1.本发明涉及一种用于将活性成分施用到农作物上的无人机、用于无人机的基站、用于利用无人机和基站将活性成分施用到农作物上的系统和方法、通过无人机将活性成分施用到农作物上的方法以及利用基站为无人机服务的方法。
背景技术:
2.本发明的一般背景是将液体形式的活性成分施用到树叶上,是使用例如喷杆喷雾器通过机器使用的。活性成分(诸如除草剂、杀虫剂、杀菌剂、农药和营养补充剂)需要在农业环境中施用。控制作物中的杂草、昆虫和疾病是减少农业损失的重要要求。这通常是通过拖拉机、背负式喷雾器和无人机(uav)(诸如无人驾驶飞机和无线电控制的直升机)的喷洒施用对作物进行叶面喷洒来实现的。所有这些施用技术的缺点是例如典型地对整个田地都进行了喷洒。一般来说,需要改进对农田的喷洒实践并且以新的方式促进施用。这也是减少这种施用的成本的需求。公众也越来越希望看到与这种施用相关联的任何环境影响的减少。
技术实现要素:
3.改进在农业环境中施用活性成分的方式将是有利的。
4.本发明的目的是用独立权利要求的主题来解决的,其中更多的实施例并入从属权利要求。应当注意,本发明的下述方面和示例也适用于用于将活性成分施用到农作物上的无人机、用于一个或多个无人机的基站、用于利用无人机和基站将活性成分施用到农作物上的系统和方法、通过无人机将活性成分施用到农作物上的方法以及利用基站为无人机服务的方法。
5.根据第一方面,提供了一种用于将活性成分施用到农作物上的无人机,其包括:
6.‑
储液器。所述至少一个储液器被配置为保存包含活性成分的液体;以及
7.‑
至少一个液体施用单元。所述该至少一个液体施用单元与至少一个储液器流体连通,以及
8.‑
至少一个操作单元。所述该至少一个操作单元被配置为使无人机能够飞行;以及
9.‑
至少一个传感器单元。所述至少一个传感器单元被配置为确定感测信息,其包括感测以下一项或多项的功能:至少一个储液器、至少一个液体施用单元、至少一个操作单元。所述处理单元被配置为确定给无人机的与基站对接并且从基站获得服务的指令,其中确定包括感测信息的利用。
10.换言之,无人机(uav),诸如无人驾驶飞机,可以将包含在液体内的活性成分施用到植物上。uav现在有一个或多个传感器来检查uav的一个或多个部分的功能,这些部分需要用于将一种或多种活性成分施用到植物上。如果uav的部分的功能受到影响或在理想情况下,估计受到影响,例如因为储液器中的液体即将用完或液体施用单元被阻塞或堵塞或uav的动力单元(作为操作单元的部分)需要再充电或再填充,则指示uav对接到基站。在理
想情况下,基站在uav对接之前已经被通知了uav的功能状态,并且只要uav已经登记到基站,在理想情况下就会准备提供适当的服务(诸如储液器的再填充;动力单元的再充电或再填充)。此外,如果基站在uav对接之前已经被通知了uav的功能状态并且基站没有资源来为uav服务,则该信息通过处理单元使用——该处理单元可以是uav的部分或在uav外部——以将uav转向确实具有资源来为uav服务的另一个基站。在服务之后,uav可以返回记录的位置并且恢复喷洒施用。同时对uav的飞行路径进行优化,以最大化它们的飞行效率,并且最小化基站的瓶颈。基站本身可以是自主机器,能够自主移动到一系列位置,并且能够在不同的位置之间存储和运输一个或多个uav,从而允许一个或多个基站和一个或多个uav自主处理多个位置。
11.在示例中,处理单元被配置为确定给无人机的与基站对接并且用包含活性成分的液体再填充至少一个储液器和/或将至少一个储液器与被包含活性成分的液体至少部分地填充的储液器交换的指令,其中确定包括至少一个储液器内液位的感测信息的利用。
12.换言之,被配置为感测储液器内的液位的传感器单元将该信息(例如不时地或连续地)提交给处理单元,该处理单元也关于uav到下一个基站的距离分析装载在uav内或附接到uav的储液器内的剩余液体,其中可以再填充装载在uav内或附接到uav的储液器。液体施用单元与储液器流体连通,并且被配置为将储液器中的液体施用到植物上。如果确定装载在uav内或附接到uav的储液器需要再填充,则处理单元指示uav与基站对接。要被再填充到储液器中的有活性成分的液体可以作为稀释剂在水(该水是按照基站上的需要制备的)中施用,或uav包括至少两个储液器——一个有水,而另一个有活性成分浓缩液,并且稀释是在喷洒前不久发生在施用单元中的。另外,除了添加要被填充到uav的储液器中的液体或作为uav上的单独储液器,还可以使用一种或多种辅助剂。在喷洒前不久,辅助剂可以例如在施用单元中被添加到有活性成分的液体。可替代地,在喷洒前不久,水、活性成分浓缩液和辅助剂在液体施用单元中混合。另外,在通过基站上的服务单元再填充新液体之前,可以清洗装载到uav内或附接到uav的空储液器,这确保了uav的该部分的操作性,并且也允许用较低浓度的相同活性成分或不一定与空储液器中活性成分的残余部分兼容的其他活性成分再填充储液器。
13.装载在uav内或附接到uav的储液器也可以与另一个(至少部分地填充的储液器)交换,后者通常是基站上已经备有并且随时可用的满储液器(插入式储液器)。如果处理单元所做的更多分析表明另一种活性成分或其他浓度的相同活性成分或某些其他组合的活性成分更适合施用到剩下的(未经处理的)植物上,则当在基站再填充/交换储液器时,这一点也可以考虑在内。可替代地,如果已经检测到,已经喷洒过的植物确实有需要解决的附加问题,诸如例如之前还未检测到的新出现的害虫,则uav上的储液器可以与包括能够用来应付最近检测到的问题的活性组分的储液器交换——分别被清空和再填充,并且植物可以被再次喷洒。
14.当uav确实包括至少两个储液器时,有可能在基站用包含活性组分的液体再填充一个储液器,同时,用基站上备有的另一个储液器交换uav上的第二储液器。
15.在示例中,处理单元被配置为确定给无人机的与基站对接并且清洗、维修和/或交换至少一个液体施用单元或其部分的指令,其中确定包括至少一个液体施用单元的操作性的感测信息的利用。
16.因此,传感器感测装载在uav内或附接到uav的液体施用单元的功能/操作性,并且将该信息(例如不时地或连续地)提交给处理单元,该处理单元关于uav到下一个基站的距离分析功能/操作,其中可以清洗、维修和/或交换施用单元或其装载在uav内或附接到uav的部分。如果确定装载在uav内或附接到uav的液体施用单元需要服务,则处理单元指示uav与基站对接。例如,液体施用单元可以包括喷枪、喷杆喷雾器、喷雾杆、涡流盘或喷雾喷嘴等。
17.当uav确实包括至少两个储液器(每个储液器都有相应的液体施用单元)时,有可能一个液体施用单元在基站不需要——分别需要与另一个液体施用单元不同的服务。例如,一个液体施用单元在基站被清洗,而另一个液体施用单元被维修或交换。
18.在示例中,处理单元被配置为确定给无人机的与基站对接并且修复至少一个操作单元的指令,其中确定包括至少一个操作单元的操作性的感测信息的利用。
19.在示例中,至少一个操作单元包括以下一项或多项:动力单元、飞行控制单元、螺旋桨发动机单元、螺旋桨叶片单元和框架。
20.以这种方式,至少一个传感器感测装载在uav内或附接到uav的操作单元的功能/操作性,并且将该信息(例如不时地或连续地)提交给处理单元,该处理单元关于uav到下一个基站的距离分析功能/操作性,其中可以修复装载在uav内或附接到uav的操作单元。如果确定装载在uav内或附接到uav的操作单元需要服务,则处理单元指示uav与基站对接。术语“修复/被修复”是指需要服务的操作单元被清洗、重新附接、再充电、再填充、维修、更换和/或交换。
21.根据第二方面,提供了一种用于一个或多个无人机的基站,其包括至少一个服务单元,其中所述无人机包括
22.‑
至少一个储液器。该至少一个储液器被配置为保存包含活性成分的液体;以及
23.‑
至少一个液体施用单元。该至少一个液体施用单元与至少一个储液器流体连通;以及
24.‑
至少一个操作单元;该至少一个操作单元被配置为使一个或多个无人机能够飞行,以及
25.‑
至少一个传感器单元。该至少一个传感器单元被配置为确定感测信息,其包括感测以下一项或多项的功能:至少一个储液器、至少一个液体施用单元、至少一个操作单元;以及其中处理单元被配置为确定给基站的使一个或多个无人机能够与基站对接的指令,以及其中处理单元还被配置为确定给基站的至少一个服务单元的向一个或多个无人机提供服务的指令,其中处理单元的确定包括一个或多个无人机的至少一个传感器的感测信息的利用。
26.换言之,基站接收来自uav的传感器信息——已经通过处理单元处理,或从uav接收到的传感器信息在基站用作为基站的部分的处理单元来处理。处理单元进行确定——这是(至少部分地)基于从传感器信息接收到的信息,并且如果uav需要对接到基站并且获得服务,则指示uav、基站和/或服务单元。
27.在示例中,处理单元被配置为确定给基站的使一个或多个无人机能够与基站对接的指令,并且处理单元还被配置为确定给至少一个服务单元的用包含活性成分的液体再填充一个或多个无人机的至少一个储液器和/或将一个或多个无人机的至少一个储液器与被
包含活性成分的液体至少部分地填充的储液器交换的指令,其中一个或多个无人机包括至少一个传感器单元,被配置为感测至少一个储液器内的液位,以及其中处理单元的确定包括一个或多个无人机的至少一个传感器单元的感测信息的利用。
28.在另一个示例中,处理单元被配置为确定给基站的使一个或多个无人机能够与基站对接的指令,并且处理单元还被配置为确定给至少一个服务单元的清洗、维修和/或交换至少一个液体施用单元或其部分的指令,其中所述一个或多个无人机包括至少一个传感器单元,其被配置为感测至少一个液体施用单元的操作性,以及其中处理单元的确定包括一个或多个无人机的至少一个传感器单元的感测信息的利用。
29.在示例中,处理单元被配置为确定给基站的使一个或多个无人机能够与基站对接的指令,并且处理单元还被配置为确定给至少一个服务单元的修复至少一个操作单元的指令,其中所述一个或多个无人机包括至少一个传感器单元,其被配置为感测至少一个操作单元的操作性,以及其中处理单元的确定包括一个或多个无人机的至少一个传感器单元的感测信息的利用。
30.在另一个示例中,基站包括至少一个传感器单元,被配置为感测以下一项或多项:基站上备有的用于旨在对接到基站的一个或多个无人机的剩余机场容量、一个或多个储液器的库存、有一种或多种活性成分的一种或多种液体、一个或多个液体施用单元、一个或多个操作单元,以及其中处理单元的确定包括一个或多个无人机的至少一个传感器单元和基站的至少一个传感器单元的感测信息的利用。
31.因此,基站的至少一个传感器单元的传感器信息被转发到处理单元,并且处理单元被配置为确定给一个或多个uav、基站和/或一个或多个服务单元的指令,其中确定包括感测信息的利用。换言之,如果例如基站在uav登录之前被通知了uav的功能状态并且基站没有资源来为uav服务和/或没有任何空间可用于uav对接到基站,则用基站的至少一个传感器单元感测该信息并且通过处理单元使用该信息以将uav转向确实具有资源为uav服务的另一个基站,或例如,如果基站上暂时没有机场容量,但是用于向uav提供所需服务的资源在该基站上可用——以延迟uav对接基站,直到自由空间在基站上可用。
32.根据第三方面,提供了一种用于将活性成分施用到农作物上的系统,其包括:
33.‑
根据第一方面和相关联的示例中的任何一个示例的至少一个无人机;
34.‑
根据第二方面和相关联的示例中的任何一个示例的至少一个基站;
35.‑
处理单元。
36.对于所述至少一个无人机的无人机,至少一个传感器单元被配置为确定感测信息,其包括感测以下一项或多项的功能:至少一个储液器、至少一个液体施用单元、至少一个操作单元,并且将感测信息转送给处理单元,
37.处理单元被配置为确定给无人机的与至少一个基站对接的指令。处理单元还被配置为确定给至少一个基站的使无人机能够与至少一个基站对接的指令。处理单元还被配置为确定给至少一个基站的至少一个服务单元的向无人机提供服务的指令。处理单元的所有确定都包括至少一个无人机的至少一个传感器单元的感测信息的利用。
38.根据第四方面,提供了一种用至少一个无人机和至少一个基站将活性成分施用到农作物上的方法,其包括:
39.a)将包含活性成分的液体保存在至少一个储液器中,该储液器装载在无人机内或
附接到无人机,其中至少一个液体施用单元装载在无人机内或附接到无人机,并且至少一个液体施用单元与至少一个储液器流体连通;
40.b)将至少一个操作单元装载在无人机内或附接到无人机,该操作单元被配置为使至少一个无人机能够飞行;
41.c)将至少一个传感器单元装载在至少一个无人机内或附接到至少一个无人机,该传感器单元被配置为确定感测信息,其包括感测以下一项或多项的功能:至少一个储液器、至少一个液体施用单元、至少一个操作单元;
42.d)用至少一个无人机的至少一个传感器单元感测以下一项或多项的功能:至少一个储液器、至少一个液体施用单元、至少一个操作单元,以提供感测信息并且将其转送给处理单元;
43.e)如果处理单元如此指示,则将至少一个无人机对接到至少一个基站,其中指令的确定包括感测信息的利用;以及
44.f)如果处理单元如此指示,则用至少一个基站的至少一个服务单元为至少一个无人机服务,其中指令的确定包括感测信息的利用。
45.根据第五方面,提供了一种通过无人机将活性成分施用到农作物上的方法,其包括:
46.a)将包含活性成分的液体保存在至少一个储液器中,该储液器装载在无人机内或附接到无人机,其中至少一个液体施用单元装载在无人机内或附接到无人机,并且至少一个液体施用单元与至少一个储液器流体连通;
47.b)将至少一个操作单元装载在无人机内或附接到无人机,该操作单元被配置为使无人机能够飞行;
48.c)将至少一个传感器单元装载在无人机内或附接到无人机,该传感器单元被配置为确定感测信息,其包括感测以下一项或多项的功能:至少一个储液器、至少一个液体施用单元、至少一个操作单元;
49.d)用至少一个传感器单元感测以下一项或多项的功能:至少一个储液器、至少一个液体施用单元、至少一个操作单元,以提供感测信息并且将其转送给处理单元;以及
50.e)通过处理单元确定给无人机的与基站对接并且从基站获得服务的指令,其中确定步骤包括感测信息的利用。
51.根据第六方面,提供了一种用基站为无人机服务的方法,其包括:
52.a)将至少一个服务单元装载在基站中或附接到基站;
53.b)将包含活性成分的液体保存在至少一个储液器中,该储液器装载在无人机内或附接到无人机,其中至少一个液体施用单元装载在无人机内或附接到无人机,并且至少一个液体施用单元与至少一个储液器流体连通;
54.c)将至少一个操作单元装载在无人机内或附接到无人机,该操作单元被配置为使无人机能够飞行;
55.d)将至少一个传感器单元装载在无人机内或附接到无人机,该传感器单元被配置为确定感测信息,其包括感测以下一项或多项的功能:至少一个储液器、至少一个液体施用单元、至少一个操作单元;
56.e)用至少一个传感器单元感测以下一项或多项的功能:至少一个储液器、至少一
个液体施用单元、至少一个操作单元,以提供感测信息并且将其转送给处理单元;
57.f)通过处理单元确定给基站的使无人机能够与基站对接的指令,其中确定步骤包括感测信息的利用;以及
58.g)确定给位于基站内或附接到基站的至少一个服务单元的通过处理单元向无人机提供服务的指令,其中确定步骤包括感测信息的利用。
59.有利地,上述任何方面所提供的好处同样适用于所有其他方面,反之亦然。
60.上述方面和示例通过下面描述的实施例将变得显而易见,并且参考下面描述的实施例进行说明。
附图说明
61.示例性实施方案将参考以下图在下面进行描述:
62.图1示出了用于将活性成分施用到农作物上的无人机的示例的示意性设置;
63.图2示出了用于将活性成分施用到农作物上的无人机系统的基站的示例的示意性设置;
64.图3示出了用于通过无人机将活性成分施用到农作物上的示意性设置;
65.图4a示出了用至少一个无人机和至少一个基站将活性成分施用到农作物上的方法;以及
66.图4b示出了通过无人机将活性成分施用到农作物上的方法;以及
67.图4c示出了用基站为无人机服务的方法;
68.图5a示出了图1的无人机的详细示例;
69.以及图5b示出了图2的基站和图1的无人机的详细示例;
70.图6示出了用于将活性成分施用到图3的农作物上的示意性设置的详细示例并且包括多个无人机和基站。
具体实施方式
71.图1示出了用于将活性成分施用到农作物上的无人机10的示例。无人机(uav)10包括储液器20。至少一个储液器20被配置为保存包含活性成分的液体。uav 10还包括至少一个液体施用单元30。至少一个液体施用单元30与储液器20流体连通。uav 10还包括至少一个操作单元40和至少一个传感器单元50。至少一个操作单元40被配置为使无人机能够飞行。至少一个传感器单元50被配置为确定感测信息,其包括感测以下一项或多项的功能:至少一个储液器20、至少一个液体施用单元30、至少一个操作单元40。处理单元60(其可以在uav内或附接到uav或在uav外部)被配置为确定给无人机的与基站70对接并且从基站获得服务的指令,其中确定包括感测信息的利用。
72.在示例中,处理单元被配置为确定一个或多个服务是否由基站提供。为了提高效率,最好在同一基站进行同时服务。作为例证,如果在基站再填充储液器,则动力单元(作为操作单元的部分)同时也进行再充电/再填充。
73.在示例中,至少一个传感器单元被配置为确定感测信息,包括感测以下项的功能:至少一个储液器、至少一个液体施用单元和至少一个操作单元。
74.根据示例,处理单元被配置为确定给无人机的与基站对接并且用包含活性成分的
液体再填充至少一个储液器和/或将至少一个储液器与被包含活性成分的液体至少部分地填充的(通常是满的)储液器交换的指令,其中确定包括至少一个储液器内液位的感测信息的利用。
75.在示例中,术语“至少部分地填充的”是指确实包括包含活性成分的至少一些液体的储液器。通常,储液器是至少半满的、至少四分之三满的或满的。
76.在示例中,在用包含活性成分的液体进行再填充之前,清洗要用包含活性成分的液体再填充的至少一个储液器。
77.作为示例,当储液器中的液体的2/3已经用完时,uav正转向基站,并且从uav的当前位置到下一个基站的(到目前为止未被喷洒的)路径上的喷洒量需要储液器中的液体的剩余1/3。
78.在示例中,被配置为感测液体点位的液位传感器包括磁性和机械浮子、压力传感器、导电感测或静电(电容或电感)检测器和通过测量信号到流体表面的飞行时间、通过电磁(诸如磁致伸缩)、超声波、雷达或光学传感器等。
79.在示例中,被配置为感测连续液位的液位传感器包括磁致伸缩液位传感器、电阻链液位传感器、磁阻浮子液位传感器、静水压力液位传感器、空气起泡器等。
80.根据示例,处理单元被配置为确定给无人机的与基站对接并且清洗、维修和/或交换至少一个液体施用单元或其部分的指令,其中确定包括至少一个液体施用单元的操作性的感测信息的利用。
81.在示例中,至少一个液体施用单元或其部分的交换是指uav的至少一个液体施用单元或其部分与可操作的液体施用单元或其部分的交换。
82.在示例中,液体施用单元包括喷枪、喷杆喷雾器、喷雾杆、喷雾喷射器、涡流盘和喷雾喷嘴等,被配置为喷洒液体,这可选地包括作为喷洒过程的部分的该液体的雾化。
83.在示例中,液体施用单元包括施用设备,被配置为在液体的施用期间接触植被。这种施用设备的示例是漆刷型设备,该设备将液体分配到刷子,该液体以刷的方式施用到树叶上。
84.如果喷枪、喷杆喷雾器、喷雾杆、喷雾喷射器和/或喷雾喷嘴被有活性成分的液体中的成分堵塞或部分堵塞(例如如果某些成分发生了不需要的结晶),则可能影响功能/操作性。
85.在示例中,至少一个传感器单元被配置为确定感测信息,其包括感测至少一个液体施用单元的堵塞,并且处理单元被配置为确定给无人机的与基站对接并且清洗、维修和/或交换至少一个液体施用单元或其部分的指令,其中确定包括至少一个液体施用单元的堵塞的感测信息的利用。
86.在示例中,用于至少一个液体施用单元的传感器通过测量要通过至少一个液体施用单元向植物喷洒的液体的压力变化来感测堵塞。
87.在另一个示例中,用于至少一个液体施用单元的传感器通过测量至少一个液体施用单元的喷洒模式的(例如视觉)变化(例如用摄像头)来感测堵塞。
88.在示例中,术语“堵塞”是指至少一个液体施用单元中液体的流速的下降,特别是至少一个液体施用单元的管道;和/或喷枪、喷杆喷雾器、喷雾杆、喷雾喷射器和/或喷雾喷嘴中液体的流速的下降。
89.根据示例,处理单元被配置为确定给无人机的与基站对接并且修复至少一个操作单元的指令,其中确定包括至少一个操作单元的操作性的感测信息的利用。
90.根据示例,至少一个操作单元包括以下一项或多项:动力单元80、飞行控制单元90、螺旋桨发动机单元100、螺旋桨叶片单元110和框架115。
91.在示例中,动力单元被配置为包括蓄电池、电池(诸如锂聚合物电池)、燃料箱、汽油箱、混合燃料电池等。
92.在另一个示例中,飞行控制单元被配置为包括计算机和软件,用于管理与uav的飞行相关的功能,其中飞行控制单元还被配置为接收来自处理单元的指令。
93.在另一个示例中,螺旋桨发动机单元被配置为包括一个或多个发动机,用于扭动一个或多个叶片。作为示例,四轴飞行器(也称为四旋翼直升机或四旋翼飞行器)是多旋翼直升机,由四个发动机提升和推进。
94.在另一个示例中,螺旋桨叶片单元被配置为包括一个或多个螺旋桨叶片。螺旋桨叶片是uav经常损坏和更换的部件。
95.在另一个示例中,框架被配置为装载uav的操作单元的组件。
96.在另一个示例中,框架被配置为装载uav的所有组件。
97.在示例中,动力单元被配置为包括蓄电池/电池,并且蓄电池/电池的操作性是用库伦计数器或阻抗跟踪器来感测的。
98.在示例中,动力单元被配置为包括燃料/汽油箱,并且燃料/汽油箱的操作性是例如用磁阻式油位传感器来感测的。
99.在另一个示例中,飞行控制单元被配置为包括传感器,用于感测惯性测量单元(imu)的操作性的缺陷。imu使用一个或多个加速度计检测uav的当前加速度。imu检测使用一个或多个陀螺仪检测旋转属性(如俯仰、滚转和偏航)的变化。一些imu包括磁力计,用于协助校准方位漂移。
100.在另一个示例中,螺旋桨发动机单元被配置为包括传感器,用于感测螺旋桨发动机单元的操作性。螺旋桨发动机单元的操作性也可以可替代地被飞行控制单元的传感器感测。
101.在另一个示例中,螺旋桨叶片单元被配置为包括传感器,用于感测螺旋桨叶片的操作性。此传感器可以是光学传感器,例如叶片附近的摄像头,例如安装在uav转子臂上的卡箍下,该传感器感测例如螺旋桨叶片形状的规则性和/或螺旋桨叶片的运动的一致性。
102.在示例中,操作单元的修复涉及动力单元的再填充/再充电。
103.在另一个示例中,操作单元的修复涉及新软件的更新或飞行控制单元的现有操作软件的更新。
104.在另一个示例中,操作单元的修复涉及向螺旋桨发动机单元提供维护服务,诸如例如清洗螺旋桨发动机单元,或根据所使用的发动机的类型,将润滑油施用到螺旋桨发动机单元等上。
105.在另一个示例中,螺旋桨叶片单元的修复涉及向螺旋桨叶片单元提供的维护服务,诸如例如清洗螺旋桨叶片或如果叶片被部分拆卸,则重新附接叶片。
106.在示例中,操作单元的更换可以涉及移除空的可移除蓄电池并且引入充满电的蓄电池。
107.在另一个示例中,操作单元的更换可以涉及移除(例如损坏或旧的)飞行控制单元,诸如带有用于控制uav的飞行的软件的计算机芯片,并且引入操作飞行控制单元,诸如带有软件的计算机芯片。
108.在另一个示例中,操作单元的更换可以涉及移除(例如损坏或旧的)螺旋桨发动机单元,并且引入全面运转的螺旋桨发动机。
109.在另一个示例中,操作单元的更换可以涉及移除(例如损坏或拆卸的)螺旋桨叶片或螺旋桨叶片单元,并且引入全面运转的螺旋桨叶片或螺旋桨叶片单元。
110.在另一个示例中,根据本发明的无人机包括带有至少一个动力单元的至少一个操作单元,其中处理单元被配置为确定给无人机的与基站对接并且再充电/再填充至少一个动力单元的指令,其中确定包括至少一个动力单元的能量状态的感测信息的利用。
111.在另一个示例中,至少一个液体施用单元被配置为接收来自处理单元的至少一个输入。该至少一个输入可用于激活至少一个液体施用单元。
112.在另一个示例中,根据本发明的无人机包括处理单元60。
113.在另一个示例中,处理单元被配置为对至少一个传感器单元的感测信息执行分析。
114.在另一个示例中,至少一个传感器单元的功能也用附加传感器感测单元来感测。
115.根据示例,处理单元被配置为确定无人机的与基站对接并且将至少一个传感器单元或其部分与可操作的传感器单元或其部分交换的指令,其中确定包括带有附加传感器感测单元的至少一个传感器单元的操作性的感测信息的利用。
116.另一个示例涉及根据本发明的无人机,其中至少一个液体施用单元被配置为在通过处理单元基于摄像头所获取到的环境的至少一个图像的图像分析而确定的位置被激活。
117.另一个示例涉及根据本发明的无人机,其中处理单元被配置为对至少一个图像执行分析,以确定激活至少一个液体施用单元的位置。
118.在另一个示例中,根据本发明的无人机包括处理单元,不仅进行图像分析,而且对感测信息进行分析。
119.在另一个示例中,根据本发明的无人机包括处理单元,其中处理单元被配置为对至少一个传感器单元的感测信息执行分析和对至少一个图像执行分析,来确定激活至少一个液体施用单元的位置。
120.另一个示例涉及根据本发明的无人机,其中无人机包括摄像头120,其中摄像头被配置为获取至少一个图像。
121.环境的影像可以由uav获取,或确切地说,由先前可能已经获取到影像的不同平台获取。影像被传输给处理单元,该处理单元可能再次在uav中或在uav外部。处理单元分析影像以确定激活uav所携带的液体施用单元的位置。以这种方式,在计算机中(例如在农民的办公室或基站中)进行离线处理,获取到的田地的影像可以用于实际上确定在该田地中uav(诸如无人驾驶飞机)应当施用液体中的具体活性成分的位置的地图。以这种方式,在示例中,无人驾驶飞机可以有处理单元并且设置有通过不同的平台获取到的影像。无人驾驶飞机然后分析影像,以确定激活其液体施用单元的位置。因此,无人驾驶飞机可以正在飞行并且确定激活其液体施用单元的位置,飞到适当的位置,然后在该位置施用液体。
122.然而,另一个示例涉及根据本发明的无人机,其中对至少一个图像进行分析以确
定激活至少一个液体施用单元的至少一个位置包括确定至少一种类型的杂草和/或包括确定至少一种类型的疾病和/或包括确定至少一种类型的害虫和/或包括确定至少一种类型的昆虫和/或确定至少一种类型的营养不良。
123.换言之,液体施用单元可以被激活,并且液体施用的方式可以考虑在某个位置存在要控制的杂草以及其中可以考虑要控制的杂草的类型和/或考虑在某个位置存在要控制的疾病以及其中可以考虑要控制的疾病的类型和/或考虑在某个位置存在的要控制的害虫以及其中可以考虑要控制的害虫的类型和/或考虑在某个位置存在要控制的昆虫以及其中可以考虑要控制的昆虫的类型和/或考虑在某个位置存在要缓解的营养不良以及其中可以考虑要缓解的营养不良的类型。因此,无人机(诸如无人驾驶飞机)可以围绕环境(诸如田地)飞行,并且基于获取到的田地的图像的图像处理,确定存在杂草、杂草的类型和杂草所在的地方,并且含有控制该杂草和/或杂草的类型所需的活性成分的液体可以在杂草的位置施用。无人驾驶飞机可以有若干不同的储液器,包含具有不同活性成分的不同液体,并且基于识别到的杂草,可以将适当的液体施用到杂草上。同样,可以有若干不同的无人驾驶飞机正在围绕田地飞行,每架无人驾驶飞机在其储液器中都有包含不同活性成分的不同液体,并且不同的无人驾驶飞机可以将其携带的液体施用到需要的地方。例如,在具体示例中,当无人驾驶飞机有摄像头时,如果该无人驾驶飞机使需要施用它携带的液体的杂草成像,则它可以立即将该液体施用到该杂草上。然而,如果确定杂草应当由不同的液体控制,则可以将该信息以及杂草的位置和要在该位置所施用的液体的类型传达给不同的无人驾驶飞机,其中可以从第一无人驾驶飞机或通过第一无人驾驶飞机外部的处理单元将该信息传达给携带有正确液体的第二无人驾驶飞机。该第二无人驾驶飞机然后飞到杂草并且将正确的液体施用到杂草上。一架或多架无人机以与控制疾病、害虫、昆虫和缓解营养不良相同的方式操作。以这种方式,在每个位置使用正确的化学品,提高了施用的有效性,并且有相关联的环境优势,因为化学品只在必要的地方使用。
124.在示例中,对至少一个图像的分析包括机器学习算法的利用。
125.在示例中,机器学习算法包括决策树算法。
126.在示例中,机器学习算法包括人工神经网络。
127.在示例中,机器学习算法已经基于多个图像进行了教导。在示例中,机器学习算法已经基于包含至少一种类型的杂草和/或遭受一种或多种疾病的至少一种类型的植物和/或遭受一种或多种类型的昆虫的昆虫侵袭的至少一种类型的植物和/或至少一种类型的昆虫(当影像有足够的分辨率时)和/或遭受一种或多种害虫的至少一种类型的植物和/或遭受一种类型或多种类型的营养不良的至少一种类型的植物的影像的多个图像进行了教导。
128.在示例中,机器学习算法已经基于包含这种影像的多个图像进行了教导。
129.因此,uav 10可以有一个摄像头120和处理单元60,该处理单元60使用摄像头所获取到的影像来激活液体施用单元30。摄像头120获取田地的环境的影像。该影像不需要由无人驾驶飞机10获取,但是可以由不同的无人驾驶飞机获取,然后被传递给无人驾驶飞机10进行处理。可替代地,它可以由基站70获取,然后被传递给无人驾驶飞机10进行处理。摄像头120所获取的影像的分辨率使植被能够被识别为植被,并且确切地说,其分辨率可以使一种类型的杂草能够与另一种类型的杂草区分开来。影像的分辨率可以使被害虫或昆虫侵扰的农作物能够从农作物本身的影像或从例如昆虫本身的获取确定。无人驾驶飞机10可以有
全球定位系统(gps)152,并且这使获取到的影像的位置能够被确定。例如,当获取到影像时,摄像头120的方位和无人驾驶飞机10的位置可以用于确定图像在地平面的地理足迹。无人驾驶飞机10还可以有惯性导航系统154,例如基于激光陀螺仪。除了用于确定无人驾驶飞机10的方位,因此确定摄像头120的方位,从而促进确定已经在地面上的什么地方获取到影响之外,惯性导航系统154还可以在没有gps 152的情况下单独运行,以通过确定远离已知位置或若干已知位置(诸如基站)的运动,来确定无人驾驶飞机的位置。在示例中,惯性导航系统可以是上述飞行控制单元的imu的部分。摄像头120将获取到的影像传递给处理单元60。图像分析软件在处理单元60上运行。图像分析软件可以使用特征提取,诸如边缘检测以及对象检测分析,该对象检测分析例如可以识别田地中和周围的结构(诸如建筑物、道路、围栏、树篱等)。因此,基于这些对象的已知位置,处理单元可以对获取到的影像进行修补,从而实际上创建环境的合成表示,该合成表示实际上可以覆盖环境的地理地图。因此,每个图像的地理位置都可以被确定,并且不需要相关联的gps和/或与获取到的影像相关联的基于惯性导航的信息。换言之,基于图像的定位系统156可以用于定位无人驾驶飞机10。然而,如果有gps和/或惯性导航信息可用,则不需要这种图像分析,该图像分析可以仅基于影像将具体图像放置在具体地理位置。不过,如果gps和/或基于惯性导航的信息是可用的,则这种图像分析可以用于增大与图像相关联的地理位置。处理单元60运行附加图像处理软件。这种软件分析图像来确定图像中发现植被的区域,并且也分析影像来确定没有发现植被的地方(例如在穿过田地的小路、在田地的边界周围,甚至在穿过田地的拖拉机车辙上)。后者的这种信息可以用于确定不需要施用液体的地方。基于获取到的图像中的特征的形状可以检测到植被,其中例如边缘检测软件用于描绘对象的外周长和对象本身的外周长内的特征的外周长;当无人机用于沿铁路轨道环境的杂草控制时,可以用相似的方式检测压载物之间的有机材料。植被影像的数据库可以用于帮助确定影像中的特征是否与植被相关,例如使用训练过的机器学习算法,诸如人工神经网络或决策树分析。摄像头可以获取多光谱影像,其中影像具有与图像中的颜色相关的信息,并且这可以单独使用,也可以与特征检测结合使用,以确定要发现图像植被的地方。如上所述,因为图像的地理位置可以从地面上的图像的大小的知识确定,所以植被的一个或多个位置和/或要施用液体的其他区域可以在图像中发现,然后可以被映射到该植被(区域)在地面上的确切位置。处理单元60然后运行附加图像处理软件,该软件可以是图像处理的部分,如果使用了特征提取,则该图像处理基于该特征提取确定植被位置。该软件包括机器学习分析器。获取具体杂草的图像,其中信息也与所使用的杂草的大小相关。与世界上发现这种杂草的地理位置相关的信息和与一年中发现这种杂草的时间(包括何时开花等)相关的信息可以用影像来标记。杂草的名字也可以用杂草的影像来标记。机器学习分析器(其可以是基于人工神经网络或决策树分析器)然后在这种获取到的地面实况影像中进行训练。以这种方式,当新的植被图像呈现给分析器时,其中这种图像可以有标记到其上的相关联的时间戳(诸如一年的时间)和地理位置(诸如德国或南非),分析器通过将在新的图像中发现的杂草的影像与它已经训练过的不同杂草的影像进行比较来确定图像中杂草的具体类型,其中还可以考虑杂草的大小以及它们生长的地方和时间。因此,可以确定该杂草类型在环境中的地面上的具体位置以及其大小。处理单元60有权访问包含不同杂草类型的数据库,并且将最佳液体施用到该杂草上。该数据库已经从实验确定的数据汇编而成。使用机器学习算法的图像处理软件也已经进行了教导,以识
别昆虫、被昆虫侵扰的植物、遭受害虫的植物和遭受营养不良的植物。这是用与上述方式相同的方式来完成的,即通过基于先前获取到的影像进行训练。数据库还包含在什么情况下应当施用什么液体。
130.然而,在另一个示例中,无人机包括至少一个液体施用单元,其可相对于无人机移动,其中无人机的处理器被配置为移动至少液体施用单元。以这种方式,如果需要,则uav可以以非常有针对性的方式施用液体。
131.另一个示例涉及无人机,其中至少一个液体施用单元被安装在至少一个伸缩臂130上。
132.在本发明的示例中,无人机包括摄像头,该摄像头被配置为相对于无人机移动,其中无人机的处理器被配置为移动摄像头。在示例中,摄像头被安装在伸缩臂140上。
133.以这种方式,当uav在周围飞行时,摄像头可以移动以使环境的不同部分成像,而无需改变uav的方位,如果摄像头处于固定位置,就需要这样做。
134.在示例中,其上安装有摄像头的伸缩臂与其上安装有液体施用单元的伸缩臂相同。
135.在示例中,无人机的被配置为移动摄像头的处理器是被配置为分析环境的图像和感测信息的处理单元。
136.另一个示例涉及无人机,其中无人机包括位置确定部件150。在另一个示例中,位置确定部件150包括以下一项或多项:gps 152、惯性导航系统154或基于图像的定位系统156。
137.在示例中,位置确定部件被配置为在获取到至少一个图像时,向处理单元提供与摄像头相关联的至少一个位置。位置可以是相对于地面上的精确位置的地理位置,也可以是地面上的位置,参照地面上的另一个位置或多个位置,诸如田地的边界或基站的位置。换言之,可以利用绝对地理位置,也可以使用地面上不需要以绝对方式知道但是参照已知位置的位置。因此,通过将图像与获取到该图像的位置相关,可以将激活液体施用单元准确地激活到该位置。因此,即使例如无人驾驶飞机已经将液体用完并且正在飞回基站以装满液体,它也可以继续获取要用于在具体位置激活液体施用单元的影像,即使该位置不能被立即解决,但是在无人驾驶飞机已经再充电后,就会施用液体。同样,当无人驾驶飞机确定位置应当有它没有携带的所施用的液体时,该信息可以被记录并且在该无人驾驶飞机携带所需液体后被使用或被传输给携带该液体的另一架无人机,并且其他无人驾驶飞机可以飞到该位置并且在该位置施用其液体。可替代地,它可以通过处理单元将该信息传输给基站,这会激活基站上的uav,以装满所需的液体飞到该位置,并且在该位置施用它们的液体。有可能通过处理单元,指示更接近基站的uav对接到基站,以获得所需的液体,并且更经济且更有效地将它们施用到识别到的位置。
138.在示例中,位置是绝对地理位置。
139.在示例中,位置是参照一个或多个已知位置确定的位置。换言之,在不知道图像的精确地理位置的情况下,可以确定该图像与地面上的具体位置相关联,但是通过关于地面上的一个或多个已知位置知道获取到图像的位置,随后,通过将液体施用单元移动到该位置或使另一架无人机能够移动到该位置以在该位置激活其液体施用单元,可以激活液体施用单元。
140.在示例中,gps单元152用于确定位置(诸如获取到具体图像时摄像头的位置)和/或在确定该位置时被使用。
141.在示例中,惯性导航单元154单独使用或与gps单元结合使用,以确定位置,诸如获取到具体图像时摄像头的位置。因此,例如,包括例如一个或多个激光陀螺仪的惯性导航单元在已知位置(诸如基站)进行校准或调零,并且当它与至少一个摄像头一起移动时,可以确定远离x、y和z坐标中的该已知位置的运动,从中可以确定获取到图像时至少一个摄像头的位置。
142.在示例中,获取到的影像156单独使用或与gps单元结合使用或与gps单元和惯性导航单元结合使用,以确定位置,诸如获取到具体图像时摄像头的位置。换言之,当机器移动时,它可以获取用于渲染环境的合成表示的影像,并且从具体的标记,诸如树的位置、田地边界、道路等,机器可以从它获取到的影像中确定其在该合成环境中的位置。
143.在示例中,uav的不同组件之间的数据通信可以使用有线或无线链路(包括地面或卫星链路)通过网络(诸如局域网、广域网、互联网或因特网)发生。
144.图2示出了用于一个或多个无人机10的基站70的示例,其包括至少一个服务单元160。无人机包括至少一个储液器20、至少一个液体施用单元30、至少一个操作单元40和至少一个传感器单元50。至少一个储液器被配置为保存包含活性成分的液体。至少一个液体施用单元还与至少一个储液器流体连通。另外,至少一个操作单元被配置为使一个或多个无人机能够飞行。至少一个传感器单元被配置为确定感测信息,其包括感测以下一项或多项的功能:至少一个储液器、至少一个液体施用单元、至少一个操作单元。可以在基站中或在基站外部的处理单元60被配置为确定给基站的使一个或多个无人机能够与基站对接的指令。处理单元还被配置为确定给基站的至少一个服务单元的向一个或多个无人机提供服务的指令。处理单元的确定包括一个或多个无人机的至少一个传感器单元的感测信息的利用。
145.在示例中,至少一个传感器单元被配置为确定感测信息,其包括感测以下项的功能:至少一个储液器、至少一个液体施用单元和至少一个操作单元。
146.在示例中,基站还可以携带小型感测uav,其配备有传感器,诸如多光谱摄像头,该uav可以飞过目标田地并且识别哪些产品最适合施用。小型感测uav也可以绘制目标田地的地图,以允许精确施用到需要产品施用的区域并且也识别不需要施用的区域。基站可以通过处理单元用来自小型感测uav的数据对uav的飞行路径进行编程。可替代地,数据可以被传输给基站外部的处理单元,其中数据可以被分析并且飞行路径被传递回到uav。
147.在另一个示例中,小型感测uav还可以提供关于植物的水分水平的信息,特别是从清晨和雨后的露水,这可以包括在飞行路径的设计中。该数据还可以用于为uav选择适当的液体施用单元,诸如喷嘴。
148.在示例中,uav的至少一个操作单元40包括以下一项或多项:动力单元80、飞行控制单元90、螺旋桨发动机单元100、螺旋桨叶片单元110和框架115。
149.在另一个示例中,至少一个服务单元包括一个或多个储液器、有一种或多种活性成分的一种或多种液体、一个或多个液体施用单元(诸如例如各种喷嘴)、操作单元的备件、操作单元的动力单元的一个或多个再充电/再填充小部件等。
150.在另一个示例中,至少一个服务单元包括机械臂170。
151.在另一个示例中,至少一个服务单元包括具有机械抓钳180的机械臂。
152.在另一个示例中,至少一个服务单元被配置为自主移动。
153.在另一个示例中,至少一个服务单元确实有轮子。
154.在另一个示例中,处理单元被配置为确定给基站的自主移动到另一个位置的指令,其中确定包括来自至少一个uav的感测信息的利用。
155.根据示例,处理单元被配置为确定给基站的使一个或多个无人机能够与基站对接的指令,以及其中处理单元还被配置为确定给至至少一个服务单元的用包含活性成分的液体再填充一个或多个无人机的至少一个储液器和/或将一个或多个无人机的至少一个储液器与被包含活性成分的液体至少部分地填充的(通常是满的)储液器交换的指令,其中一个或多个无人机包括至少一个传感器单元,其被配置为感测至少一个储液器内的液位,以及其中处理单元的确定包括一个或多个无人机的至少一个传感器单元的感测信息的利用。
156.根据示例,处理单元被配置为确定给基站的使一个或多个无人机能够与基站对接的指令,以及其中处理单元还被配置为确定给至少一个服务单元的清洗一个或多个无人机的至少一个储液器,然后用包含活性成分的液体再填充至少一个储液器的指令,其中一个或多个无人机包括至少一个传感器单元,其被配置为感测至少一个储液器内的液位,以及其中处理单元的确定包括一个或多个无人机的至少一个传感器单元的感测信息的利用。
157.根据示例,处理单元被配置为确定给基站的使一个或多个无人机能够与基站对接的指令,以及其中处理单元还被配置为确定给至少一个服务单元的清洗、维修和/或交换至少一个液体施用单元或其部分的指令,其中一个或多个无人机包括至少一个传感器单元,被配置为感测至少一个液体施用单元的操作性,以及其中处理单元的确定包括一个或多个无人机的至少一个传感器单元的感测信息的利用。
158.根据示例,处理单元被配置为确定给基站的使一个或多个无人机能够与基站对接的指令,以及其中处理单元还被配置为确定给至少一个服务单元的清洗、维修和/或交换至少一个液体施用单元或其部分的指令,其中一个或多个无人机包括至少一个传感器单元,被配置为感测至少一个液体施用单元的堵塞,以及其中处理单元的确定包括一个或多个无人机的至少一个传感器单元的感测信息的利用。
159.在示例中,至少一个液体施用单元或其部分的交换涉及至少一个液体施用单元或其部分与可操作的液体施用单元或其部分的交换。
160.根据示例,处理单元被配置为确定给基站的使一个或多个无人机能够与基站对接的指令,以及其中处理单元还被配置为确定给至少一个服务单元的修复至少一个操作单元的指令,其中一个或多个无人机包括至少一个传感器单元,其被配置为感测至少一个操作单元的操作性,以及其中处理单元的确定包括一个或多个无人机的至少一个传感器单元的感测信息的利用。
161.在本发明的示例中,基站包括处理单元,并且处理单元被配置为对从一个或多个无人机的至少一个传感器单元接收到的感测信息执行分析。
162.另一个示例涉及基站,其中处理单元被配置为确定给基站的使一个或多个无人机能够与基站对接的指令,以及其中处理单元还被配置为确定给至少一个服务单元的再充电/再填充一个或多个无人机的至少一个动力单元的指令,其中一个或多个无人机包括至少一个传感器单元,其被配置为感测至少一个动力单元的能量状态,以及其中处理单元的
确定包括一个或多个无人机的至少一个传感器单元的感测信息的利用。
163.根据示例,基站包括至少一个传感器单元190,其被配置为确定感测信息,其包括感测以下一项或多项:基站上备有的用于旨在对接到基站的一个或多个无人机的剩余机场容量、一个或多个储液器的库存、有一种或多种活性成分的一种或多种液体、一个或多个液体施用单元、一个或多个操作单元,以及其中处理单元的确定包括一个或多个无人机的至少一个传感器单元和基站的至少一个传感器单元的感测信息的利用。
164.在另一个示例中,用于感测用于旨在对接到基站的uav的剩余机场容量的传感器可以是例如视觉传感器(诸如摄像头)或触觉传感器。库存水平可以通过读取产品、在售传感器、一个或多个摄像头、rfid传感器等上的智能标签来感测。关于基站的库存信息,有可能通知供应商、农民、运营商等,以确保基站在适当的时候重新进货。
165.在另一个示例中,基站还包括至少一个传感器单元190,其被配置为确定感测信息,其包括感测以下一项或多项:风速、风向、温度、湿度、云运动、降雨量。
166.在另一个示例中,处理单元分析基站的至少一个传感器单元的传感器数据,以确定uav的最佳飞行路径和时间,同时最小化偏离目标损失(诸如漂移),从而最大化施用效率。
167.在另一个示例中,处理单元分析基站的至少一个传感器单元的传感器数据,以确定给基站的自主移动到另一个位置(地点)的指令。
168.在另一个示例中,处理单元分析基站的至少一个传感器单元的传感器数据和至少一个uav的感测信息,以确定给基站的自主移动到另一个位置(地点)的指令。
169.在示例中,基站的不同组件之间的数据通信可以使用有线或无线链路(包括地面或卫星链路)通过网络(诸如局域网、广域网、互联网或因特网)发生。
170.图3示出了用于将活性成分施用到农作物上的系统200,其包括关于图1描述的至少一个无人机10和任何相关联的示例、关于图2描述的至少一个基站70和任何相关联的示例以及处理单元60。至少一个无人机的至少一个传感器单元50被配置为确定感测信息,其包括感测以下一项或多项的功能:至少一个储液器20、至少一个液体施用单元30、至少一个操作单元40,并且将感测信息转送给处理单元。处理单元被配置为确定给至少一个无人机的与至少一个基站对接的指令。处理单元还被配置为确定给至少一个基站的使至少一个无人机能够与基站对接的指令。处理单元还被配置为确定给至少一个基站的至少一个服务单元160的向至少一个无人机提供服务的指令。处理单元的所有确定都包括至少一个无人机的至少一个传感器单元的感测信息的利用。
171.在示例中,至少一个无人机的至少一个传感器单元50被配置为确定感测信息,其包括感测以下一项或多项的功能:至少一个储液器20、至少一个液体施用单元30和至少一个操作单元40,并且将感测信息转送给处理单元。
172.在另一个示例中,所述系统还包括具有至少一个传感器单元190的基站。在另一个示例中,至少一个基站的至少一个传感器单元被配置为确定感测信息,其包括感测以下一项或多项:用于旨在对接到基站的uav的剩余机场容量、一个或多个储液器的库存、有一种或多种活性成分的一种或多种液体、一个或多个液体施用单元、基站上备有的一个或多个操作单元,以及其中感测信息被转发给处理单元。
173.在另一个示例中,处理单元的确定包括至少一个无人机的至少一个传感器单元和
至少一个基站的至少一个传感器单元的感测信息的利用。
174.在另一个示例中,可能有多于一个处理单元。
175.在另一个示例中,至少一个uav包括处理单元,并且至少一个基站包括处理单元。在这种情况下,每个处理单元都有一些通用的指令或命令集,这样至少有一些(如果不是全部)进程可以在多于一个处理单元上执行。
176.在示例中,系统的不同组件(诸如例如uav的一个或多个摄像头、至少一个uav的至少一个传感器单元、至少一个基站的至少一个传感器单元、一个或多个处理单元、至少一个uav、至少一个基站和/或至少一个基站的至少一个服务单元)之间的数据通信可以适应有线或无线链路(包括地面或卫星链路)通过网络(诸如局域网、广域网、互联网或因特网)发生。
177.图4a示出了以其基本步骤用至少一个无人机和至少一个基站将活性成分施用到农作物上的方法300。该方法300包括:保存步骤310,也称为步骤a),将包含活性成分的液体保存在至少一个储液器中,该储液器装载在至少一个无人机内或附接到至少一个无人机,其中至少一个液体施用单元装载在至少一个无人机中或附接到至少一个无人机,并且至少一个液体施用单元与至少一个储液器流体连通;
178.在装载步骤320中,也称为步骤b),将至少一个操作单元装载在至少一个无人机内或附接到至少一个无人机,该操作单元被配置为使至少一个无人机能够飞行;
179.在装载步骤330中,也称为步骤c),将至少一个传感器单元装载在至少一个无人机内或附接到至少一个无人机,该传感器单元被配置为确定感测信息,包括感测以下一项或多项的功能:至少一个储液器、至少一个液体施用单元、至少一个操作单元;
180.在装载步骤340中,也称为步骤d),将至少一个服务单元装载在至少一个基站内或附接到至少一个基站;
181.在感测步骤350中,也称为步骤e),用至少一个传感器单元感测以下一项或多项的功能:至少一个储液器、至少一个液体施用单元、至少一个操作单元,以提供感测信息并且将其转送给处理单元;
182.在对接步骤360中,也称为步骤f),如果处理单元如此指示,则将至少一个无人机对接到至少一个基站,其中指令的确定包括感测信息的利用;以及
183.在服务步骤370中,也称为步骤f),如果处理单元如此指示,则用至少一个基站的至少一个服务单元为至少一个无人机服务,其中指令的确定包括感测信息的利用。
184.在示例中,在步骤c)中,将至少一个传感器单元装载在至少一个无人机内或附接到至少一个无人机,该传感器单元被配置为感测至少一个储液器内的液位;在步骤f)中,将至少一个无人机对接到至少一个基站;以及在步骤g)中,如果处理单元如此指示,则用包含活性成分的液体再填充至少一个储液器和/或交换至少一个储液器,其中指令的确定包括至少一个储液器内的液位的感测信息的利用。
185.在示例中,在步骤c)中,将至少一个传感器单元装载在至少一个无人机内或附接到至少一个无人机,该传感器单元被配置为感测至少一个液体施用单元的操作性;在步骤f)中,将至少一个无人机对接到至少一个基站;以及在步骤g)中,如果处理单元如此指示,则清洗、维修和/或交换至少一个液体施用单元或其部分,其中指令的确定包括至少一个液体施用单元的操作性的感测信息的利用。
186.在示例中,在步骤c)中,将至少一个传感器单元装载在至少一个无人机内或附接到至少一个无人机,该传感器单元被配置为感测至少一个操作单元的操作性;在步骤f)中,将至少一个无人机对接到至少一个基站;以及在步骤g)中,如果处理单元如此指示,则修复至少一个操作单元,其中指令的确定包括至少一个操作单元的操作性的感测信息的利用。
187.在示例中,在步骤e)中,用至少一个传感器单元感测以下项的功能:至少一个储液器、至少一个液体施用单元和至少一个操作单元,以提供感测信息并且将其转送给处理单元。
188.在示例中,在步骤b)中,至少一个操作单元包括以下一项或多项:动力单元、飞行控制单元、螺旋桨发动机单元、螺旋桨叶片单元和框架。
189.在示例中,在步骤d)中,至少一个基站包括至少一个传感器单元,其被配置为确定感测信息,其包括感测以下一项或多项:基站上备有的用于旨在对接到基站的一个或多个无人机的剩余机场容量、一个或多个储液器的库存、有一种或多种活性成分的一种或多种液体、一个或多个液体施用单元、一个或多个操作单元,以及在步骤f)中,将至少一个无人机对接到至少一个基站,以及在步骤g)中,如果处理单元如此指示,则用至少一个基站的至少一个服务单元为至少一个无人机服务,其中指令的确定包括一个或多个无人机的至少一个传感器单元和一个或多个基站的至少一个传感器单元的感测信息的利用。
190.图4b示出了以其基本步骤通过无人机将活性成分施用到农作物上的方法400。该方法400包括:保存步骤410,也称为步骤a),将包含活性成分的液体保存在至少一个储液器中,该储液器装载在无人机内或附接到无人机,其中至少一个液体施用单元装载在无人机内或附接到无人机,并且至少一个液体施用单元与至少一个储液器流体连通;
191.在装载步骤420中,也称为步骤b),将至少一个操作单元装载在无人机内或附接到无人机,该操作单元被配置为使无人机能够飞行;
192.在装载步骤430中,也称为步骤c),将至少一个传感器单元装载在无人机内或附接到无人机,该传感器单元被配置为确定感测信息,其包括感测以下一项或多项的功能:至少一个储液器、至少一个液体施用单元、至少一个操作单元;
193.在感测步骤440中,也称为步骤d),用至少一个传感器单元感测以下一项或多项的功能:至少一个储液器、至少一个液体施用单元、至少一个操作单元,以提供感测信息并且将其转送给处理单元;以及
194.在确定步骤450中,也称为步骤e),通过处理单元确定给无人机的与基站对接并且从基站获得服务的指令,其中确定步骤包括感测信息的利用。
195.在示例中,在步骤c)中,将至少一个传感器单元装载在无人机内或附接到无人机,该传感器单元被配置为感测至少一个储液器内的液位;在步骤d)中,用至少一个传感器单元感测至少一个储液器内的液位,以提供感测信息并且将其转送给处理单元;以及在步骤e)中,通过处理单元确定给无人机的与基站对接并且用包含活性成分的液体再填充至少一个储液器和/或交换至少一个储液器的指令,其中确定步骤包括至少一个储液器内的液位的感测信息的利用。
196.在示例中,在步骤c)中,将至少一个传感器单元装载在无人机内或附接到无人机,该传感器单元被配置为感测至少一个液体施用单元的操作性;在步骤d)中,感测至少一个液体施用单元的操作性,以提供感测信息并且将其转送给处理单元;以及在步骤e)中,通过
处理单元确定给无人机的与基站对接并且清洗、维修和/或交换至少一个液体施用单元或其部分的指令,其中确定步骤包括至少一个液体施用单元的操作性的感测信息的利用。
197.在示例中,在步骤c)中,将至少一个传感器单元装载在无人机内或附接到无人机,该传感器单元被配置为感测至少一个操作单元的操作性;在步骤d)中,感测至少一个操作单元的操作性,以提供感测信息并且将其转送给处理单元;以及在步骤e)中,通过处理单元确定给无人机的与基站对接并且修复至少一个操作单元的指令,其中确定步骤包括至少一个操作单元的操作性的感测信息的利用。
198.在示例中,在步骤d)中,用至少一个传感器单元感测以下项的功能:至少一个储液器、至少一个液体施用单元和至少一个操作单元,以提供感测信息并且将其转送给处理单元。
199.在示例中,在步骤b)中,至少一个操作单元包括以下一项或多项:动力单元、飞行控制单元、螺旋桨发动机单元、螺旋桨叶片单元和框架。
200.图4c示出了以其基本步骤用基站为无人机服务的方法500。该方法500包括:保存步骤510,也称为步骤a),将至少一个服务单元保存在基站内或附接到基站;
201.在保存步骤520中,也称为步骤b),将包含活性成分的液体保存在至少一个储液器中,该储液器装载在无人机内或附接到无人机,其中至少一个液体施用单元装载在无人机内或附接到无人机,并且至少一个液体施用单元与至少一个储液器流体连通;
202.在装载步骤530中,也称为步骤c),将至少一个操作单元装载在无人机内或附接到无人机,该操作单元被配置为使无人机能够飞行;
203.在装载步骤540中,也称为步骤d),将至少一个传感器单元装载在无人机内或附接到无人机,该传感器单元被配置为确定感测信息,其包括感测以下一项或多项的功能:至少一个储液器、至少一个液体施用单元、至少一个操作单元;
204.在感测步骤550中,也称为步骤e),用至少一个传感器单元感测以下一项或多项的功能:至少一个储液器、至少一个液体施用单元、至少一个操作单元,以提供感测信息并且将其转送给处理单元;
205.在确定步骤560中,也称为步骤f),通过处理单元确定给基站的使无人机能够与基站对接的指令,其中确定步骤包括感测信息的利用;以及
206.在确定步骤570中,也称为步骤g),确定给位于基站内或附接到基站的至少一个服务单元的通过处理单元向无人机提供服务的指令,其中确定步骤包括感测信息的利用。
207.在示例中,在步骤d)中,将至少一个传感器单元装载在无人机内或附接到无人机,该传感器单元被配置为感测至少一个储液器内的液位,以及在步骤e)中,感测至少一个储液器内的液位,以及在步骤f)中,通过处理单元确定给基站的使无人机能够与基站对接的指令,其中确定步骤包括感测信息的利用;以及在步骤g)中,通过处理单元确定给位于基站内或附接到基站的至少一个服务单元的用包含活性成分的液体再填充一个或多个无人机的至少一个储液器和/或将一个或多个无人机的至少一个储液器与被包含活性成分的液体至少部分地填充的(通常是满的)储液器交换的指令,其中确定步骤包括感测信息的利用。
208.在示例中,在步骤d)中,将至少一个传感器单元装载在无人机内或附接到无人机,该传感器单元被配置为感测至少一个液体施用单元的操作性,以及在步骤e)中,感测至少一个液体施用单元的操作性,以及在步骤f)中,通过处理单元确定给基站的使无人机能够
与基站对接的指令,其中确定步骤包括感测信息的利用;以及在步骤g)中,通过处理单元确定给位于基站内或附接到基站的至少一个服务单元的清洗、维修和/或更换至少一个液体施用单元或其部分的指令,其中确定步骤包括感测信息的利用。
209.在示例中,在步骤d)中,将至少一个传感器单元装载在无人机内或附接到无人机,该传感器单元被配置为感测至少一个操作单元的操作性,以及在步骤e)中,感测至少一个操作单元的操作性,以及在步骤f)中,通过处理单元确定给基站的使无人机能够与基站对接的指令,其中确定步骤包括感测信息的利用;以及在步骤g)中,通过处理单元确定给位于基站内或附接到基站的至少一个服务单元的修复至少一个操作单元的指令,其中确定步骤包括感测信息的利用。
210.在示例中,在步骤e)中,用至少一个传感器单元感测以下项的功能:至少一个储液器、至少一个液体施用单元和至少一个操作单元,以提供感测信息并且将其转送给处理单元。
211.在示例中,在步骤a)中,将至少一个传感器单元装载在基站内或附接到基站,该传感器单元被配置为确定感测信息,其包括感测以下一项或多项:基站上备有的用于旨在对接到基站的一个或多个无人机的剩余机场容量、一个或多个储液器的库存、有一种或多种活性成分的一种或多种液体、一个或多个液体施用单元、一个或多个操作单元,以及在步骤e)中,感测以下一项或多项:基站上备有的用于旨在对接到基站的一个或多个无人机的剩余机场容量、一个或多个储液器的库存、有一种或多种活性成分的一种或多种液体、一个或多个液体施用单元、一个或多个操作单元,以及在步骤f)中,通过处理单元确定给基站的使无人机能够与基站对接的指令,其中确定步骤包括感测信息的利用;以及在步骤g)中,通过处理单元确定给位于基站内或附接到基站的至少一个服务单元的通过至少一个服务单元获得服务的指令,其中确定步骤包括感测信息的利用;
212.用于将活性成分施用到农作物上的无人机、基站、用于将活性成分施用到农作物上的系统以及通过无人机将活性成分施用到农作物上的方法关于图5和图6所示的非常详细的实施方案进行描述。
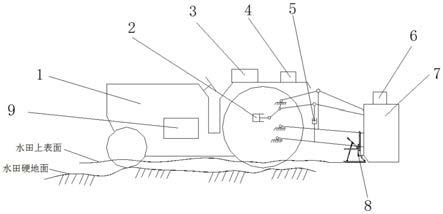
213.在图5a中,示出了具有储液器的无人驾驶飞机。该无人驾驶飞机具有用于测量储液器中的液位的传感器,并且储液器具有到液体施用单元(喷雾杆)的流体连接。喷雾杆确实有三个喷嘴。储液器下方的矩形表示动力单元,诸如电池。矩形右边的圆圈表示测量电池电量的传感器。另外,喷雾杆的喷嘴处的摄像头感测系统的喷洒模式,并且提供关于喷嘴的操作性的指示。液位、电池电量和喷嘴的操作性的感测信息被传输给图片中未显示的处理单元。当电池电量低,储液器中的液位低和/或喷嘴被阻塞或堵塞时,处理单元被配置为确定给无人机的与基站对接并且从基站获得服务的指令。
214.图5b示出了对接到基站的无人驾驶飞机。该图示出了对电池进行再充电并且用包含活性成分的液体再填充储液器。为了达到效果,意图是两种服务同时进行,即使例如电池可能仍然有能量或储液器确实仍然包括许多含有活性成分的液体。如图所示,机械臂支持再填充,并且在基站上的储液器与无人驾驶飞机上要被填充的储液器之间建立流体连接。同时,电池(被示出为无人驾驶飞机的储液器下面的矩形)连接到电池充电器,作为基站的部分。电池与电池充电器之间的连接也是自主进行的,例如作为无人驾驶飞机到基站的对接过程的部分。
215.图6示出了两架无人驾驶飞机和两个基站。无人驾驶飞机确实有流体连接的储液器和液体施用单元(有三个喷嘴的喷雾杆)。喷雾杆正在向农作物喷洒含有活性成分的液体。当无人驾驶飞机的液位传感器指示储液器内的剩余液体的液位低时,无人驾驶飞机正在前往最近的基站以获得服务以获得服务,如果无人驾驶飞机的电池电量低和/或例如当喷雾杆的喷嘴之一堵塞时。基站确实有服务单元,该服务单元包括机械臂(在矩形的右下角)、电池充电器(在矩形的左下角)、用于再填充(多架)无人驾驶飞机的一个或多个储液器的储液器(在矩形右侧的顶部)以及可以被拧入喷雾杆的喷嘴(如矩形的左侧的顶部所示)。机械臂支持以下服务:用液体再填充储液器、为电池再充电和/或从喷雾杆上拧下一个或多个堵塞的喷嘴并且将新的分别清洗过的喷嘴拧入喷雾杆。此外,无人驾驶飞机有摄像头,用于将图像信息传输给处理单元(未示出),同时处理单元进行图像分析,以管理无人驾驶飞机的喷洒和飞行活动。
216.在另一个示例性实施方案中,提供计算机程序或计算机程序元件,其特征在于其被配置为在适当的系统上执行根据前述实施方案之一的方法的方法步骤。
217.因此,计算机程序元件可能被存储在计算机单元上,这也可能是实施方案的部分。该计算单元可以被配置为执行或诱导执行上述方法的步骤。此外,它可以被配置为操作上述装置和/或系统的组件。计算单元可以被配置为自动操作和/或执行用户的命令。计算机程序可以加载到数据处理器的工作存储器中。因此,可以配备数据处理器,以执行根据前述实施方案之一的方法。
218.本发明的该示例性实施方案包括两个方面,即从一开始就使用本发明的计算机程序和通过更新将现有程序变成使用本发明的程序的计算机程序。
219.而且,计算机程序元件可能能够提供所有必要的步骤来实现上述方法的示例性实施方案的过程。
220.根据本发明的另一个示例性实施方案,提出了计算机可读介质,诸如cd
‑
rom、u盘等,其中计算机可读介质上存储有计算机程序元素,这种计算机程序元素是由前一章节描述的。
221.计算机程序可以被存储或分配到合适的介质上,诸如与其他硬件一起提供或作为其他硬件的部分提供的光学存储介质或固态介质,但是也可以按照其他形式分配,诸如通过因特网或其他有线或无线电信系统。
222.然而,计算机程序也可以通过网络(如万维网)呈现,并且可以从这种网络下载到数据处理器的工作存储器中。根据本发明的另一个示例性实施方案,提供了用于使计算机程序元素可用于下载的介质,这种计算机程序元素被设置为执行根据本发明的前述实施方案之一的方法。
223.必须注意,本发明的实施方案参照不同的主题进行描述。具体地,一些实施方案参照方法类型权利要求进行描述,而其他实施例参照设备类型权利要求进行描述。然而,本领域技术人员从上述描述和以下描述获悉,除非另有通知,否则除了属于一个主题类型的特征的任何组合之外,也认为本技术公开了与不同的主题相关的特征之间的任何组合。
224.虽然本发明已经在图和前述描述中进行了详细图示和描述,但是这种图示和描述被认为是说明性或示例性的,而不是限制性的。本发明并不限于所公开的实施例。所公开的实施例的其他变型通过对图、公开内容和从属权利要求的研究在实践所要求保护的本发明
时可以被本领域技术人员理解和实现。
225.在权利要求中,词语“包括”不排除其他元件或步骤,并且不定冠词“一种”或“一个”不排除复数形式。单个处理器或其他单元可以实现权利要求中所述的若干项的功能。在相互不同的从属权利要求中说明某些措施这一事实并不表明这些措施的组合不能够被有利地使用。权利要求书中的任何参考符号都不应被视为限制范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。