1.本技术涉及工件校正的领域,尤其是涉及一种用于升降机剪叉臂校正的油压机。
背景技术:
2.目前剪叉式升降机式用途最广的高空作业专用设备,它的剪叉机械结构的设置,使升降台起升有更高的稳定性,剪叉臂是剪叉结构中的重要部件,剪叉臂为长条状金属工件,在剪叉臂生产出来后,需要利用油压机对剪叉臂进行校正,以提高剪叉臂的直线度。
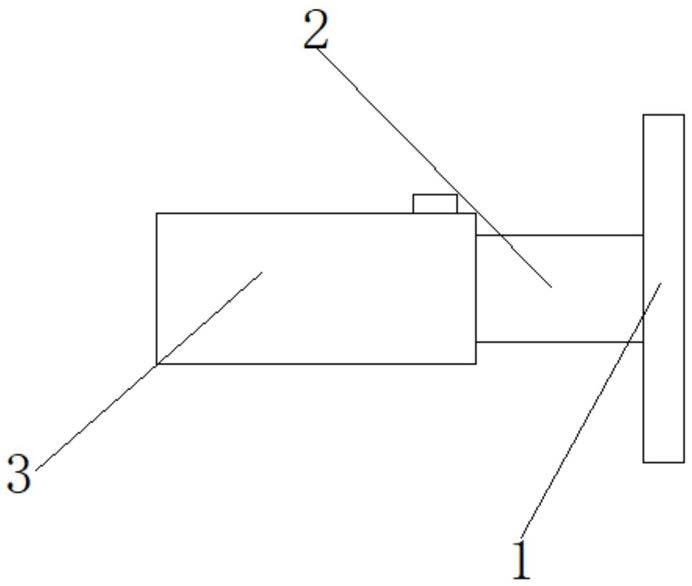
3.参照图1,一般的油压机包括机体1、压台3和油压柱2,机体1竖直设置,压台3水平设置在机体1内,压台3两端均与机体1固定连接,压台3两侧壁分别与机体1两侧壁齐平,油压柱2竖直设置机体1顶端和压台3之间,油压柱2顶端与机体1滑动连接,油压柱2底端对准压台3中间。在利用油压机对剪叉臂进行校正时,首先将剪叉臂放置在压台3顶端,反复调整剪叉臂在压台3处的位置,使剪叉臂的中心位于与油压柱2对齐,之后启动油压机,机体1带动油压柱2压向剪叉臂,将剪叉臂中间的拱起部分压正,从而实现了对剪叉臂的校正。
4.针对上述中的相关技术,发明人认为存在有以下缺陷:在调整剪叉臂中心与油压柱对准时,调整过程耗时长,导致剪叉臂的校正效率低。
技术实现要素:
5.为了提高剪叉臂的校正效率,本技术提供一种用于升降机剪叉臂校正的油压机。
6.本技术提供的一种用于升降机剪叉臂校正的油压机采用如下的技术方案:
7.一种用于升降机剪叉臂校正的油压机,包括机体、用于压正剪叉臂的油压柱和压台,压台与机体固定连接,油压柱位于机体和压台之间,油压柱一端与机体滑动连接,另一端对准压台中心,所述机体固定连接有两个加长板,两个加长板分别位于压台两侧,且两个加长板靠近油压柱的侧壁与压台靠近油压柱的侧壁齐平,两个加长板均设置有用于定位剪叉臂校正位置的定位装置。
8.通过采用上述技术方案,将剪叉臂同时放在两个加长板和压台上,两个加长板增加了对剪叉臂的支撑;然后用定位装置对剪叉臂在加长板上进行快速定位,使剪叉臂中心与油压柱对准;通过定位装置的设置,缩短了调整剪叉臂位置的时间,达到提高了剪叉臂校正效率的目的。
9.可选的,所述定位装置包括侧壁板和端板,侧壁板和端板均设置有两个,两个侧壁板和两个端板均与加长板滑动连接,在剪叉臂受定位装置定位时,两个侧壁板将剪叉臂的两侧壁夹持,两个端板将剪叉臂的两个端面夹持。
10.通过采用上述技术方案,移动两个侧壁板沿加长板相向滑动,使两个侧壁板将剪叉臂的两侧壁夹持,再移动两个端板同样沿加长板相向滑动,使两个端板将剪叉臂的两个端面夹持,从而实现了将剪叉臂的整体夹持和定位,提高了对剪叉臂定位的便捷性。
11.可选的,两个所述侧壁板均固定连接有第一块,加长板开设有第一槽,第一槽与两个第一块均滑动连接。
12.通过采用上述技术方案,在移动两个侧壁板时,两个侧壁板分别带动两个第一块沿第一槽滑动,进而实现了侧壁板与加长板之间的滑动连接,同时提高了侧壁板与加长板之间滑动连接的便捷性。
13.可选的,两个所述侧壁板均连接有双向丝杠,双向丝杠两端分别与两个侧壁板螺纹连接,双向丝杠与加长板转动连接。
14.通过采用上述技术方案,转动双向丝杠,双向丝杠带动两个侧壁板沿第一槽相向进行移动,从而实现了两个侧壁板之间的同步运动,同时提高了对移动两个侧壁板同时滑动的便捷性。
15.可选的,所述双向丝杠一端固定连接有皮带轮,皮带轮与加长板之间设置有锁死组件,锁死组件包括锁死杆、锁死孔和固定板,固定板一端与加长板固定连接,锁死孔开设于皮带轮侧壁,锁死孔设置有多个,锁死杆一端穿过固定板后插入锁死孔内,锁死孔与固定板滑动连接。
16.通过采用上述技术方案,通过转动皮带轮来带动双向丝杠转动,在双向丝杠带动两个侧壁板将剪叉臂夹持后,移动锁死杆一端穿过固定板后插入对准的锁死孔内,由于固定板的位置固定,从而实现了对皮带轮的位置进行锁死固定,提高了两个侧壁板将剪叉臂夹持时的稳定性。
17.可选的,所述锁死杆固定连接有环板,环板位于皮带轮和固定板之间,环板与固定板之间设置有弹簧,弹簧两端分别与环板和固定板固定连接。
18.通过采用上述技术方案,在需要转动皮带轮时,拉动锁死杆远离皮带轮,此时弹簧压缩,在皮带轮转动到所需位置后,松开对锁死杆的施力,弹簧回弹,弹簧带动锁死杆插入锁死孔内,对皮带轮进行再次锁死,通过弹簧的设置,缩减了移动锁死杆插入锁死孔内的施力,同时增快了对皮带轮的锁死速度。
19.可选的,两个所述端板均固定连接有气缸,两个气缸均与加长板固定连接。
20.通过采用上述技术方案,同时启动两个气缸,两个气缸分别带动两个端板沿加长板滑动,使两个端板将剪叉臂的两端面夹持,气缸为端板的移动提供动力,同时提高了端板移动的便捷性。
21.可选的,两个所述端板与剪叉臂之间均设置有压力传感器,两个压力传感器分别与两个端板固定连接,两个压力传感器与两个气缸通过电控进行连接,在两个压力传感器同时与剪叉臂抵接时,压力传感器控制两个气缸关闭。
22.通过采用上述技术方案,在两个端板将剪叉臂的两个端面夹持对剪叉臂定好位时,两个端面的压力传感器同时受压力,此时两个压力传感器控制两个气缸同时关闭,两个气缸带动两个端板远离剪叉臂,之后对剪叉臂进行校正,剪叉臂在校正后沿两个端面的方向会有延长,此时两个端板远离剪叉臂,从而减小剪叉臂对两个端板的加压及损失,对两个端板提供保护。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.通过定位装置的设置,缩短了调整剪叉臂位置的时间,达到提高了剪叉臂校正效率的目的;
25.2.通过双向丝杠的设置,实现了两个侧壁板之间的同步运动,同时提高了对移动两个侧壁板同时滑动的便捷性;
26.3.通过压力传感器的设置,控制端板及时远离剪叉臂,从而减小剪叉臂对两个端板的加压及损失,对两个端板提供保护。
附图说明
27.图1是本技术中背景技术的结构示意图;
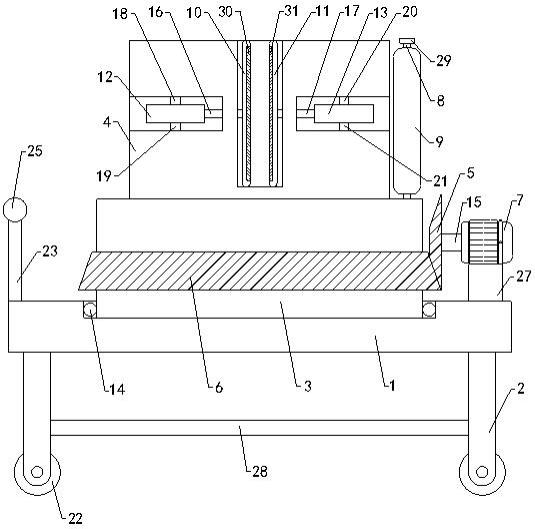
28.图2是本技术实施例中处于校正状态油压机的结构示意图;
29.图3是本技术实施例中锁死组件的结构示意图。
30.附图标记说明:1、机体;2、油压柱;3、压台;4、加长板;41、第一槽;42、第二槽;5、定位装置;51、侧壁板;511、驱动机构;5111、双向丝杠;5112、皮带轮;5113、调节把手;512、第一块;52、端板;521、气缸;522、第二块;6、支撑板;7、锁死组件;71、锁死杆;711、环板;72、锁死孔;73、固定板;74、弹簧;8、压力传感器;81、控制箱;9、剪叉臂。
具体实施方式
31.以下结合附图2
‑
3对本技术作进一步详细说明。
32.本技术实施例公开一种用于升降机剪叉臂校正的油压机。参照图2,一种用于升降机剪叉臂校正的油压机包括机体1、压台3、加长板4和油压柱2,机体1竖直设置于车间地面,压台3水平设置在机体1内,压台3两侧壁均与机体1固定连接,油压柱2竖直设置在机体1顶端与压台3之间,油压柱2与机体1滑动连接,加长板4水平设置有两个,两个加长板4分别设置在压台3沿机体1宽度方向的两侧,加长板4靠近机体1的侧壁与压台3侧壁固定连接,加长板4顶端设置有定位装置5。在使用油压机对剪叉臂9进行校正时,首先将剪叉臂9放置在加长板4和压台3的顶端,并利用定位装置5对剪叉臂9进行定位,使剪叉臂9中心与油压柱2对准,然后启动机体1,机体1带动油压柱2压向剪叉臂9的中心,从而对剪叉臂9进行校正。
33.参照图2,加长板4顶端与压台3顶端齐平,两个加长板4对称设置在压台3的两侧,两个加长板4顶端沿加长板4的宽度方向水平开设有第一槽41,第一槽41的横截面为t型,第一槽41靠近压台3,两个加长板4顶端另开设有第二槽42,第二槽42沿加长板4的长度方向水平设置,两个第二槽42分别位于两个第一槽41远离压台3的一侧,第二槽42与加长板4长度方向的两侧壁之间的距离相同。加长板4加长对剪叉臂9的支撑长度,对剪叉臂9的支撑更加稳定。
34.参照图2,定位装置5包括侧壁板51和端板52,侧壁板51平行于加长板4的长度方向侧壁,侧壁板51竖直设置有四个,每两个一组共分为两组,两组侧壁板51分别与两个第二槽42对应,两组侧壁板51分别与两个第二槽42滑动连接,两个侧壁板51与加长板4之间设置有驱动机构511,端板52平行于加长板4的宽度方向侧壁,端板52竖直设置有两个,两个端板52分别与两个第二槽42滑动连接,两个端板52相互远离的两侧壁分别固定连接有气缸521,气缸521水平设置于加长板4顶端,气缸521底端与加长板4顶端固定连接。
35.在放置剪叉臂9时,利用驱动机构511使同组的两个侧壁板51相互远离,然后移动剪叉臂9插入同组两个侧壁板51之间,并移动剪叉臂9使剪叉臂9位于两个端板52之间,然后利用驱动机构511带动同组的两个侧壁板51相向运动,直到两个侧壁板51分别将剪叉臂9的两侧壁抵接,两个侧壁板51将剪叉臂9夹持,同时启动两个气缸521,使两个气缸521带动两个端板52沿第二槽42向靠近剪叉臂9的方向移动,直到两个端板52远离两个气缸521的侧壁
均与剪叉臂9的两端面抵接,此时剪叉臂9中心与油压柱2正好对准,从而完成了对剪叉臂9的精准定位,缩短了调整剪叉臂9位置的时间,达到提高了剪叉臂9校正效率的目的。
36.参照图2,侧壁板51与第一槽41之间设置有第一块512,第一块512水平设置在侧壁板51底端,第一块512为t型块,第一块512顶端与侧壁板51底端固定连接,第一块512底端插入第一槽41内,且第一块512与第一槽41滑动连接。在侧壁板51在加长板4顶端移动时,侧壁板51带动第一块512沿第一槽41滑动,进而对侧壁板51的移动进行导向。
37.参照图2,驱动机构511包括双向丝杠5111、皮带轮5112和调节把手5113,双向丝杠5111沿加长板4的宽度方向水平设置有两个,两个双向丝杠5111与两组侧壁板51对应,同组的两个侧壁板51分别套设在双向丝杠5111的两端侧壁处,且同组的两个侧壁板51分别与双向丝杠5111的两端螺纹连接,同组的两个侧壁板51相互远离的两侧均竖直设置有支撑板6,支撑板6底端与加长板4顶端固定连接,支撑板6也套设在双向丝杠5111的两端外侧,且支撑板6与双向丝杠5111转动连接,皮带轮5112竖直设置有两个,两个皮带轮5112分别与两个双向丝杠5111同侧的一端固定连接,两个皮带轮5112之间通过皮带进行传动,一个皮带轮5112远离加长板4的侧壁与调节把手5113固定连接,另一个皮带轮5112与加长板4之间设置有锁死组件7。
38.在剪叉臂9放置完成后,转动调节把手5113,调节把手5113带动远离锁死组件7的皮带轮5112转动,通过皮带的传动时两个皮带轮5112同步进行转动,两个皮带轮5112分别带动两个双向丝杠5111同步进行转动,两个双向丝杠5111带动两组侧壁板51将剪叉臂9夹持,之后利用锁死组件7将皮带轮5112的位置锁死固定,进而将两组侧壁板51将剪叉臂9夹持的状态进行固定,使两组侧壁板51将剪叉臂9夹持地更加稳定。
39.参照图2和图3,锁死组件7包括锁死杆71、锁死孔72、固定板73和弹簧74,固定板73水平设置在皮带轮5112与加长板4之间,固定板73靠近加长板4的侧壁与支撑板6远离侧壁板51的侧壁固定连接,固定板73顶端向靠近皮带轮5112的方向弯折,固定板73顶端位于皮带轮5112远离支撑板6一侧,锁死孔72水平设置于皮带轮5112远离支撑板6的侧壁处,锁死孔72沿周向均匀设置有多个,锁死杆71一端穿过固定板73顶端后又插入锁死孔72内,锁死杆71与固定板73顶端滑动连接,锁死杆71外侧竖直套设有环板711,环板711位于固定板73顶端和皮带轮5112之间,环板711内侧壁与锁死杆71外侧壁固定连接,弹簧74设置在环板711与固定板73顶端之间,弹簧74两端分别与环板711远离皮带轮5112的侧壁和固定板73顶端靠近皮带轮5112的侧壁固定连接。
40.在两组侧壁板51的位置进行调节前,对锁死杆71远离皮带轮5112的一端施拉力,使锁死杆71远离锁死孔72,锁死杆71带动环板711向靠近固定板73顶端的方向移动,环板711带动弹簧74压缩,此时皮带轮5112解除了被锁死的状态;在两组侧壁板51将剪叉臂9夹持后,松开对锁死杆71的施力,弹簧74回弹带动环板711远离固定板73,环板711带动锁死杆71重新插入锁死孔72内,锁死杆71靠近皮带轮5112的一端与锁死孔72底壁抵接,进而实现了对皮带轮5112位置的固定。
41.参照图2,端板52与第二槽42之间设置有第二块522,第二块522水平设置在端板52底端,第二块522为t型块,第二块522顶端与端板52底端固定连接,第二块522底端插入第二槽42内,且第二块522与第二槽42滑动连接。在端板52在加长板4顶端移动时,端板52带动第二块522沿第二槽42滑动,进而对端板52的移动进行导向。
42.参照图2和图3,两个端板52相互靠近的侧壁处均竖直设置有压力传感器8,压力传感器8与端板52远离气缸521的侧壁固定连接,两个压力传感器8与两个气缸521之间设置有控制箱81,控制箱81竖直设置在加长板4远离锁死杆71的侧壁处,控制箱81与加长板4侧壁固定连接,且控制箱81与两个压力传感器8与两个气缸521均通过电控线进行连接。
43.在气缸521带动两个端板52分别靠近剪叉臂9的两个端面处时,端板52带的压力传感器8同步进行移动,直到两个压力传感器8与剪叉臂9的两个端面均抵接时,此时两个压力传感器8通过控制箱81来控制两个气缸521同时进行关闭,两个气缸521带动两个端板52均远离剪叉臂9,之后进行剪叉臂9的校正,以防剪叉臂9在校正时对两个端板52造成挤压,减小了对端板52和气缸521的损伤。
44.本技术实施例一种用于升降机剪叉臂校正的油压机的实施原理为:在使用油压机对剪叉臂9进行校正时,首先将剪叉臂9放置在两个加长板4和压板的顶端,之后利用驱动机构511来驱动两组侧壁板51将剪叉臂9的两侧壁夹持,同时启动两个气缸521,两个气缸521带动两个端板52将剪叉臂9的两端端面夹持,从四个方向对剪叉臂9进行定位,此时剪叉臂9中心正好与油压柱2对准,然后启动机体1,机体1驱动油压柱2压向剪叉臂9,进而将剪叉臂9中心压直,从而完成了对剪叉臂9的校正。
45.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。