据至当前无人矿车的车辆终端系统,当前无人矿车根据航向数据到达相应的卸载点并进行卸载作业;
[0043]
当机群管控系统接收到当前无人矿车的出场请求时,确定当前无人矿车卸载作业完成;
[0044]
机群管控系统判断是否有入场或出场的无人矿车,若是,则车辆终端系统控制当前无人矿车加入出场等待队列;
[0045]
若否,则机群管控系统下发航向数据至当前无人矿车,当前无人矿车根据航向数据出场。
[0046]
其中,出场等待队列的优先级高于入场等待队列的优先级。
[0047]
无人矿车通过车辆终端系统实时上传工作状态,工作状态包括入场状态、出场状态、卸载状态、入场等待状态和出场等待状态。机群管控系统根据入场状态、出场状态、入场等待状态和出场等待状态判断是否有入场或出场的无人矿车,根据卸载状态判断当前无人矿车的目标卸载点是否有卸载的无人矿车。
[0048]
具体的,预设阈值为根据卸载区的面积范围、卸载点的数量以及卸载点的位置进行设置。
[0049]
目标卸载点为根据无人矿车的尺寸以及与卸载区的挡土墙的距离位置选定的,选定条件满足:
[0050]
无人矿车的后轮中心点的位置落在卸载区内,使得无人矿车2l/5货箱长度在挡土墙外侧,3l/5货箱长度在挡土墙内侧;
[0051]
无人矿车的后轮中心线距挡土墙的距离为s米;
[0052]
其中,l是后轮中心线到无人矿车最尾部的距离;s是无人矿车后轮中心线到挡土墙的距离,根据车体大小,s取1.5m,误差偏移量
△
d∈[
‑
0.5m,0.5m]。
[0053]
例如:
[0054]
第一辆无人矿车到达卸载区入场点时,向机群管控系统发送卸载入场请求;机群管控系统查询该卸载区作业情况,初始化入场等待队列和出场等待队列,并自动下发允许入场指令;第一辆无人矿车根据机群管控系统下发的规划数据自动循迹到指定卸载点;到达指定卸载点后,无人矿车向机群管控系统发送作业任务状态变更,并自动开始卸载作业。
[0055]
第二辆无人矿车到达卸载区入场点时,向机群管控系统发送卸载入场请求;机群管控系统查询该卸载区的作业情况,检查卸载区允许的最大同时卸载作业的阈值,检查该卸载区正在执行入场和出场任务的无人矿车,如果符合条件,则自动下发允许入场指令。不符合条件,则将无人矿车加入到入场排队队列中。
[0056]
第一辆无人矿车完成卸载,向机群管控系统发送出场请求;机群管控系统查询该卸载区作业情况,检查正在执行入场和出场任务的无人矿车,如果有车辆正在入场或出场,则将请求车辆加入到出场排队队列,如果没有,则下发允许出场指令。
[0057]
第二辆无人矿车到达卸载点,向机群管控系统发送作业任务状态变更;机群管控系统检查正在执行入场和出场任务的无人矿车,同时检查出场排队队列,如果有无人矿车等待出场,则向队列队头的车辆下发允许出场的指令;如果没有出场排队的车辆,则检查入场排队队列,如果有,则向该队列队头的车辆下发准许入场指令。
[0058]
第一辆无人矿车完成出场,向机群管控系统发送作业任务状态变更;机群管控系统检查正在执行入场和出场任务的无人矿车,同时检查出场排队队列,如果有无人矿车等待出场,则向队列队头的车辆下发允许出场的指令;如果没有出场排队的车辆,则检查入场排队队列,如果有,则向该队列队头的车辆下发准许入场指令。
[0059]
如果卸载区入场点已经有车辆在等待入场,后续车辆在入场点附近停车,机群管控系统根据该车辆位置、当前执行任务以及停车位置与入场点的距离是否在阈值范围内,判断该车辆是否应该加入到入场排队队列。
[0060]
在卸载作业流程中,每个子任务节点都需要检查排队队列,正在入场、出场的车辆情况和卸载区同时卸载的阈值,保证优先处理出场等待队列,清空场内排队的出场车辆,然后再处理入场等待队列。
[0061]
实施例二:
[0062]
如图3所示,本实施例的一种露天矿山的多车同时卸载作业控制系统,包括机群管控系统、矿用卡车和以及设置于矿用卡车上的车辆终端系统,车辆终端系统与机群管控系统通讯连接。机群管控系统用于根据接收到无人矿车的入场请求或出场请求、判断是否有入场或出场的无人矿车、判断卸载区内处于卸载作业的无人矿车的数量是否大于预设阈值以及下发航向数据和控制指令;车辆终端系统根据航向数据和控制指令控制无人矿车加入入场等待队列或出场等待队列、到达相应的卸载点并进行卸载作业以及出场。
[0063]
具体的,车辆终端系统包括速度监测模块、导航定位模块和请求模块,速度监测模块用于监测无人矿车的车速;导航定位模块包括gps和惯性导航系统,gps用于监测无人矿车的位置信息,惯性导航系统用于接收机群管控系统下发的航向数据,根据航向数据控制无人矿车到达目标卸载点,请求模块用于发送入场请求和出场请求;机群管控系统包括计
算机控制装置,计算机控制系统用于获取无人矿车的车速、位置信息、入场请求和出场请求,计算出航向数据和控制指令并下发至无人矿车。
[0064]
车辆终端系统还包括环境感知模块,环境感知模块包括激光雷达,激光雷达用于获取无人矿车周围环境数据,并上送给机群管控系统;激光雷达安装在无人矿车后方中心,用于检测障碍物和挡土墙。
[0065]
机群管控系统还包括无线远程急停系统,用于当无人矿车的导航定位模块、环境感知模块失效或突发紧急情况下,机群管控系统通过无线急停按钮发出停车指令给无线矿车进行紧急停车。
[0066]
本发明针对露天矿山无人化运输系统的卸载作业流程进行控制,在保证卸载区内车辆安全的同时,增加同时进行卸载作业的车辆,提高卸载作业效率,从而提高整个生产作业的效率。
[0067]
本领域内的技术人员应明白,本技术的实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可用存储介质(包括但不限于磁盘存储器、cd
‑
rom、光学存储器等)上实施的计算机程序产品的形式。
[0068]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。