技术特征:
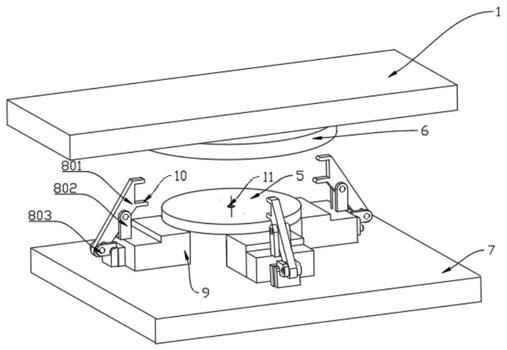
1.一种环形式运输的法兰清洁机器人,其特征在于,包括:工作台基座,固定在所述工作台基座上方,且相互平行对称的工作箱,固定设置在所述工作箱内部的环状运输链;清洁组件,包括活动连接在所述工作箱内侧的支撑板,与所述支撑板平行且相对运动的第一喷淋头,沿所述喷淋头外侧周向设置的夹紧组件,与所述夹紧组件内侧固定连接的导向件,以及活动连接在所述导向件内部的喷淋头形成喷淋区域。2.根据权利要求1所述的一种环形式运输的法兰清洁机器人,其特征在于:所述夹紧组件包括与所述导向件以预定角度相对运动的夹紧件,与所述夹紧件转动连接且固定在所述导向件一侧的支撑件,以及沿所述导向件竖向延伸预定距离与所述夹紧件转动连接的限位件。3.根据权利要求1所述的一种环形式运输的法兰清洁机器人,其特征在于:所述导向件为阶梯型,内侧沿竖向延伸设置有螺纹线与所述第一喷淋头配合,用于调节喷淋区域。4.根据权利要求2所述的一种环形式运输的法兰清洁机器人,其特征在于:所述夹紧件宽度自靠近所述支撑件一端延伸向远离支撑件的一端逐渐增大预定长度,所述夹紧件沿横向延伸预定距离,沿轴向开设有通槽;所述通槽下端沿轴向开设有通孔,用于放置弹性组件。5.根据权利要求4所述的一种环形式运输的法兰清洁机器人,其特征在于:所述弹性组件包括固定在所述通孔内的本体,活动连接在所述本体中部的顶柱,以及对称固定在所述顶柱两侧的压块,所述压块与顶柱相互垂直运动;所述顶柱两端圆弧设置,其中一端与所述压块斜面密切接触,另一端沿夹紧端面向上延伸预定距离。6.根据权利要求5所述的一种环形式运输的法兰清洁机器人,其特征在于:所述本体上端面沿顶柱轴向延伸预定距离开设有密封孔,形成压缩空间,所述密封孔直径大于顶柱直径。7.根据权利要求6所述的一种环形式运输的法兰清洁机器人,其特征在于:所述顶柱预定距离固定设置有挡块,所述挡块与密封孔底部之间固定连接有第一弹性件,所述第一弹性件与顶柱间隙配合。8.根据权利要求6所述的一种环形式运输的法兰清洁机器人,其特征在于:所述压块一侧沿横向延伸固定设置有第二弹性件,并沿第二弹性件直线移动,所述第二弹性件的另一端与所述夹紧件固定连接,所述压块高度与顶柱运动行程成正比关系。9.根据权利要求1所述的一种环形式运输的法兰清洁机器人,其特征在于:所述支撑板整体设置有多个漏水口,沿所述漏水口垂直方向延伸至环状运输链下方固定设置有集水箱。10.根据权利要求1至9任意一项所述的一种环形式运输的法兰清洁机器人的清洁方法,其特征在于包括如下步骤:s1、运输链转动带动法兰移动至喷淋头下方预定位置,机械手将法兰放置在夹紧件内;s2、夹紧件内顶柱夹取法兰,上下喷淋头对法兰实施喷淋清洁;s3、喷淋完毕后,机械手将法兰取下重新放回至传输链上;s4、如此往复,重复上述步骤;
s5、喷淋水沿支撑板渗透至集水箱,进行收集。
技术总结
本发明涉及一种环形式运输的法兰清洁机器人及其清洁方法,包括工作基座、工作箱、环状运输链以及清洁组件四部分。环形状运输方式有效减小了整体装置结构尺寸,有效提高工作效率。传输带传送有序清洁,防止遗漏,采用上下喷淋有效利用液体冲击力对法兰实施清洁,一次实现全方位多角度清洁,可调节的喷淋头有效控制液体对法兰面的冲击力以及喷淋行程,防止喷淋区域具备盲区,有效提高清洁质量。通过可转动式的夹紧件,在受到压力时,可进一步实现锁紧,喷淋过程中内部具备弹性设置的夹紧件可根据任意重量实现不同压紧力,从而有效防止水冲击力过大导致法兰晃动,弹性组件以铰扣的方式镶嵌在夹紧件中,可随意进行拆卸,保证维修方便性。性。性。
技术研发人员:张阳 李荣荣 田振华
受保护的技术使用者:南京驭逡通信科技有限公司
技术研发日:2021.07.28
技术公布日:2021/11/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。