1.本发明涉及升降梯技术领域,特别涉及一种基于脚踩的自动化升降移动梯。
背景技术:
2.目前市场上存在各种不同形式和种类的梯子,普通梯子高度比较限定而且笨重,非常的难以挪动,传统的升降梯子需要手动将伸缩梯拔出,非常的麻烦而且容易卡住拔不出来,需要先在地面调整好高度人爬上去,当爬上去发现高度不够的时候还得重新下来调整高度,而且当需要到其他较近的地方时,还得人工下来挪梯子,非常的麻烦,人们在梯子上进行挪动时非常的危险,因此需要发明一种可以比较省力的调整高度,并且人坐到上方也可以调高并且可以驾驶移动到指定位置的梯子。
技术实现要素:
3.针对上述技术问题,本发明提供了一种基于脚踩的自动化升降移动梯,解决了传统升降梯升降费力的问题,使人在梯子上既可以调整到合适的高度,同时可以让梯子移动到指定位置,节约人工上下梯和挪动梯子的时间。
4.本发明所使用的技术方案是:一种基于脚踩的自动化升降移动梯,包括:伸缩楼梯部分和移动升降部分;所述的移动升降部分安装在伸缩楼梯部分底部的底板上,伸缩楼梯部分放置在地面上,通过伸缩楼梯部分来达到想要的高度,通过控制移动升降部分使人在梯子上也可以调整方向或者移动梯子,提高整体实用性能;所述的伸缩楼梯部分包括:空心方形框、脚踏楼梯、踩踏升降结构、升降梯子结构;所述的空心方形框为中空设计,空心方形框的内部安装有踩踏升降结构;升降梯子结构有两组,两组升降梯子结构的下端安装在空心方形框内部,脚踏楼梯固定安装在两组升降梯子结构中间位置的固定块上,通过踩踏升降结构带动升降梯子结构升降;所述的移动升降部分包括:升降挡板支撑结构、转动方向结构、脚踏移动结构;所述的升降挡板支撑结构安装在空心方形框内部,升降挡板支撑结构通过皮带与转动方向结构和脚踏移动结构连接起来,通过升降挡板支撑结构来控制移动梯子,通过转动方向结构来调整梯子的移动方向,通过脚踏移动结构使梯子进行移动。
5.进一步地,所述的踩踏升降结构包括:脚踩直板、棘轮、直齿条a、脚踏方形板、转动轴、伺服电机、所述的脚踩直板滑动安装在空心方形框内部,脚踩直板的一端与棘轮转动连接,棘轮的轴与其中一个转动轴的轴滑动连接;直齿条a滑动安装在空心方形框的内部,直齿条a的上端和下端通过弹簧与空心方形框连接,弹簧具有弹力,直齿条a的侧面与脚踏方形板的一端固定连接;直齿轮a转动安装在阶梯a侧面靠下位置的槽中,直齿轮a和转动轴通过皮带连接;转动轴有两个,两个转动轴转动安装在空心方形框内部,两个转动轴通过皮带连接,其中一个转动轴的一端与固定安装在空心方形框内的伺服电机的轴固定连接。
6.进一步地,所述的升降梯子结构包括:阶梯a、直齿轮a、大直齿轮、小直齿轮、阶梯b、阶梯c、摇把、直齿轮b、圆形转盘;所述的阶梯a的下端固定安装在空心方形框内,阶梯a的侧面靠下位置转动安装有直齿轮a,直齿轮a有若干个,直齿轮a的齿可与小直齿轮的齿啮合,阶梯a侧面的靠上位置转动安装有大直齿轮,大直齿轮有若干个,大直齿轮的齿与阶梯b侧面的齿相互啮合,大直齿轮前端的轴与小直齿轮固定连接,小直齿轮有若干个,小直齿轮转动安装在阶梯a侧面,小直齿轮的轴与直齿轮a的轴通过皮带连接;阶梯b有若干个,若干个阶梯b呈套筒形式安装;阶梯c滑动安装在若干个阶梯b的最上端,阶梯c侧面的靠下位置转动安装有直齿轮a,阶梯c的侧面靠上位置转动安装有直齿轮b, 直齿轮a的轴与直齿轮b的轴通过皮带连接;摇把安装在阶梯c的一面,摇把的前端与圆形转盘的轴固定连接,圆形转盘通过皮带与直齿轮b的轴连接。
7.进一步地,所述的升降挡板支撑结构包括:万向轮、不规则支架、支板、连接支架、直齿条b、直齿轮c、直齿条c、卡扣;所述的万向轮的上端与不规则支架固定连接,不规则支架固定安装在空心方形框内部,万向轮的上端板子与弹簧的一端固定连接,弹簧的一端与支板的上端固定连接,弹簧具有拉力;支板的侧面与连接支架固定连接,连接支架侧面的杆上固定安装有直齿条b,直齿条b的齿与直齿轮c的齿相互啮合,直齿轮c转动安装在空心方形框内部,直齿轮c的齿与直齿条c的齿相互啮合,直齿条c的上端面与卡扣的移动杆通过升缩杆固定连接。
8.进一步地,所述的转动方向结构包括:同步轮a、串联机构a、同步轮c、转向盘;所述的同步轮a有四个,每个同步轮a分别与万向轮上其中一个齿轮的轴固定连接,四个同步轮a通过皮带连接,其中一个同步轮a通过皮带与串联机构a的一个皮带轮连接,串联机构a的另一个皮带轮与同步轮c通过皮带连接起来,同步轮c转动安装在不规则支架延伸出的板子上,同步轮c的轴与转向盘的轴固定连接,转向盘上固定安装有圆杆。
9.进一步地,所述的脚踏移动结构包括:同步轮b、串联机构b、同步轮d、锥齿轮a、锥齿轮b、脚蹬、固定支架;所述的同步轮b有四个,每个同步轮b分别与万向轮上其中一个齿轮的轴固定连接,四个同步轮b通过皮带连接,其中一个同步轮b通过串联机构b与同步轮d连接,同步轮d转动安装在不规则支架中间位置的板子上,同步轮d的轴与锥齿轮a的轴固定连接,锥齿轮a的齿与锥齿轮b的齿相互啮合,锥齿轮b转动安装在固定支架上,锥齿轮b两端的轴分别与两个脚蹬固定连接,固定支架转动安装在锥齿轮a的轴上。
10.进一步地,所述的阶梯a由铁合金制成,具有强度高,抗腐蚀性好,硬度大的特点。
11.本发明与现有技术相比的有益效果是:(1)在使用梯子的时候,通过人用脚推动脚踩直板,进而推动棘轮移动,使棘轮的齿和脚踏方形板的齿相互啮合,再通过人用脚反复的踩踏脚踏方形板从而带动直齿条a不断上下移动带动棘轮朝同一个方向转动,进而带动转动轴转动使直齿轮a转动,最终使梯子升起来合适高度,方便人工调整高度,提高使用性能;(2)人在梯子上想要降下来的时候,通过转动摇把进而带动圆形转盘转动,从而带动直齿轮b转动,进一步的带动阶梯c侧面靠下位置的直齿轮a转动,进而带动大直齿轮转动进而使梯子降下来,可以让梯子下降合适高度,方便人们上下,降低重心也更加方便移动;
(3)当梯子升起来的时候,人可以通过踩着脚踏楼梯爬上去,为保证安全性,可以选择坐在脚踏楼梯最上面的支撑板上,提高安全性能;(4)当人坐在脚踏楼梯上的时候,想要调整梯子的移动方向的时候,通过握住转向盘上的圆杆带动转向盘转动,进而带动同步轮c转动,从而带动串联机构a带动同步轮a转动,进而带动万向轮改变方向,可以提升实用效率;(5)当想要降下来梯子的时候,通过触碰伺服电机侧面的开关,通过伺服电机带动转动轴进而带动直齿轮a转动,从而使梯子下降,更加安全和方便人们使用。
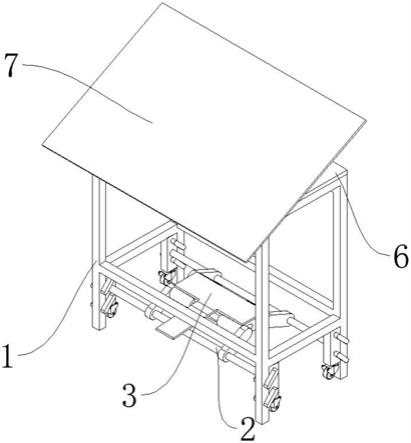
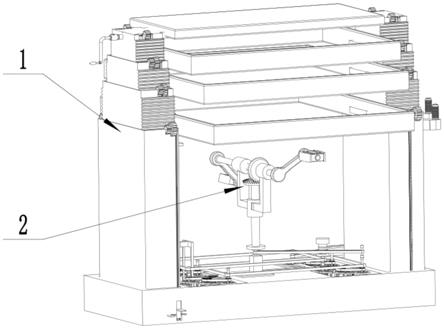
12.附图说明:图1、图2、图3为本发明的整体结构示意图。
13.图4为本发明的伸缩楼梯部分结构示意图。
14.图5为本发明的伸缩楼梯部分的踩踏升降结构示意图。
15.图6、图7、图8为本发明的伸缩楼梯部分的升降梯子结构示意图。
16.图9、图11为本发明的移动升降部分结构示意图。
17.图10为本发明的移动升降部分的e处局部放大结构示意图。
18.图12为本发明的移动升降部分的f处局部放大结构示意图。
19.附图标号:1
‑
伸缩楼梯部分;2
‑
移动升降部分;101
‑
空心方形框;102
‑
阶梯a;103
‑
脚踩直板;104
‑
棘轮;105
‑
直齿条a;106
‑
脚踏方形板;107
‑
直齿轮a;108
‑
转动轴;109
‑
伺服电机;110
‑
大直齿轮;111
‑
小直齿轮;112
‑
脚踏楼梯;113
‑
阶梯b;114
‑
阶梯c;115
‑
摇把;116
‑
直齿轮b;117
‑
圆形转盘;201
‑
万向轮;202
‑
不规则支架;203
‑
支板;204
‑
连接支架;205
‑
直齿条b;206
‑
直齿轮c;207
‑
直齿条c;208
‑
卡扣;209
‑
同步轮a;210
‑
同步轮b;211
‑
串联机构a;212
‑
同步轮c;213
‑
转向盘;214
‑
串联机构b;215
‑
同步轮d;216
‑
锥齿轮a;217
‑
锥齿轮b;218
‑
脚蹬;219
‑
固定支架。
20.具体实施方式
21.下面通过实施例,并结合附图,对本发明的技术方案作进一步具体的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施的限制。
22.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、
ꢀ“
相连”、
ꢀ“
连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
23.实施例,如图1
‑
12所示,一种基于脚踩的自动化升降移动梯,包括:伸缩楼梯部分1和移动升降部分2;移动升降部分2安装在伸缩楼梯部分1底部的底板上,伸缩楼梯部分1放置在地面上,通过伸缩伸缩楼梯部分1来达到想要的高度,通过控制移动升降部分2使人在梯子上也可以调整方向或者移动梯子,提高整体实用性能;
伸缩楼梯部分1包括:空心方形框101、脚踏楼梯112、踩踏升降结构、升降梯子结构;空心方形框101为中空设计,空心方形框101的内部安装有踩踏升降结构;升降梯子结构有两组,两组升降梯子结构的下端安装在空心方形框101内部,脚踏楼梯112固定安装在两组升降梯子结构中间位置的固定块上,通过踩踏升降结构带动升降梯子结构升降;移动升降部分2包括:升降挡板支撑结构、转动方向结构、脚踏移动结构;升降挡板支撑结构安装在空心方形框101内部,升降挡板支撑结构通过皮带与转动方向结构和脚踏移动结构连接起来,通过升降挡板支撑结构来控制移动梯子,通过转动方向结构来调整梯子的移动方向,通过脚踏移动结构使梯子进行移动。
24.实施例,如图5所示,踩踏升降结构包括:脚踩直板103、棘轮104、直齿条a105、脚踏方形板106、转动轴108、伺服电机109、所述的脚踩直板103滑动安装在空心方形框101内部,脚踩直板103的一端与棘轮104转动连接,棘轮104的轴与其中一个转动轴108的轴滑动连接;直齿条a105滑动安装在空心方形框101的内部,直齿条a105的上端和下端通过弹簧与空心方形框101连接,弹簧具有弹力,直齿条a105的侧面与脚踏方形板106的一端固定连接;直齿轮a107转动安装在阶梯a102侧面靠下位置的槽中,直齿轮a107和转动轴108通过皮带连接;转动轴108有两个,两个转动轴108转动安装在空心方形框101内部,两个转动轴108通过皮带连接,其中一个转动轴108的一端与固定安装在空心方形框101内的伺服电机109的轴固定连接;具体地,当使用的时候,通过人用脚推动脚踩直板103,进而推动棘轮104移动,使棘轮104的齿和脚踏方形板106的齿相互啮合,再通过人用脚反复的踩踏脚踏方形板106从而带动直齿条a105不断上下移动,进而带动棘轮104朝同一个方向转动,进而带动转动轴108转动,从而带动直齿轮a107转动,进而使梯子升起来;当想要降下来梯子的时候,通过触碰伺服电机109侧面的开关,通过伺服电机109带动转动轴108进而带动直齿轮a107转动,从而使梯子下降。
25.实施例,如图6
‑
8所示,升降梯子结构包括:阶梯a102、直齿轮a107、大直齿轮110、小直齿轮111、阶梯b113、阶梯c114、摇把115、直齿轮b116、圆形转盘117;阶梯a102由铁合金制成,阶梯a102的下端固定安装在空心方形框101内,阶梯a102的侧面靠下位置转动安装有直齿轮a107,直齿轮a107有若干个,直齿轮a107的齿可与小直齿轮111的齿啮合,阶梯a102侧面的靠上位置转动安装有大直齿轮110,大直齿轮110有若干个,大直齿轮110的齿与阶梯b113侧面的齿相互啮合,大直齿轮110前端的轴与小直齿轮111固定连接,小直齿轮111有若干个,小直齿轮111转动安装在阶梯a102侧面,小直齿轮111的轴与直齿轮a107的轴通过皮带连接,具体地,通过直齿轮a107转动带动小直齿轮111转动,进而带动大直齿轮110转动,从而带动阶梯b113移动;阶梯b113有若干个,若干个阶梯b113呈套筒形式安装,具体地,使阶梯b113侧面靠下位置的直齿轮a107和小直齿轮111啮合,进而通过小直齿轮111带动阶梯b113侧面靠下位置的直齿轮a107转动,如此反复;阶梯c114滑动安装在若干个阶梯b113的最上端,阶梯c114侧面的靠下位置转动安装有直齿轮a107,阶梯c114的侧面靠上位置转动安装有直齿轮b116, 直齿轮a107的轴与直齿轮b116的轴通过皮带连接;摇把115安装在阶梯c114的一面,摇把115的前端与圆形转盘117的轴固定连接,圆形转盘117通过皮带与直齿轮b116的轴连接;具体地,当梯子伸到合适位置的时候,人在梯子上想要降下来的时候,通过转动摇把115进而带动圆形转盘117转动,从而带动直齿轮
b116转动,进一步的带动阶梯c114侧面靠下位置的直齿轮a107转动,进而带动大直齿轮110转动进而使梯子降下来。
26.实施例,如图9
‑
12所示,升降挡板支撑结构包括:万向轮201、不规则支架202、支板203、连接支架204、直齿条b205、直齿轮c206、直齿条c207、卡扣208;万向轮201的上端与不规则支架202固定连接,不规则支架202固定安装在空心方形框101内部,万向轮201的上端板子与弹簧的一端固定连接,弹簧的一端与支板203的上端固定连接,弹簧具有拉力,通过支板203的支撑防止万向轮201移动;支板203的侧面与连接支架204固定连接,连接支架204侧面的杆上固定安装有直齿条b205,直齿条b205的齿与直齿轮c206的齿相互啮合,直齿轮c206转动安装在空心方形框101内部,直齿轮c206的齿与直齿条c207的齿相互啮合,直齿条c207的上端面与卡扣208的移动杆通过升缩杆固定连接;具体地,当人坐在脚踏楼梯112上,想要移动梯子的时候,通过按压卡扣208带动直齿条c207滑动,进而带动直齿轮c206转动,从而带动直齿条b205滑动,进一步的带动连接支架204滑动带动支板203滑动,进而可以让万向轮201正常移动或者转动。
27.转动方向结构包括:同步轮a209、串联机构a211、同步轮c212、转向盘213;同步轮a209有四个,每个同步轮a209分别与万向轮201上其中一个齿轮的轴固定连接,四个同步轮a209通过皮带连接,其中一个同步轮a209通过皮带与串联机构a211的一个皮带轮连接,串联机构a211的另一个皮带轮与同步轮c212通过皮带连接起来,同步轮c212转动安装在不规则支架202延伸出的板子上,同步轮c212的轴与转向盘213的轴固定连接,转向盘213上固定安装有圆杆;具体地,通过握住转向盘213上的圆杆带动转向盘213转动,进而带动同步轮c212转动,从而带动串联机构a211带动同步轮a209转动,进而带动万向轮201改变方向。
28.脚踏移动结构包括:同步轮b210、串联机构b214、同步轮d215、锥齿轮a216、锥齿轮b217、脚蹬218、固定支架219;同步轮b210有四个,每个同步轮b210分别与万向轮201上其中一个齿轮的轴固定连接,四个同步轮b210通过皮带连接,其中一个同步轮b210通过串联机构b214与同步轮d215连接,同步轮d215转动安装在不规则支架202中间位置的板子上,同步轮d215的轴与锥齿轮a216的轴固定连接,锥齿轮a216的齿与锥齿轮b217的齿相互啮合,锥齿轮b217转动安装在固定支架219上,锥齿轮b217两端的轴分别与两个脚蹬218固定连接,固定支架219转动安装在锥齿轮a216的轴上;具体地,当人坐在串联机构a211上,想要移动梯子的时候,通过脚放在脚蹬218上带动脚蹬218转动,从而带动锥齿轮b217转动,进而带动锥齿轮a216转动,进一步的带动同步轮d215转动,从而带动串联机构b214带动同步轮b210转动,进而带动万向轮201转动。
29.工作原理:在使用梯子的时候,通过人用脚推动脚踩直板103,进而推动棘轮104移动,使棘轮104的齿和脚踏方形板106的齿相互啮合,再通过人用脚反复的踩踏脚踏方形板106从而带动直齿条a105不断上下移动,进而带动棘轮104朝同一个方向转动,进而带动转动轴108转动,从而带动直齿轮a107转动,进而使梯子升起来,方便人工使用,提高使用性能;通过直齿轮a107转动带动小直齿轮111转动,进而带动大直齿轮110转动,从而带动阶梯b113移动,当阶梯b113移动到合适位置的时候,使阶梯b113侧面靠下位置的直齿轮
a107和小直齿轮111啮合,进而通过小直齿轮111带动阶梯b113侧面考下位置的直齿轮a107转动,如此反复,当梯子伸到合适位置的时候,人在梯子上想要降下来的时候,通过转动摇把115进而带动圆形转盘117转动,从而带动直齿轮b116转动,进一步的带动阶梯c114侧面靠下位置的直齿轮a107转动,进而带动大直齿轮110转动进而使梯子降下来;当梯子升起来的时候,人可以通过踩着脚踏楼梯112爬上去,为保证安全性,可以选择坐在脚踏楼梯112最上面的支撑板上,提高安全性能;正常情况下,通过支板203的支撑防止万向轮201移动,当人坐在脚踏楼梯112上,想要移动梯子的时候,通过按压卡扣208带动直齿条c207滑动,进而带动直齿轮c206转动,从而带动直齿条b205滑动,进一步的带动连接支架204滑动带动支板203滑动,从而使支板203不和地面接触,进而可以让万向轮201正常移动或者转动,保证梯子在平时使用的时候不会出现随意移动的情况,增加稳定性能;当人坐在脚踏楼梯112上的时候,想要调整梯子的移动方向的时候,通过握住转向盘213上的圆杆带动转向盘213转动,进而带动同步轮c212转动,从而带动串联机构a211带动同步轮a209转动,进而带动万向轮201改变方向,可以提升实用效率,方便人工使用,增强实用性能;当想要降下来梯子的时候,通过触碰伺服电机109侧面的开关,通过伺服电机109带动转动轴108进而带动直齿轮a107转动,从而使梯子下降。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。