技术特征:
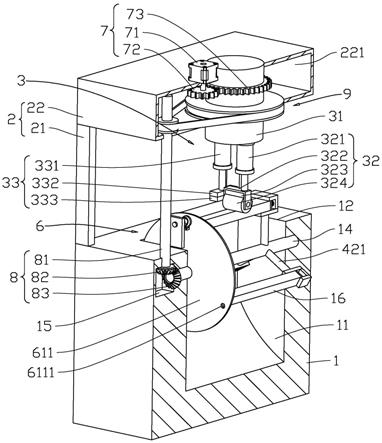
1.一种激光位移传感器自动化标定装置,其特征在于,包括水平基座(1),在所述水平基座(1)上沿其长度方向依次连接有激光位移传感器安装座(2)、运动台座(17)和激光干涉仪安装座(15),所述激光位移传感器安装座(2)上安装有激光位移传感器(3),所述激光干涉仪安装座(15)上通过激光干涉仪调整架(14)连接有激光干涉仪(13),所述运动台座(17)上滑动地连接有运动台面(16),所述运动台面(16)上设置有光束分析仪(8)、以及分别位于光束分析仪(8)两侧的被测物安装支架(7)和角锥镜安装板(9),在所述被测物安装支架(7)上的两个相对的表面上分别贴附有标准被测物(5)和半反半透镜(6),所述半反半透镜(6)与激光位移传感器(3)相对,用于接收激光位移传感器(3)的测量光束(4)并反射照射在标准被测物(5)的表面以及透射通过被测物安装支架(7)后照射在光束分析仪(8)的表面,所述角锥镜安装板(9)相对于激光干涉仪(13)的一侧面上设有角锥镜(10),所述激光干涉仪(13)的出光光束(11)照射到角锥镜(10)上后形成回光光束(12)并返回到激光干涉仪(13)产生干涉数据。2.根据权利要求1所述的激光位移传感器自动化标定装置,其特征在于,所述激光位移传感器(3)的测量光束(4)、激光干涉仪(13)的出光光束(11)和回光光束(12)均与运动台面(16)的滑动方向平行,并且所述激光位移传感器(3)的测量光束(4)与激光干涉仪(13)的出光光束(11)共线。3.根据权利要求2所述的激光位移传感器自动化标定装置,其特征在于,所述被测物安装支架(7)上开有通孔和45度的楔形槽,所述标准被测物(5)贴附于楔形槽的上侧内表面,所述半反半透镜(6)贴附于楔形槽的下侧内表面,所述被测物安装支架(7)的通孔轴线方向与测量光束(4)的方向一致,测量光束(4)照射到半反半透镜(6)上后,一部分光线被反射到标准被测物(5)上实现距离测量,另一部分光线通过通孔后照射到光束分析仪(8)上实现光斑形状测量,调整被测物安装支架(7)的高度与宽度,使得照射到标准被测物(5)与照射到光束分析仪(8)上的光束光程一致,从而保证线性标定与光斑测量的位置为测量光束(4)的同一位置。4.根据权利要求2所述的激光位移传感器自动化标定装置,其特征在于,所述激光干涉仪调整架(14)至少具有俯仰、偏摆和高度三个自由度的调整结构,通过调整激光干涉仪调整架(14)使得激光干涉仪(13)的出光光束(11)与激光位移传感器(3)的测量光束(4)共线。5.根据权利要求2所述的激光位移传感器自动化标定装置,其特征在于,所述激光位移传感器(3)通过与激光位移传感器安装座(2)之间的配合来控制测量光束(4)的方向。6.一种激光位移传感器自动化标定方法,其特征在于,该方法的具体标定过程如下:首先将待测试的激光位移传感器(3)安装于激光位移传感器安装座(2)上,再将上位机(18)与激光位移传感器(3)、光束分析仪(8)、激光干涉仪(13)与运动台面(16)连接;上位机(18)控制运动台面(16)运动使得标准被测物(5)位于激光位移传感器(3)的量程中心位置,分别将激光位移传感器(3)与激光干涉仪(13)的读数设置为0;上位机(18)控制运动台面(16)运动使得标准被测物(5)位于激光位移传感器(3)的量程起点位置,设定运动台面(16)的步进距离d与运动速度v,取激光位移传感器(3)的真实量程为d,则扫描过程会在激光位移传感器(3)的全量程中取n=d/d个位置作为采样点位;上位机(18)在量程起点位置对激光位移传感器(3)、光束分析仪(8)以及激光干涉仪(13)进行采样,并保存到上位机(18)中,采样完成后,控制运动台面(16)向量程远端运动步
进距离d,再次进行采样,重复该运动及采样步骤直至运动台面(16)运动到量程远端;采样完成后即获得各个采样点位下的激光位移传感器(3)与激光干涉仪(13)的位移测量偏差以及光束分析仪(8)的光斑数据。7.根据权利要求6所述的激光位移传感器自动化标定方法,其特征在于,所述激光干涉仪(13)用于测量出角锥镜(10)的位移,所述光束分析仪(8)用于测量出测量光束(4)截面的形状;根据所有采样点位的位移测量偏差来获取激光位移传感器(3)的线性度曲线;根据所有采样点位的光斑数据来获取测量光束(4)沿光轴的形状;通过减小步进距离d,提升采样点位n的数量,来更准确地测量出线性偏差曲线与光束形状。8.根据权利要求7所述的激光位移传感器自动化标定方法,其特征在于,在获取到所有采样点位下的激光位移传感器(3)与激光干涉仪(13)的测量数据后,通过多项式或样条曲线定量拟合出激光位移传感器(3)的测量数据相对于激光干涉仪(13)的测量数据的变化关系,然后通过等间隔采样生成标定曲线,上传到激光位移传感器(3)中,以显著提升激光位移传感器(3)的测量精度。9.根据权利要求7所述的激光位移传感器自动化标定方法,其特征在于,在获取到所有采样点位下的光束截面的光斑形状后,通过高斯函数拟合出光斑中心在光轴截面上两个垂直方向下的位置与光斑半径,其中;通过对进行最小二乘线性拟合来获取光束在x方向上的偏角;通过对进行最小二乘拟合来获得光束在y方向上的偏角;通过查找最小光斑半径对应的采样位置来获得测量光束(4)的聚焦位置;根据测量出的偏角与聚焦位置实现测量光束(4)的标定与快速调整。
技术总结
本发明是一种激光位移传感器自动化标定装置及方法,在运动台面两侧分别布置激光位移传感器与激光干涉仪,并在运动台面上布置光束分析仪以实现光斑测量,标定时,控制标准被测物由量程近端向量程远端步进运动,记录每个采样位置下的激光位移传感器数据、激光干涉仪数据以及光束分析仪数据,完成全量程扫描后,根据不同位置的激光位移传感器读数与激光干涉仪读数计算出线性偏差,以生成标定表进行校准;根据不同位置的截面光斑数据拟合出测量光束的形状及方向,以调整焦点、方向等参数。本发明可实现激光位移传感器的线性偏差与光束形状的单次扫描同时测量,适用于各种量程的激光位移传感器的标定,可显著提升标定精度与生产效率。效率。效率。
技术研发人员:刘钧 居冰峰 张文浩 戴霖 陈旺
受保护的技术使用者:苏州创视智能技术有限公司
技术研发日:2021.07.09
技术公布日:2021/11/4
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。