1.本发明涉及加工设备领域,尤其涉及一种牡蛎自动开壳机和牡蛎开壳方法。
背景技术:
2.现有的牡蛎开壳装置一般需人工手动操作,如专利cn210008843u公开了一种便携式牡蛎开壳装置,包括底板、操作手柄、压缩弹簧、开壳刀、固定座,固定座通过螺栓固定于底板的左端,操作手柄通过活动栓与固定座连接,开壳刀通过螺母固定在操作手柄上端。人工开壳劳动强度大,生产效率低。
技术实现要素:
3.本发明所要解决的技术问题在于提供一种能够降低劳动强度,提高生产效率的牡蛎自动开壳机和牡蛎开壳方法。
4.本发明是通过以下技术手段实现解决上述技术问题的:牡蛎自动开壳机,包括牡蛎固定机构(1)、第一驱动机构(2)、开壳机构(3);所述第一驱动机构(2)能够带动所述开壳机构(3)向靠近或远离所述牡蛎固定机构(1)的方向运动;所述开壳机构(3)包括压针(32)、开壳手指(33)、第二驱动机构(36),两组开壳手指(33)分别位于所述压针(32)的两侧,所述第二驱动机构(36)能够带动两组开壳手指(33)相互靠近或者相互远离。通过开壳手指模仿人工开壳,实现自动牡蛎开壳,降低了劳动强度,提高了生产效率。
5.作为优化的技术方案,所述牡蛎固定机构(1)包括底座(11)、顶起机构 (12)、中间连接机构(13)、第一弹簧(14)、夹紧机构(15)、第二弹簧 (16)、受压机构(17);所述顶起机构(12)固定连接在所述底座(11)上;所述中间连接机构(13)通过所述第一弹簧(14)连接所述底座(11),所述第一弹簧(14)的伸缩方向沿靠近或远离所述开壳机构(3)的方向;所述夹紧机构(15)设有两个,两个夹紧机构(15)的内侧相对;所述夹紧机构(15) 的外侧通过所述第二弹簧(16)连接所述中间连接机构(13),所述第二弹簧 (16)的伸缩方向垂直于所述第一弹簧(14)的伸缩方向;两个夹紧机构(15) 分别位于所述顶起机构(12)的两侧,两个夹紧机构(15)朝向所述开壳机构 (3)的一端之间的距离大于两个夹紧机构(15)远离所述开壳机构(3)的一端之间的距离;所述受压机构(17)固定连接在所述中间连接机构(13)上朝向所述开壳机构(3)的一端;所述开壳机构(3)还包括施压机构(31),所述施压机构(31)与所述受压机构(17)相对。第二弹簧确保了不同大小的牡蛎均可以夹紧在两个夹紧机构之间,便于牡蛎的安放,夹紧机构的结构使牡蛎被扒开时位于两个夹紧机构之间距离较大的位置,为牡蛎外壳扒开减少了阻碍。
6.作为优化的技术方案,所述顶起机构(12)朝向所述开壳机构(3)的一端设有多个条形槽。能够确保牡蛎顶放在起机构上的位置,同时可控制牡蛎开壳后水的流向。
7.作为优化的技术方案,所述中间连接机构(13)与所述顶起机构(12)滑动配合。
8.作为优化的技术方案,所述受压机构(17)能够在所述中间连接机构(13) 上调节与所述施压机构(31)之间的距离。
9.作为优化的技术方案,所述开壳机构(3)还包括电缸支架(35),所述电缸支架(35)固定连接在所述施压机构(31)上;所述第二驱动机构(36)包括两个电缸,两个电缸分别固定连接在所述电缸支架(35)上,两个电缸的伸缩端相对,每个电缸的伸缩端分别与一组开壳手指(33)固定连接。
10.作为优化的技术方案,所述开壳机构(3)还包括开壳手指支架(34),所述开壳手指支架(34)固定连接在所述施压机构(31)上;所述开壳手指(33) 与所述开壳手指支架(34)滑动配合,所述开壳手指支架(34)限位两组开壳手指(33)之间的最大距离。
11.作为优化的技术方案,每组开壳手指(33)包括两个前后间隔设置的楔形块,两组开壳手指(33)合在一起时形成前后两个楔形结构,所述压针(32) 位于两个所述楔形结构之间。
12.作为优化的技术方案,所述第一驱动机构(2)包括电机(21)、同步带(22)、滚珠丝杠(23),所述电机(21)通过所述同步带(22)连接所述滚珠丝杠(23),所述开壳机构(3)与所述滚珠丝杠(23)的移动端固定连接。
13.采用上述牡蛎自动开壳机的牡蛎开壳方法,包括以下步骤:
14.步骤一,人工将牡蛎放在顶起机构(12)上,牡蛎放至顶起机构(12)的同时通过两个夹紧机构(15)夹紧牡蛎,此时牡蛎被夹在两个夹紧机构(15) 远离开壳机构(3)的一侧之间;
15.步骤二,第一驱动机构(2)带动开壳机构(3)向靠近牡蛎固定机构(1) 的方向运动,运动过程中施压机构(31)压在受压机构(17)上,使中间连接机构(13)和夹紧机构(15)整体沿第一弹簧(14)的收缩方向运动,从而使牡蛎运动至两个夹紧机构(15)靠近开壳机构(3)的一侧之间;
16.步骤三,压针(32)和合在一起的两组开壳手指(33)在开壳机构(3)运动的过程中压入牡蛎壳内,然后第二驱动机构(36)带动两组开壳手指(33) 相互远离,实现牡蛎的开壳动作;
17.步骤四,第一驱动机构(2)带动开壳机构(3)向远离牡蛎固定机构(1) 的方向运动,第二驱动机构(36)带动两组开壳手指(33)相互靠近,人工将开壳后的牡蛎取出。
18.本发明的优点在于:通过开壳手指模仿人工开壳,实现了自动牡蛎开壳,降低了劳动强度,提高了生产效率。
附图说明
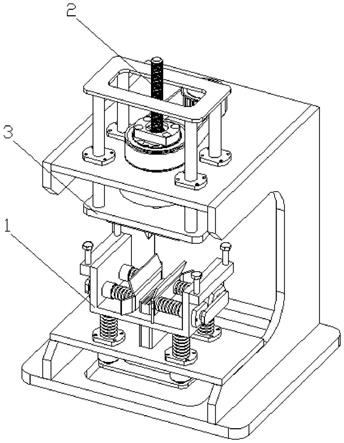
19.图1是本发明实施例牡蛎自动开壳机的轴测示意图。
20.图2是本发明实施例牡蛎固定机构的结构示意图。
21.图3是本发明实施例牡蛎自动开壳机的主视示意图。
22.图4是本发明实施例牡蛎自动开壳机的a
‑
a剖面示意图。
23.图5是本发明实施例开壳机构的结构示意图。
具体实施方式
24.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部
分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
25.如图1所示,牡蛎自动开壳机,包括牡蛎固定机构1、第一驱动机构2、开壳机构3。
26.如图1、图2所示,牡蛎固定机构1包括底座11、顶起机构12、中间连接机构13、第一弹簧14、夹紧机构15、第二弹簧16、受压机构17;顶起机构12 固定连接在底座11上,顶起机构12朝向开壳机构3的一端设有多个条形槽;中间连接机构13通过四个第一弹簧14连接底座11,第一弹簧14的伸缩方向沿靠近或远离开壳机构3的方向;中间连接机构13通过中间的开孔套在顶起机构 12上,与顶起机构12滑动配合;夹紧机构15设有两个,两个夹紧机构15的内侧相对;每个夹紧机构15的外侧通过两个第二弹簧16连接中间连接机构13,第二弹簧16的伸缩方向垂直于第一弹簧14的伸缩方向;两个夹紧机构15分别位于顶起机构12的两侧,夹紧机构15为折弯的板状,两个夹紧机构15朝向开壳机构3的一端之间的距离大于两个夹紧机构15远离开壳机构3的一端之间的距离;受压机构17固定连接在中间连接机构13上朝向开壳机构3的一端,受压机构17采用螺栓,能够在中间连接机构13上调节与施压机构31之间的距离。
27.如图3、图4所示,第一驱动机构2包括电机21、同步带22、滚珠丝杠23,电机21通过同步带22连接滚珠丝杠23,开壳机构3与滚珠丝杠23的移动端固定连接,第一驱动机构2能够带动开壳机构3向靠近或远离牡蛎固定机构1的方向运动。
28.如图5所示,开壳机构3包括施压机构31、压针32、开壳手指33、开壳手指支架34、电缸支架35、第二驱动机构36;施压机构31、压针32分别与滚珠丝杠23的移动端固定连接,施压机构31与受压机构17相对,压针3的针尖朝向顶起机构12;两组开壳手指33分别位于压针32的两侧,每组开壳手指33 包括两个前后间隔设置的楔形块,两组开壳手指33合在一起时形成前后两个楔形结构,压针32位于两个所述楔形结构之间;开壳手指支架34固定连接在施压机构31的底部,开壳手指33与开壳手指支架34滑动配合,开壳手指支架34 限位两组开壳手指33之间的最大距离;两个电缸支架35分别固定连接在施压机构31的顶部;第二驱动机构36包括两个电缸,两个电缸分别固定连接在电缸支架35上,两个电缸的伸缩端相对,每个电缸的伸缩端分别与一组开壳手指 33固定连接,第二驱动机构36能够带动两组开壳手指33相互靠近或者相互远离。
29.采用上述牡蛎自动开壳机的牡蛎开壳方法,包括以下步骤:
30.步骤一,人工将牡蛎放在顶起机构12上,牡蛎放至顶起机构12的同时通过两个夹紧机构15夹紧牡蛎,此时牡蛎被夹在两个夹紧机构15远离开壳机构3 的一侧之间,第二弹簧16确保了不同大小的牡蛎均可以夹紧;
31.步骤二,电机21驱动同步带22带动滚珠丝杠23运动,实现开壳机构3向靠近牡蛎固定机构1的方向运动,开壳机构3运动过程中施压机构31压在受压机构17上,使中间连接机构13和夹紧机构15整体沿第一弹簧14的收缩方向运动,因为牡蛎放在顶起机构12上,而顶起机构12是固定的,所以夹紧机构 15运动的过程中牡蛎的位置是相对于夹紧机构15向靠近开壳机构3的方向运动的,从而使牡蛎运动至两个夹紧机构15靠近开壳机构3的一侧之间,此处两个夹紧机构15之间的距离较大,为牡蛎外壳扒开减少了阻碍;
32.步骤三,压针32和合在一起的两组开壳手指33在开壳机构3运动的过程中压入牡蛎壳内,然后第二驱动机构36带动两组开壳手指33相互远离,实现牡蛎的开壳动作;
33.步骤四,电机21驱动同步带22带动滚珠丝杠23反向运动,实现开壳机构 3向远离牡蛎固定机构1的方向运动,第二驱动机构36带动两组开壳手指33相互靠近,人工将开壳后的牡蛎取出。
34.以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。