技术特征:
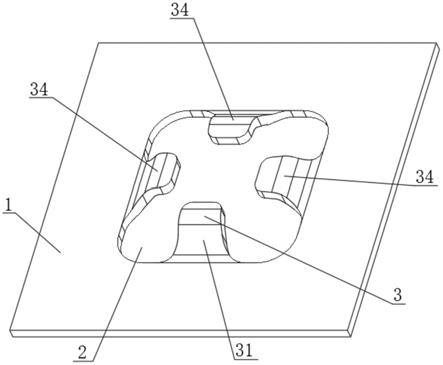
1.一种应用于外骨骼机器人的人体意识识别控制装置,包括外骨骼机器人,其特征在于,还包括:重心测量系统,所述重心测量系统设置在所述外骨骼机器人的足部构件底部;力矩传感器,所述力矩传感器设置在所述外骨骼机器人的外骨骼关节;姿态传感器,所述姿态传感器设置在所述外骨骼机器人的腰部支撑构件内侧;肌肉张力传感器,所述肌肉张力传感器设置在所述外骨骼机器人的大腿杆件的内侧;控制模块,所述重心测量系统、所述力矩传感器、所述姿态传感器和所述肌肉张力传感器均与所述控制模块电性连接;报警模块,所述报警模块与所述控制模块电性连接。2.根据权利要求1所述的一种应用于外骨骼机器人的人体意识识别控制装置,其特征在于,所述重心测量系统包括第一支撑板、第一弹性薄板、第二支撑板、第二弹性薄板、支撑柱和四个压力传感器;所述第一支撑板安装在所述足部构件底部;所述第一弹性薄板固定在所述第一支撑板的底部;所述第二支撑板位于所述第一支撑板的下方;所述第二弹性薄板固定在所述第二支撑板的顶部;所述第一弹性薄板和所述第二弹性薄板通过所述支撑柱连接为一体;四个压力传感器分别设置在所述第二支撑板顶部的四个角端。3.根据权利要求2所述的一种应用于外骨骼机器人的人体意识识别控制装置,其特征在于,所述第一支撑板通过四个预紧螺丝安装在所述足部构件底部,并且四个所述预紧螺丝的底部分别与四个所述压力传感器抵接。4.一种应用于外骨骼机器人的人体意识识别控制方法,其特征在于,包括以下步骤:1)重心测量系统对足底反力进行测量来获得重心位置,从而感应到足底重心偏移方向,并将数据传递给控制模块;同时力矩传感器检测外骨骼关节与人体之间的交互力矩,并将数据传递给控制模块,动态调节步姿和人机交互力矩;姿态传感器对用户运动姿态进行检测,并将数据传递给控制模块,通过ai算法预测用户运动意图;肌肉张力传感器采集肌肉张力参数,并将数据传递给控制模块;2)控制模块对获取数据进行整合分析来识别用户的控制意图;3)当获取的任一个数据超过或小于输入的正常数值范围时,控制模块驱动报警模块运行。
技术总结
本发明公开了一种应用于外骨骼机器人的人体意识识别控制装置及方法,包括重心测量系统、力矩传感器、姿态传感器、肌肉张力传感器、控制模块和报警模块;重心测量系统设置在外骨骼机器人的足部构件底部;力矩传感器设置在外骨骼机器人的外骨骼关节;姿态传感器设置在外骨骼机器人的腰部支撑构件内侧;肌肉张力传感器设置在外骨骼机器人的大腿杆件的内侧;控制模块,重心测量系统、力矩传感器、姿态传感器和肌肉张力传感器均与控制模块电性连接;报警模块与控制模块电性连接。本发明能够识别用户的控制意图,快速、精准的识别用户的行走意图并作出迈步响应,提升病患运动能力。提升病患运动能力。提升病患运动能力。
技术研发人员:王依兴 叶秀芬 陈尚泽
受保护的技术使用者:哈尔滨工程大学
技术研发日:2021.08.02
技术公布日:2021/11/2
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。