1.本实用新型涉及一种智能垃圾桶,尤其是涉及一种垃圾桶自动打包收袋结构及智能垃圾桶。
背景技术:
2.随着科技的进步和人们生活水平的提高,智能家居逐步成为了日常生活中不可缺少的一部分,其中,智能垃圾桶以其干净卫生、使用便捷的特点,成为人们关注的焦点。
3.现有一种智能垃圾桶的封口打包机构,采用一根或两根压杆将垃圾袋收口至垃圾投放口的一边或一角,再由封口装置与压杆配合完成封口打包。该收口打包应用较为广泛,由于其封口装置固定于垃圾投放口的一角或一边,因此其电路连接较为简单,但由于需要将垃圾袋集中至一角或一边,垃圾袋受力不均匀,造成垃圾袋单边受力被拉长,且在封口垃圾袋时不易收拢垃圾袋后封口,容易封口不良,或者收拢封口结构复杂成本高。
技术实现要素:
4.本实用新型的目的就是为了克服上述现有技术存在的缺陷而提供一种有效提高打包封口良率的垃圾桶自动打包收袋结构及智能垃圾桶。
5.本实用新型的目的可以通过以下技术方案来实现:
6.一种垃圾桶自动打包收袋结构,安装于垃圾桶本体内,包括打包装置和收拢装置,所述打包装置和收拢装置沿垃圾桶桶口边缘设置,所述打包装置包括触发所述收拢装置的触发机构,所述收拢装置包括向垃圾桶本体内部方向动作的收拢机构。
7.进一步地,所述打包装置还包括设置于垃圾桶桶口边缘的滑动轨道、打包压杆和压杆电机,所述压杆电机与打包压杆连接,所述触发机构与打包压杆连接,并共同滑动设置于滑动轨道上。
8.进一步地,所述打包装置还包括封口发热丝座,所述封口发热丝座与打包压杆和触发机构共同滑动设置于滑动轨道上。
9.进一步地,所述触发机构包括至少一个第一触发杆,设置于所述打包压杆上。
10.进一步地,所述打包压杆沿垃圾桶桶口的一侧边设置,所述第一触发杆连接于打包压杆端部。
11.进一步地,所述打包压杆包括压杆主体和设置于压杆主体上、且靠近垃圾袋一侧的软胶条。
12.进一步地,所述软胶条通过软胶条固定块连接于压杆主体上。
13.进一步地,所述收拢装置还包括第二触发杆,所述第二触发杆通过传动机构与收拢机构连接。
14.进一步地,所述收拢机构为用于从打包装置打包方向的不同方向上进行收袋的收拢杆或收拢带。
15.进一步地,所述传动机构为齿轮副或平面连杆机构。
16.本实用新型还提供一种智能垃圾桶,包括以上所述的垃圾桶自动打包收袋结构。
17.与现有技术相比,本实用新型具有如下有益效果:
18.1、本实用新型在需要进行封口时首先由打包装置对垃圾袋进行打包,打包装置动作过程中其触发机构触发收拢装置,收拢装置的收拢机构向垃圾桶本体内部方向动作,以使垃圾袋收拢到一定范围内,使垃圾袋至少四周受力最终完成封口,避免了垃圾袋受力不均容易损坏的问题,使封口更加容易,有利于提高打包封口良率。经测试封口良率可以达到99%以上。
19.2、本实用新型的收拢装置是在打包装置的触发下动作,由触发机构推动,仅需要设置一个电机即可实现打包和收拢两个动作,有利于降低成本。
20.3、本实用新型打包装置还包括封口发热丝座,该封口发热丝座与打包压杆和触发机构可以共同滑动设置于滑动轨道上,该封口发热丝座与打包压杆通过转动带一起连接于压杆电机之上,封口发热丝座与打包压杆同时从对面方向向中间运动,将垃圾袋收拢到中间位置,此时打包压杆上的触发机构触发第二触发杆,带动收拢机构将垃圾袋进一步的向中间聚拢,然后进行封口,这样的设置,可以将打包的袋口收集到垃圾桶的正中间位置,垃圾袋受力更加均匀,收袋封口更加容易方便。
21.4、本实用新型触发机构包括设置于打包压杆上的至少一个第一触发杆,可对收拢装置进行稳定的推动,收拢装置受力平衡,从而使垃圾袋的收拢效果更好。
22.5、本实用新型收拢装置的第二触发杆通过传动机构与收拢机构连接,第二触发杆在第一触发杆的推动下动作后,通过传动机构方便地带动收拢机构动作,实现垃圾袋收拢,动力传输稳定,且中间无需要电器结构,进一步节省成本。
23.6、本实用新型结构简单,可方便应用于智能垃圾桶的垃圾袋的收拢和打包,方便后续封口发热丝对其进行密封。
附图说明
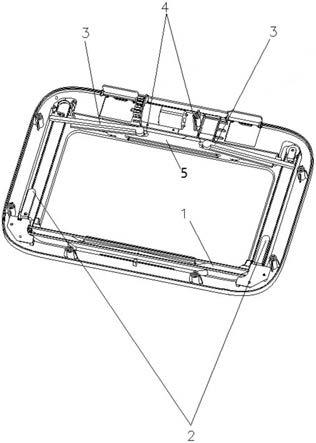
24.图1为本实用新型在初始状态时的结构示意图;
25.图2为本实用新型打包装置打包过程示意图;
26.图3为本实用新型收拢状态下的结构示意图;
27.图4为本实用新型打包装置的结构示意图;
28.图5为本实用新型收拢装置的结构示意图;
29.图6为本实用新型封口切断装置的结构示意图;
30.图中,1
‑‑‑
打包压杆,2
‑‑‑
第一触发杆,3
‑‑‑
第二触发杆,4
‑‑‑
收拢杆,5
‑‑‑
封口发热丝座,6
‑‑‑
发热丝,7
‑‑‑
齿轮副,8
‑‑‑
压杆电机,11
‑‑‑
压杆主体,12
‑‑‑
软胶条固定块,13
‑‑‑
软胶条。
具体实施方式
31.下面结合附图和具体实施例对本实用新型进行详细说明。本实施例以本实用新型技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本实用新型的保护范围不限于下述的实施例。
32.实施例1
33.本实施例提供一种垃圾桶自动打包收袋结构,安装于垃圾桶本体内,并与垃圾桶控制芯片连接,包括打包装置和收拢装置,打包装置和收拢装置沿垃圾桶桶口边缘设置,打包装置包括触发所述收拢装置的触发机构,所述收拢装置包括向垃圾桶本体内部方向动作的收拢机构。
34.如图1
‑
图3所示,打包装置还包括设置于垃圾桶桶口边缘的滑动轨道、打包压杆1和压杆电机8,压杆电机8与打包压杆1连接,触发机构与打包压杆1连接,并共同滑动设置于滑动轨道上,在打包装置向靠近所述收拢装置方向移动时,所述触发机构接触所述收拢装置并触发收拢装置动作。
35.本实施例中,触发机构包括两个第一触发杆2,分别设置于所述打包压杆1两端,在不影响垃圾桶的内部和外部空间的情况下,第一触发杆可以垂直或不垂直地连接于打包压杆1上。
36.优选地,打包压杆1沿垃圾桶桶口的一侧边设置,两个所述第一触发杆2垂直连接于打包压杆1端部,方便在前进过程中触发收拢装置,且能带动收拢装置动作。
37.如图4所示,打包压杆1包括压杆主体11和设置于压杆主体11上、且靠近垃圾袋一侧的软胶条13,可紧密压垃圾袋的同时保护垃圾袋不产生破裂。
38.本实施例中,软胶条13通过软胶条固定块12连接于压杆主体11上。
39.如图5所示,收拢装置还包括第二触发杆3,第二触发杆3通过传动机构与收拢机构连接,第二触发杆3在打包装置的运动过程中与打包装置接触,并在打包装置带动下动作,通过传动机构带动收拢机构实现旋转收拢。本实施例中,收拢机构为收拢杆4。第二触发杆3和收拢杆4设置有两组。第二触发杆3的一端部正好可与第一触发杆2接触,在第一触发杆2的带动下发生转动,从而通过齿轮副7的齿轮传动带动收拢杆4实现旋转,在打包压杆1运动到极限状态时,垃圾袋被压紧打包的同时被收拢杆收拢垃圾袋口,能够更容易对垃圾袋进行有效封口。
40.本实施例中,传动机构可采用由两个反转齿轮构成的齿轮副7,第二触发杆3和收拢杆4间的转动角度由齿轮副7的齿轮传动比确定,齿轮副7的齿轮传动比可设置为2:1,使得第二触发杆3转动45
°
时,收拢杆4可转动90
°
,方便实现垃圾袋口的有效收拢。
41.进行自动打包收袋时,打包压杆1前进,直到第一触发杆2接触并推动第二触发杆3,第二触发杆3通过齿轮传动带动收拢杆4旋转,最终将需要封口的垃圾袋收拢到由打包压杆1、收拢杆4围成的范围内,然后对垃圾袋进行封口和切断。
42.实施例2
43.本实施例提供的垃圾桶自动打包收袋结构中,打包装置还包括封口发热丝座5,封口发热丝座5与打包压杆和触发机构共同滑动设置于滑动轨道上。该封口发热丝座与打包压杆通过转动带一起连接于压杆电机之上,与打包压杆同时从对面方向向中间运动,将垃圾袋收拢到中间位置,此时打包压杆上的触发机构触发第二触发杆,带动收拢机构将垃圾袋进一步的向中间聚拢。如图6所示,封口发热丝座5内设有发热丝6。其余同实施例1。
44.实施例3
45.本实施例提供的垃圾桶自动打包收袋结构中,第一触发杆2设有一个。其余同实施例1。
46.实施例4
47.本实施例提供的垃圾桶自动打包收袋结构中,传动机构可采用平面连杆机构,第二触发杆3在第一触发杆2推动下转动时,带动收拢杆4实现收拢动作。其余同实施例1。
48.实施例5
49.本实施例提供一种智能垃圾桶,包括如实施例1
‑
4任一所述的垃圾桶自动打包收袋结构。
50.以上详细描述了本实用新型的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本实用新型的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本实用新型的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。