1.本发明涉及按摩机械手领域,尤其是一种仿形机械手。
背景技术:
2.现有的按摩椅包括按摩椅骨架和按摩机械手,按摩椅骨架上设有导轨,按摩机械手包括安装座,安装座可沿导轨上下滑移,安装座上安装有对人体进行按摩的按摩组件、驱动按摩组件进行揉捏的揉捏组件和驱动按摩组件进行敲击的敲击组件,安装座与导轨之间设有驱动安装座沿导轨移动的行走组件。
3.按摩组件包括左摆臂和右摆臂,左摆臂上设置有左按摩件,左摆臂上设置有右按摩件,左摆臂和右摆臂在揉捏组件或敲击组件的带动下使得左按摩件和右按摩件进行揉捏和敲击动作,因其左右摆臂的摆弧呈“双凸”弧形,故与人体背部相抵柔刮时,也就不可避免地出现人体上下起伏过大,且背部两颊中心处受力过大的现象,像这样的按摩形式,对老年人或平躺、倒置按摩的用户来说,就不太实用或使用的舒适性较差,以及尚存有潜在危害性风险等,进一步地该结构机械手还不能实现定点敲击的功能。
技术实现要素:
4.本发明克服了现有技术的不足,提供了一种仿形机械手,其上左摆臂和右摆臂能够实现“双凹形摆动”,针对人体背部两侧略有“外凸”的结构,其能实现左按摩件和右按摩件沿人体背部轮廓运动,更加舒适。
5.为了实现上述目的,本发明采用的技术方案是:一种仿形机械手,包括机座、按摩组件和敲击传动组件,按摩组件包括左摆臂和右摆臂,左摆臂上设置有左按摩件,右摆臂上设置有右按摩件,敲击传动组件包括敲击轴,敲击轴转动设置在机座上,敲击轴可带动左按摩件和右按摩件做敲击动作,所述机座上转动设置有曲轴,曲轴与敲击轴相互平行,左摆臂和右摆臂分别球铰在曲轴上,还包括有带动左摆臂和右摆臂实现双凹形摆动的驱动装置,驱动装置包括左摆动轴、右摆动轴,左螺旋套、右螺旋套、左拉杆和右拉杆,左螺旋套和右螺旋套沿敲击轴的轴向导向滑移设置在机座上,左摆动轴和右摆动轴沿垂直于敲击轴的轴向摆动设置在机座上,左摆动轴的端部与左摆臂远离左按摩件的端部铰接,左拉杆的一端与左摆动轴铰接,左拉杆的另一端与左螺旋套铰接,右摆动轴的端部与右摆臂远离右按摩件的端部铰接,右拉杆的一端与右摆动轴铰接,右拉杆的另一端与右螺旋套铰接,驱动装置还包括有带动左螺旋套和右螺旋套相向或相背移动的驱动结构。
6.通过采用上述方案,按摩件可为按摩头或按摩轮的结构,敲击轴可由外部电机配合转动,从而带动左按摩件和右按摩件做敲击动作,左螺旋套和右螺旋套在驱动组件的带动下进行相向移动时,可带动左摆动轴与左摆臂连接的一端以及右摆动轴与右摆臂连接的一端相背移动,从而带动左按摩件和右按摩件相向移动;左螺旋套和右螺旋套在驱动组件的带动下进行相背移动时,可带动左摆动轴与左摆臂连接的一端以及右摆动轴与右摆臂连接的一端相向移动,从而带动左按摩件和右按摩件相背移动,由于左摆臂和右摆臂分别球
铰在曲轴上,因此左螺旋套和右螺旋套往复相向或相背移动,可带动左摆臂和右摆臂能实现“双凹形摆动,针对人体背部两侧略有“外凸”的结构,其能实现左按摩件和右按摩件沿人体背部轮廓运动,更加舒适,当背部只需要定点按摩时,左螺旋套和右螺旋套停止移动,只需带动敲击轴,可实现背部定点敲击动作。
7.本发明的进一步设置是:所述驱动结构包括丝杆,丝杆转动设置在机座上,丝杆与敲击轴相互平行,曲轴位于丝杆和敲击轴之间,丝杆上设置有两段旋向相反的螺纹段,左螺旋套和右螺旋套分别外套在丝杆上,左螺旋套和右螺旋套分别与各自对应的螺纹段螺纹配合,转动丝杆可带动左螺旋套和右螺旋套相向或相背移动。
8.通过采用上述方案,机座上设置有导向杆,导向杆沿敲击轴的轴向设置,左螺旋套和右螺旋套分别与导向杆导向滑移配合,左螺旋套和右螺旋套分别与丝杆的两个螺纹段配合,外部驱动电机可带动丝杆转动,丝杆可带动左螺旋套和右螺旋套相向或相背移动,由于螺纹配合,丝杆不转动的话,左螺旋套和右螺旋套能够一直保持当前位置,此时驱动敲击轴可实现定点敲击动作,结构简单,设计合理。
9.本发明的进一步设置是:所述敲击轴包括左敲击轴和右敲击轴,左敲击轴和右敲击轴同轴向设置,左敲击轴带动左按摩件做敲击动作,右敲击轴带动右按摩件做敲击动作,左敲击轴和右敲击轴通过离合器连接,离合器可实现左按摩件和右按摩件同步敲击或异步敲击。
10.通过采用上述方案,离合器可实现左按摩件和右按摩件同步敲击,或90
°‑
120
°
交错敲击动作。
11.本发明的进一步设置是:还包括有安装架和摆杆,曲轴的两端分别穿过机座并转动设置在安装架上,摆杆的一端铰接设置在曲轴上,摆杆与机座联动连接,机座可随摆杆一起绕曲轴转动,所述安装架上设置有驱动摆杆绕曲轴转动的控制结构。
12.通过采用上述方案,导向杆贯穿摆杆设置,因此摆杆转动可带动机架机座一起沿曲轴转动,控制结构包括设置在摆杆上的齿条以及转动设在安装架上的驱动齿轮,驱动齿轮与齿条相咬合,由外部驱动电机带动驱动齿轮转动,可带动摆杆和机座沿曲轴转动,实现左按摩件和右按摩件向外翻转或向内翻转,更加贴合人体按摩。
13.本发明的进一步设置是:所述左按摩件通过左轮架安装在左摆臂上,左轮架转动设置在左摆臂上,左按摩件设置在左轮架的端部,左敲击轴带动左轮架转动,左轮架与左摆臂之间设置有左弹性缓冲件,所述右按摩件通过右轮架安装在右摆臂上,右轮架转动设置在右摆臂上,右按摩件设置在右轮架的端部,右敲击轴带动右轮架转动,右轮架与右摆臂之间设置有右弹性缓冲件。
14.通过采用上述方案,左弹性缓冲件为第一卷簧,右弹性缓冲件为第二卷簧,由于人体背部非标准“双凹”圆弧轮廓,左轮架和右轮架能够在按摩的时候进行摆动,可避免对人体的硬性冲击,更加舒适。
15.本发明的进一步设置是:所述曲轴的中间位置还套设有托轮架,托轮架的端部转动设置有脊椎托轮,所述曲轴的中间位置还设置有定位套,托轮架转动设置在定位套上,托轮架与定位套之间设置有托轮弹性缓冲件。
16.通过采用上述方案,由于机械手两摆臂的按摩件因必须保持20mm安全间距,脊椎托轮可正好弥补空白按摩区域,该脊椎托轮压迫脊椎骨两侧,正好料理
‘
足太阳膀胱经’,并
对
‘
督脉’进行梳理,故该料理非常使人感觉舒服、惬意,弹性缓冲件为第三卷簧的结构,脊椎托轮的支撑力也就具有了可调性,不会导致强力的施加而导致对人体的伤害,脊椎托轮能为机械手肩部探测提供
‘
人体已靠入’的判定条件基础,从而为肩部探测提供可靠的前提条件。
17.本发明的进一步设置是:所述左敲击轴和右敲击轴的端部分别设置有左偏心部和右偏心部,左偏心部和右偏心部随左敲击轴和右敲击轴的主体分别做偏心运动,左敲击轴的左偏心部外套有左敲击轴承座,左敲击轴承座上铰接设置有左敲击杆,左敲击杆的端部与左轮架远离左按摩件的端部球铰连接,右敲击轴的右偏心部外套有右敲击轴承座,右敲击轴承座上铰接设置有右敲击杆,右敲击杆的端部与右轮架远离右按摩件的端部球铰连接。
18.通过采用上述方案,左敲击杆包括第一杆部以及设置在第一杆部一端的第一球头部,左敲击杆的第一杆部铰接设置在左敲击轴承座上,左轮架上设置有供左敲击杆的第一球头部插设的第一球形腔,所述右敲击杆包括第二杆部以及设置在第二杆部一端的第二球头部,右敲击杆的第二杆部铰接设置在右敲击轴承座上,右轮架上设置有供右敲击杆的第二球头部插设的第二球形腔,左敲击杆和右敲击杆的结构设计合理,可避免出现锁死的情况,结构简单。
19.本发明的进一步设置是:所述曲轴在对应左摆臂处固定设置有第一球部,左摆臂上设置有与第一球部相适配的第一球窝槽,第一球部置于第一球窝槽处,所述曲轴在对应右摆臂处固定设置有第二球部,右摆臂上设置有与第二球部相适配的第二球窝槽,第二球部置于第二球窝槽处。
20.通过采用上述方案,第一球部与第一球窝槽配合以及第二球部与第二球窝槽配合,不会影响丝杆带动左摆臂和右摆臂进行摆动,结构简单,设计合理。
21.本发明的进一步设置是:所述离合器为气动式离合器,气动式离合器包括壳体、旋轨轴、角旋移动轴和气囊,旋轨轴转动设置在壳体内,所述角旋移动轴周向转动、轴向滑移设置在壳体内,旋轨轴上设置有第一旋轨,角旋移动轴外套于旋轨轴,旋轨轴与角旋移动轴之间设置有第一压力扭簧,气囊充放气,可带动角旋移动轴沿旋轨轴的第一旋轨移动并转动一定的角度,旋轨轴与左敲击轴或右敲击轴联动连接,与之对应的角旋移动轴与右敲击轴或左敲击轴联动连接。
22.通过采用上述方案,只需控制对气囊的充气或放气,即可实现左按摩件和右按摩件的同步敲击或是90
°‑
120
°
交错敲击动作,结构简单,控制方便。
23.本发明的更进一步设置是:所述离合器为电磁式离合器,电磁式离合器包括外罩、电磁线圈、电磁吸盘、主动轴和从动轴,外罩与主动轴固定连接,电磁线圈定位安装在外罩内,电磁吸盘与从动轴固定连接,从动轴外套于主动轴,主动轴上设置有第二旋轨,主动轴与从动轴之间设置有第二压力扭簧,电磁线圈通断电,可带动从动轴沿主动轴的第二旋轨移动并转动一定的角度,主动轴与左敲击轴或右敲击轴联动连接,与之对应的从动轴与右敲击轴或左敲击轴联动连接。
24.通过采用上述方案,只需控制对电磁线圈的通电或断电,即可实现左按摩件和右按摩件的同步敲击或是90
°‑
120
°
交错敲击动作,结构简单,控制方便。
25.下面结合附图对本发明作进一步描述。
附图说明
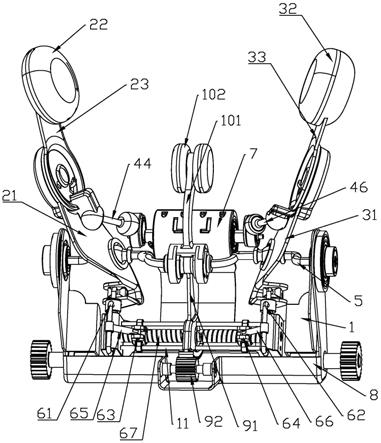
26.图1为本发明实施例的整体结构示意图;图2为机座上各部件的安装结构示意图;图3为驱动装置的结构示意图;图4为敲击传动组件、左轮架和右轮架的配合结构示意图;图5为左摆臂和右摆臂的结构示意图;图6为曲轴的结构示意图;图7为气动式离合器的剖面结构示意图;图8为气动式离合器的爆炸结构示意图;图9为电磁离合器的剖面结构示意图;图10为主动轴和从动轴的配合结构示意图;图11为双凹形摆动的圆心前置法原理图;图12为双凹形摆动的另一种摆臂联动成形法原理图;图13为丝杆的另一种结构示意图。
具体实施方式
27.在本发明的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或原件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
28.如图1
‑
图13所示,一种仿形机械手,包括机座1、按摩组件和敲击传动组件,按摩组件包括左摆臂21和右摆臂31,左摆臂21上设置有左按摩件22,右摆臂31上设置有右按摩件32,左按摩件22和右按摩件32为按摩轮的结构,左按摩件22和右按摩件32分别转动设置在左摆臂21和右摆臂31的端部,当然也可以为按摩头的结构,敲击传动组件包括敲击轴,敲击轴转动设置在机座1上,敲击轴可带动左按摩件22和右按摩件32做敲击动作,机座1上转动设置有曲轴5,曲轴5与敲击轴相互平行,左摆臂21和右摆臂31分别球铰在曲轴5上,还包括有带动左摆臂21和右摆臂31实现双凹形摆动的驱动装置,驱动装置包括左摆动轴61、右摆动轴62,左螺旋套63、右螺旋套64、左拉杆65和右拉杆66,左螺旋套63和右螺旋套64沿敲击轴的轴向导向滑移设置在机座1上,左摆动轴61和右摆动轴62沿垂直于敲击轴的轴向摆动设置在机座1上,左摆动轴61的端部与左摆臂21远离左按摩件22的端部铰接,左拉杆65的一端与左摆动轴61铰接,左拉杆65的另一端与左螺旋套63铰接,右摆动轴62的端部与右摆臂31远离右按摩件32的端部铰接,右拉杆66的一端与右摆动轴62铰接,右拉杆66的另一端与右螺旋套64铰接,驱动装置还包括有带动左螺旋套63和右螺旋套64相向或相背移动的驱动结构。
29.在本实施例中,机座1上设置有导向杆11,导向杆11沿敲击轴的轴向设置,左螺旋套63和右螺旋套64分别与导向杆11导向滑移配合,驱动结构包括丝杆67,丝杆67转动设置在机座1上,丝杆67与敲击轴相互平行,曲轴5位于丝杆67和敲击轴之间,丝杆67上设置有两段旋向相反的螺纹段671,左螺旋套63和右螺旋套64分别外套在丝杆67上,左螺旋套63和右螺旋套64分别与各自对应的螺纹段671螺纹配合,转动丝杆67可带动左螺旋套63和右螺旋
套64相向或相背移动。如图13所示,当然该丝杆也可采用封闭双向回程螺纹结构,这样驱动电机只需驱动丝杆往一个方向进行转动,避免了驱动电机因正反转切换造成冲击。
30.在本实施例中,敲击轴包括左敲击轴41和右敲击轴42,左敲击轴41和右敲击轴42同轴向设置,左敲击轴41带动左按摩件22做敲击动作,右敲击轴42带动右按摩件32做敲击动作,左敲击轴41和右敲击轴42通过离合器7连接,离合器7可实现左按摩件22和右按摩件32同步敲击或异步敲击。
31.在本实施例中,还包括有安装架8和摆杆91,曲轴5的两端分别穿过机座1并转动设置在安装架8上,摆杆91的一端铰接设置在曲轴5的中间处,导向杆11贯穿摆杆91设置,摆杆91转动可带动机架1机座一起沿曲轴5转动,安装架8上设置有驱动摆杆91绕曲轴5转动的控制结构,控制结构包括设置在摆杆91上的齿条911以及转动设在安装架8上的驱动齿轮92,驱动齿轮92与齿条911相咬合,由外部驱动电机带动驱动齿轮92转动,可带动摆杆91和机座1沿曲轴5转动,实现左按摩件22和右按摩件32向外翻转或向内翻转,更加贴合人体按摩。
32.在本实施例中,左按摩件22通过左轮架23安装在左摆臂21上,左轮架23转动设置在左摆臂21上,左按摩件22设置在左轮架23的端部,左敲击轴41带动左轮架23转动,左轮架23与左摆臂21之间设置有左弹性缓冲件,左弹性缓冲件为第一卷簧24,右按摩件32通过右轮架33安装在右摆臂31上,右轮架33转动设置在右摆臂31上,右按摩件32设置在右轮架33的端部,右敲击轴42带动右轮架33转动,右轮架33与右摆臂31之间设置有右弹性缓冲件,右弹性缓冲件为第二卷簧34。
33.在本实施例中,曲轴5的中间位置还套设有托轮架101,托轮架101的端部转动设置有脊椎托轮102,曲轴5的中间位置还设置有定位套103,托轮架101转动设置在定位套103上,托轮架101与定位套103之间设置有托轮弹性缓冲件,托轮弹性缓冲件为第三卷簧104。
34.在本实施例中,左敲击轴41和右敲击轴42的端部分别设置有左偏心部和右偏心部,左偏心部和右偏心部随左敲击轴41和右敲击轴42的主体分别做偏心运动,左敲击轴41的左偏心部外套有左敲击轴承座43,左敲击轴承座43上铰接设置有左敲击杆44,左敲击杆44的端部与左轮架23远离左按摩件22的端部球铰连接,右敲击轴42的右偏心部外套有右敲击轴承座45,右敲击轴承座45上铰接设置有右敲击杆46,右敲击杆46的端部与右轮架33远离右按摩件32的端部球铰连接。
35.在本实施例中,曲轴5在对应左摆臂21处固定设置有第一球部51,左摆臂21上设置有与第一球部51相适配的第一球窝槽211,第一球部51置于第一球窝槽211处,曲轴5在对应右摆臂31处固定设置有第二球部52,右摆臂31上设置有与第二球部52相适配的第二球窝槽311,第二球部52置于第二球窝槽311处。
36.在本实施例中,离合器7为气动式离合器,气动式离合器包括壳体71、旋轨轴72、角旋移动轴73和气囊74,旋轨轴72转动设置在壳体71内,角旋移动轴73周向转动、轴向滑移设置在壳体71内,旋轨轴72上设置有第一旋轨,角旋移动轴73外套于旋轨轴72,旋轨轴72与角旋移动轴73之间设置有第一压力扭簧75,气囊74充放气,可带动角旋移动轴73沿旋轨轴72的第一旋轨移动并转动一定的角度,旋轨轴72与左敲击轴41或右敲击轴42联动连接,与之对应的角旋移动轴73与右敲击轴42或左敲击轴41联动连接。
37.离合器的另一种设置方式:离合器为电磁式离合器,电磁式离合器包括外罩71’、电磁线圈72’、电磁吸盘73’、主动轴74’和从动轴75’,外罩71’与主动轴74’固定连接,电磁
线圈72’定位安装在外罩71’内,电磁吸盘73’与从动轴75’固定连接,从动轴75’外套于主动轴74’,主动轴74’上设置有第二旋轨,主动轴74’与从动轴75’之间设置有第二压力扭簧76’,电磁线圈72’通断电,可带动从动轴75’沿主动轴74’的第二旋轨移动并转动一定的角度,主动轴74’与左敲击轴41或右敲击轴42联动连接,与之对应的从动轴75’与右敲击轴42或左敲击轴41联动连接。
38.在本实施例中,该机械手的蟹形结构,在按摩宽度与目前现行机械手一样的情况下,可减少机芯宽度;或该机械手的蟹形结构,在取机芯与目前现行机械手一样宽的情况下,则按摩宽度得以加大,有利于“拉”背动作的完成,且该“拉”背动作是独到的。
39.如图11所示:双凹形摆动采用圆心前置偏转法,机构的自由度计算:由于a、b为球铰链,故该机构为空间运动机构。那么b、a约束3个水平移动自由度,故p3=2,c为复合铰链,约束3个水平移动与2个旋转方向,故p5=1,因2个运动杆,故该空间机构自由度按f计算
[2]
,并将其展开为:f = 6n
‑
5p5‑
4 p4‑
3p3‑
2 p2‑ꢀ
p1,因p
4 = p
2 = p
1 =0,故可得:f = 6*2
‑
5*1
‑
3*2=1故可确定图11机构有惟一的运动轨迹存在,即:输入端i有旋摆运动时,输出端o有唯一的运动形式输出。经分析i运动只能为凸弧摆动,则o以凹弧摆动形式输出,这样即满足要求。
40.以上实施例,只是本发明优选地具体实施例,本领域技术人员在本发明技术方案范围内进行的通常变化和替换都包含在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。