1.本发明涉及焊接机技术领域,尤其涉及一种避免波纹管打卷的环缝焊接机。
背景技术:
2.环缝焊接机是一种能完成各种圆形、环形焊缝焊接的通用自动焊接设备,燃气用波纹管在连接其他管道或阀门时需在波纹管连接端部焊接连接时用的接头。
3.公开号cn102974914b的中国专利文献中公开了波纹管环缝焊接机,记载了“包括支架,还包括连接在支架上部用于带动焊枪移动的焊枪移动机构以及连接在支架下部用于带动焊件旋转的焊件旋转机构,焊枪移动机构相对支架移动来调节焊接位置,焊件旋转机构在焊接过程中带动焊件不断旋转使焊料在焊件上形成环形焊缝”,该波纹管环缝焊接机能够准确控制焊接位置,提高焊接质量,简易焊接操作,且自动化程度高。
4.公开号cn209477561u的中国专利文献中公开了一种波纹管环缝焊接机,记载了“包括机体,所述机体的上表面设置有工作台,所述工作台的上表面设置有支撑板,所述支撑板的上表面设置有支撑架,所述支撑架的上表面设置有液压缸,所述液压缸的外壁上设置有液压伸缩杆,所述液压伸缩杆的一端设置有焊枪,所述焊枪的一端设置有调节旋钮,所述调节旋钮的一侧设置有把手,所述把手的外壁上设置有扳机,所述焊枪的另一端设置有焊嘴,所述支撑架的一侧设置有伺服电机,所述伺服电机的一侧设置有固定件,所述固定件的内部设置有固定板,所述固定板的内部设置有固定槽”,该装置通过设置的盛放筒起到盛放波纹管的作用,从而有效的避免了波纹管在环缝焊接的过程中发生错位的问题。
5.但是上述采用的方法均为使用焊接变位器装夹管子,通过电机带动管子的旋转,焊枪则固定在基座上,通过气缸定位到焊缝处,点火利用接管自身的材料自融连接波纹管事先加工好的焊接面,旋转一圈后息弧,这样就形成一道环环缝,将波纹管所需要的连接接头就焊接上去了,但是燃气连接管道有长有短,而焊接设备使用的传动方式是利用管子旋转焊接,这样对于一些短的管子没有什么问题,但是对于长管子,旋转管子阻力就非常大,有时会影响焊接质量,对管子本身也加入了一定的扭力,对操作人员的操作技能要求过高。
技术实现要素:
6.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种避免波纹管打卷的环缝焊接机。
7.为了实现上述目的,本发明采用了如下技术方案:
8.一种避免波纹管打卷的环缝焊接机,包括机架,所述机架的顶部固定焊接有台面板,所述台面板的上表面固定安装有回转机构,所述回转机构的顶部固定安装有焊接室,所述台面板的上表面固定安装有焊枪微调机构,所述焊枪微调机构包括平移装置,所述平移装置的正面设置有定位装置,所述台面板的上表面固定安装有压紧机构,所述机架的内部设置有氩弧焊机,所述机架的内部设置有气动系统,所述机架的内部固定安装有电器系统,所述机架的内部固定安装有水银滑环,所述水银滑环的顶部设置有多个流体滑环。
9.优选的,所述回转机构包括步进电机,所述步进电机的输出端固定连接有输出轴,所述步进电机的输出轴固定套接有齿轮,所述齿轮啮合有回转支承,所述回转支承的外圈通过螺钉固定连接有回转面板,所述回转支承的内圈通过螺钉与台面板固定连接,启动步进电机,步进电机通过输出轴带动齿轮转动,齿轮通过回转支承带动回转面板转动。
10.优选的,所述平移装置包括平移座,所述平移座与回转面板的上表面固定连接,所述平移座的外壁转动连接有丝杠,所述丝杠的外壁螺纹连接有移动座,所述丝杠的顶端固定连接有转把,手动转动转把,转把带动丝杠转动,丝杠能够带动移动座上下移动。
11.优选的,所述定位装置包括滑台,所述滑台的一侧外壁固定安装有第一气缸,所述第一气缸的输出端固定连接有安装座,所述滑台的外壁固定安装有滑轨,所述滑轨与安装座滑动连接,启动第一气缸,第一气缸带动安装座移动。
12.优选的,所述氩弧焊机包括焊枪,所述焊枪与安装座固定连接,安装座水平移动时,能够带动焊枪水平移动,通过第一气缸将焊枪定位到波纹管的焊缝处,所述移动座与滑台的背部外壁固定连接,移动座能够带动滑台上、下移动,从而调整焊枪的高度,从而能够根据焊缝的位置对焊枪的高度进行微调。
13.优选的,所述压紧机构包括支撑架,所述支撑架与台面板的上表面固定连接,所述支撑架的顶部固定安装有第二气缸,所述第二气缸的输出端固定连接有气缸夹具,所述气缸夹具位于焊接室的正上方,启动气缸夹具,通过气缸夹具对波纹管进行夹持,从而对波纹管进行固定,启动第二气缸,第二气缸带动气缸夹具向下移动,气缸夹具带动波纹管向下移动,由于波纹管具有一定弹性,从而使波纹管对连接接头表面上施加压力,使波纹管与连接接头紧密贴合。
14.优选的,所述焊接室包括底座,所述底座底部与回转面板通过螺钉固定连接,所述底座位于回转面板的中部,所述底座的上表面焊接有圆筒,所述圆筒的一侧侧壁开设有第一开口,所述圆筒的另一侧固定安装有观测窗,所述圆筒的内部转动连接有定位座,所述圆筒的顶部开设有第二开口,所述圆筒的底部输入端固定连接有进气管,所述进气管的另一端与流体滑环相连接,流体滑环的另一端与通入惰性气体的气罐连接,将连接接头通过第二开口放入圆筒内,且定位座与连接接头相互套接,然后将波纹管通过第二开口插入圆筒内,波纹管与定位座相互套接,波纹管端口与连接接头相互接触,定位座用于使波纹管与连接接头保持同心度,使波纹管与连接接头的中轴线在一条直线上。
15.优选的,所述第一开口与焊枪位于同一侧,且相互对应,所述氩弧焊机、焊枪与水银滑环电性连接。
16.本发明的有益效果为:
17.1、本发明中,采用步进电机带动焊枪旋转,而波纹管通过气缸夹具固定于中间,相对于焊接机而言,波纹管和连接接头固定,焊枪是围绕需要焊接的环焊缝固定距离焊接一圈360度,从而得到需要的环焊缝,解决长波纹管打卷现象,从而解决长波纹管焊接难问题,降低操作人员的操作技能要求。
18.2、本发明中,通过焊接室的设计,使焊接室内通入一定量的惰性气体形成一个封闭的焊接室,保护焊接过程中的焊道不被氧化,降低焊缝泄漏风险。
19.3、本发明中,通过第二气缸带动气缸夹具向下移动,气缸夹具带动波纹管向下移动,由于波纹管具有一定弹性,从而使波纹管对连接接头表面上施加压力,使波纹管与连接
接头紧密贴合,进一步降低焊缝泄漏风险,
20.4、本发明中,当安装座水平移动时,安装座能够带动焊枪水平移动,通过第一气缸将焊枪定位到波纹管的焊缝处,同时移动座能够带动滑台上、下移动,从而调整焊枪的高度,从而能够根据焊缝的位置对焊枪的高度进行微调。
附图说明
21.图1为本发明的一种避免波纹管打卷的环缝焊接机的主视图。
22.图2为本发明的一种避免波纹管打卷的环缝焊接机的侧视图。
23.图3为本发明的一种避免波纹管打卷的环缝焊接机的回转机构的结构示意图。
24.图4为本发明的一种避免波纹管打卷的环缝焊接机的回转支承的结构示意图。
25.图5为本发明的一种避免波纹管打卷的环缝焊接机的焊枪微调机构的结构示意图。
26.图6为本发明的一种避免波纹管打卷的环缝焊接机的平移装置的结构示意图。
27.图7为本发明的一种避免波纹管打卷的环缝焊接机的定位装置的结构示意图。
28.图8为本发明的一种避免波纹管打卷的环缝焊接机的焊枪的结构示意图。
29.图9为本发明的一种避免波纹管打卷的环缝焊接机的压紧机构的结构示意图。
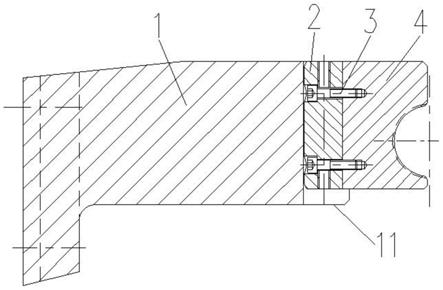
30.图10为本发明的一种避免波纹管打卷的环缝焊接机的焊接室的结构示意图。
31.图中标号:1、机架;2、台面板;3、回转机构;301、步进电机;302、齿轮;303、回转支承;304、回转面板;4、焊枪微调机构;401、平移装置;40101、平移座;40102、丝杠;40103、移动座;40104、转把;402、定位装置;40201、滑台;40202、第一气缸;40203、滑轨;40204、安装座;5、压紧机构;501、支撑架;502、第二气缸;503、气缸夹具;6、电器系统;7、氩弧焊机;701、焊枪;8、焊接室;801、底座;802、圆筒;803、第一开口;804、观测窗;805、定位座;806、第二开口;807、进气管;9、气动系统;10、水银滑环;11、流体滑环。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
33.实施例:
34.如附图1至附图10所示:
35.一种避免波纹管打卷的环缝焊接机,包括机架1,机架1的顶部固定焊接有台面板2,台面板2的上表面固定安装有回转机构3,回转机构3的顶部固定安装有焊接室8,台面板2的上表面固定安装有焊枪微调机构4,焊枪微调机构4包括平移装置401,平移装置401的正面设置有定位装置402,台面板2的上表面固定安装有压紧机构5,机架1的内部设置有氩弧焊机7,机架1的内部设置有气动系统9,机架1的内部固定安装有电器系统6,机架1的内部固定安装有水银滑环10,水银滑环10的顶部设置有多个流体滑环11。
36.请参阅图3
‑
4,回转机构3包括步进电机301,步进电机301的输出端固定连接有输出轴,步进电机301的输出轴固定套接有齿轮302,齿轮302啮合有回转支承303,回转支承303的外圈通过螺钉固定连接有回转面板304,回转支承303的内圈通过螺钉与台面板2固定连接,启动步进电机301,步进电机301通过输出轴带动齿轮302转动,齿轮302通过回转支承
303带动回转面板304转动。
37.请参阅图5
‑
6,平移装置401包括平移座40101,平移座40101与回转面板304的上表面固定连接,平移座40101的外壁转动连接有丝杠40102,丝杠40102的外壁螺纹连接有移动座40103,丝杠40102的顶端固定连接有转把40104,手动转动转把40104,转把40104带动丝杠40102转动,丝杠40102能够带动移动座40103上下移动。
38.请参阅图7,定位装置402包括滑台40201,滑台40201的一侧外壁固定安装有第一气缸40202,第一气缸40202的输出端固定连接有安装座40204,滑台40201的外壁固定安装有滑轨40203,滑轨40203与安装座40204滑动连接,启动第一气缸40202,第一气缸40202带动安装座40204移动。
39.请参阅图5
‑
7,氩弧焊机7包括焊枪701,焊枪701与安装座40204固定连接,安装座40204水平移动时,能够带动焊枪701水平移动,通过第一气缸40202将焊枪701定位到波纹管的焊缝处,移动座40103与滑台40201的背部外壁固定连接,移动座40103能够带动滑台40201上、下移动,从而调整焊枪701的高度,从而能够根据焊缝的位置对焊枪701的高度进行微调。
40.请参阅图9,压紧机构5包括支撑架501,支撑架501与台面板2的上表面固定连接,支撑架501的顶部固定安装有第二气缸502,第二气缸502的输出端固定连接有气缸夹具503,气缸夹具503位于焊接室8的正上方,启动气缸夹具503,通过气缸夹具503对波纹管进行夹持,从而对波纹管进行固定,启动第二气缸502,第二气缸502带动气缸夹具503向下移动,气缸夹具503带动波纹管向下移动,由于波纹管具有一定弹性,从而使波纹管对连接接头表面上施加压力,使波纹管与连接接头紧密贴合。
41.请参阅图10,焊接室8包括底座801,底座801底部与回转面板304通过螺钉固定连接,底座801位于回转面板304的中部,底座801的上表面焊接有圆筒802,圆筒802的一侧侧壁开设有第一开口803,圆筒802的另一侧固定安装有观测窗804,圆筒802的内部转动连接有定位座805,圆筒802的顶部开设有第二开口806,圆筒802的底部输入端固定连接有进气管807,进气管807的另一端与流体滑环11相连接,流体滑环11的另一端与通入惰性气体的气罐连接,将连接接头通过第二开口806放入圆筒802内,且定位座805与连接接头相互套接,然后将波纹管通过第二开口806插入圆筒802内,波纹管与定位座805相互套接,波纹管端口与连接接头相互接触,定位座805用于使波纹管与连接接头保持同心度,使波纹管与连接接头的中轴线在一条直线上。
42.请参阅图1
‑
10,第一开口803与焊枪701位于同一侧,且相互对应,氩弧焊机7、焊枪701与水银滑环10电性连接。
43.本发明中需要理解的是,气动系统9包括空气压缩机、储气罐、空气净化设备、和输出管道,空气压缩机为气动系统9的动力源,储气罐用于稳压和储存空气,空气净化设备过滤压缩空气中的杂质,输出管道用于对气体进行输送,输出管道的输出端与602、603的进气端口相连接,输出管道与的输入端流体滑环11相连接,流体滑环11的输出端通过输出管道与第一气缸40202的进气端口相连接,各输出管道上均安装有控制阀,控制阀用于对压缩空气进行方向控制,电器系统6为步进电机301和氩弧焊机7提供工作电源,同时文中出现的电器元件均与外界的主控器及220v市电电连接,并且主控器可为计算机等起到控制的常规已知设备。
44.本实施例的具体使用方式与作用:
45.本发明使用时,首先将连接接头通过第二开口806放入圆筒802内,且定位座805与连接接头相互套接,然后将波纹管通过第二开口806插入圆筒802内,波纹管与定位座805相互套接,波纹管端口与连接接头相互接触,定位座805用于使波纹管与连接接头保持同心度,使波纹管与连接接头的中轴线在一条直线上,启动气缸夹具503,通过气缸夹具503对波纹管进行夹持,从而对波纹管进行固定,启动第二气缸502,第二气缸502带动气缸夹具503向下移动,气缸夹具503带动波纹管向下移动,由于波纹管具有一定弹性,从而使波纹管对连接接头表面上施加压力,使波纹管与连接接头紧密贴合;
46.通过进气管807往圆筒802内通入惰性气体氩气,保护焊接过程中的焊道不被氧化,启动第一气缸40202,第一气缸40202带动安装座40204移动,安装座40204带动焊枪701移动,焊枪701通过第一开口803插入圆筒802内,通过第一气缸40202将焊枪701定位到波纹管的焊缝处,启动步进电机301,步进电机301通过输出轴带动齿轮302转动,齿轮302通过回转支承303带动回转面板304转动,回转面板304带动其上表面的圆筒802和焊枪701转动,相对于设备而言,波纹管、连接接头和定位座805固定,此时焊枪701延波纹管的焊缝旋转一圈,从而得到需要的环焊缝,解决长波纹管打卷现象。
47.上述结构及过程请参阅图1
‑
10。
48.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
49.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
50.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。