1.本发明涉及一种车辆后方警告系统及其控制方法,更具体地,涉及一种用于检测主车辆的后方或后侧方的目标车辆并向乘客警告碰撞可能性的系统及其控制方法。
背景技术:
2.后方警报设备是当有可能与在运动中的车辆的后侧方检测到的物体发生碰撞时向驾驶员发出警报的设备。
3.后方警报设备可以包括盲点检测(blind spot detection,bsd)系统,其检测并警告驾驶员存在于车辆后方警报区域中的物体,以及车道改变辅助(lane change assist,lca)系统,其确定并警告驾驶员车辆改变车道与从后方快速接近主车辆的目标车辆之间发生碰撞的可能性。
4.这种车辆后方警告系统示出了当目标车辆远离或朝向主车辆行驶时,目标车辆移出和移入碰撞警告范围。
5.此时,由检测传感器检测到的目标车辆的位置与后方碰撞警告范围的位置之间的差异会引起误差,这需要技术对其进行控制。
6.上面作为技术背景描述的内容仅是为了更好地理解本发明的背景,而不应视为承认它们对应于相关领域的普通技术人员已经知道的现有技术。
技术实现要素:
7.提出本发明以解决这样的问题,并旨在通过减小目标车辆离开主车辆所检测到的后方碰撞警告范围时的碰撞警告范围来减少车辆后方碰撞警告中的误差。
8.根据本发明的车辆后方警告系统包括:检测单元,其被配置为检测目标车辆的位置;估计单元,其被配置为基于检测到的该目标车辆的位置来估计该目标车辆的行驶方向;以及设定单元,其被设置为设定主车辆的碰撞警告范围,并基于估计的该目标车辆的行驶方向来调整该碰撞警告范围。
9.该检测单元可以连接至位于该主车辆的后部的雷达传感器,并且被配置为检测位于该主车辆的后方或侧方的该目标车辆的位置。
10.该碰撞警告范围可以在相对于该主车辆在横向方向上彼此间隔开的第一边界和第二边界之间延伸,并且该设定单元可以被配置为基于估计的该目标车辆的行驶方向来调整该第一边界或该第二边界。
11.该估计单元可以进一步被配置为估计该目标车辆与该主车辆之间的横向距离,并且该设定单元可以进一步被配置为当估计的该目标车辆与该主车辆之间的该横向距离增加时,将该第二边界调整为更靠近该主车辆。
12.该估计单元可以进一步被配置为估计该目标车辆与该主车辆之间的横向距离,并且该设定单元可以被配置为当估计的该目标车辆和该主车辆之间的该横向距离减小时,将该第一边界调整为更远离该主车辆。
13.计算单元可以被配置为基于检测到的该目标车辆的位置来计算该主车辆与该目标车辆之间的横向距离,并且设定单元可以进一步被配置为将计算出的该主车辆和该目标车辆之间的该横向距离与预定距离进行比较,并基于计算出的该横向距离与该预定距离之间的比较结果来调整该碰撞警告范围。
14.该设定单元还可以被配置为当计算出的该目标车辆与该主车辆之间的该横向距离小于该第一边界或大于该第二边界时,将该第一边界调整为更靠近该主车辆,并且将该第二边界调整为更远离该主车辆。
15.该设定单元还可以被配置为当计算出的该目标车辆与该主车辆之间的该横向距离在该第一边界和该第二边界之间时,将该第二边界调整为更远离该主车辆,并且将该第一边界调整为更靠近该主车辆。
16.该设定单元还可以被配置为当估计的该目标车辆的该行驶方向指示该目标车辆移动远离该主车辆并且计算出的该目标车辆与该主车辆之间的该横向距离等于或大于第一距离时,将该第二边界调整为更靠近该主车辆。
17.该设定单元还可以被配置为当估计的该目标车辆的行驶方向指示该目标车辆移动靠近该主车辆并且计算出的该目标车辆与该主车辆之间的该横向距离等于或小于第二距离时,将该第一边界调整为更远离该主车辆。
18.根据本发明实施例的用于提供车辆后方警告的方法包括:检测目标车辆的位置;基于检测到的该目标车辆的位置来估计该目标车辆的行驶方向;以及设定主车辆的碰撞警告范围,并基于估计的该目标车辆的行驶方向来调整该碰撞警告范围。
19.该检测目标车辆的位置可以包括:使用位于该主车辆的后部的雷达传感器,检测位于该主车辆的后方或侧方的该目标车辆的位置。
20.该碰撞警告范围可以在相对于该主车辆在横向方向上彼此间隔开的第一边界和第二边界之间延伸,并且该设定该碰撞警告范围包括基于估计的所述目标车辆的行驶方向来调整该第一边界或该第二边界。
21.该设定该碰撞警告范围可以包括:当该目标车辆与该主车辆之间的横向距离增加时,将该第二边界调整为更靠近该主车辆。
22.当该目标车辆与该主车辆之间的横向距离减小时,将该第一边界调整为更远离该主车辆。
23.基于检测到的该目标车辆的位置来计算该主车辆与该目标车辆之间的横向距离,将计算出的该主车辆与该目标车辆之间的该横向距离与预定距离进行比较,以及基于计算出的横向距离和该预定距离之间的比较结果来调整该碰撞警告范围。
24.该调整该碰撞警告范围可以包括:当计算出的该目标车辆与该主车辆之间的该横向距离小于该第一边界或大于该第二边界时,将该第一边界调整为更靠近该主车辆,并且将该第二边界调整为更远离该主车辆。
25.该调整该碰撞警告范围可以包括:当计算出的该目标车辆与该主车辆之间的该横向距离在该第一边界和该第二边界之间时,将该第二边界调整为更远离该主车辆,并且将该第一边界调整为更靠近该主车辆。
26.该调整该碰撞警告范围可以包括:当估计的该目标车辆的行驶方向指示该目标车辆移动远离该主车辆并且计算出的该目标车辆与该主车辆之间的该横向距离等于或大于
预定的第一距离时,将该第二边界调整为更靠近该主车辆。
27.该调整该碰撞警告范围可以包括:当估计的该目标车辆的行驶方向指示该目标车辆移动靠近该主车辆并且计算出的该目标车辆与该主车辆之间的该横向距离等于或小于预定的第二距离时,将该第一边界调整为更远离该主车辆。
28.根据本发明的车辆后方警告系统具有当目标车辆离开碰撞警告范围时减小碰撞警告范围的效果,从而提高了检测偏离碰撞警告范围的目标车辆的准确性。
附图说明
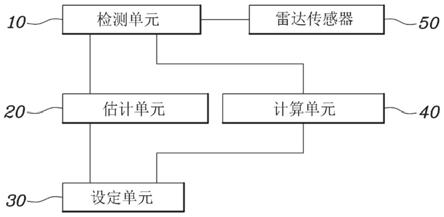
29.图1是示出根据本发明实施例的车辆后方警告系统的配置的视图。
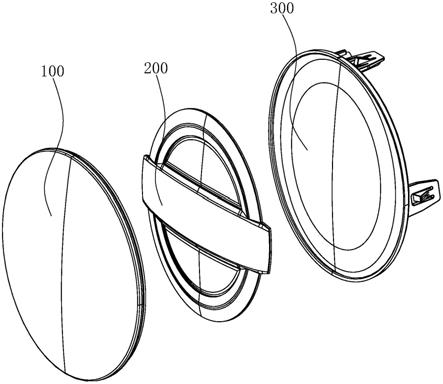
30.图2是示出根据本发明的实施例的车辆后方警告系统的示例的视图。
31.图3是示出根据本发明的实施例的车辆后方警告系统中的与目标车辆的位置相对应的第一边界和第二边界的位置的视图。
32.图4是示出根据本发明的实施例的车辆后方警告方法的流程图。
具体实施方式
33.仅出于描述根据本发明的实施例的目的,通过示例的方式给出了在本说明书或申请中公开的本发明的实施例的具体结构或功能描述,并且可以以各种形式实现根据本发明的实施例,示出的实施例不应该被理解为限于本说明书或申请中描述的实施例。
34.由于根据本发明的实施例可以以各种方式修改并且具有各种形式,因此将在附图中示出并且在本说明书或申请中详细描述特定的实施例。然而,这并不旨在将根据本发明的概念的实施例限制为特定的公开形式,而应被解释为包括本发明的精神和技术范围内包括的所有修改等同和替代。
35.诸如第一和/或第二的术语可以用于描述各种组件,但是这些组件不应受到这些术语的限制。这些术语仅用于将一个组件与其他组件区分开的目的。例如,在不脱离根据本发明的概念的权利的范围的情况下,第一组件可以被称为第二组件,并且类似地,第二组件也可以被称为第一组件。
36.当一个组件被称为“连接”或“耦合”到另一个组件时,它可以直接连接或耦合到另一个组件,但是应该理解,在它们之间可以存在其他组件。另一方面,当一个组件被称为“直接连接”或“直接耦合”到另一个组件时,应理解为在它们之间没有其他组件。应当以相同的方式解释描述诸如“在...之间”和“恰好在...之间”或“与...相邻”以及“直接与...相邻”之类的组件之间的关系的其他表达。
37.本说明书中使用的术语仅用于描述特定的实施例,而无意于限制本发明。除非上下文另外明确指出,否则单数表达包括复数表达。在本说明书中,诸如“包括”或“具有”之类的术语旨在指定所实现的特征、数字、步骤、动作、组件、部件或其组合的存在,并且不应理解为事先排除一个或多个其他特征、数字、步骤、动作、组件、部件或其组合的存在或附加的可能性。
38.除非另有定义,否则本文所用的所有术语,包括技术术语或科学术语,具有与本发明所属领域的普通技术人员通常所理解的含义相同的含义。诸如在常用字典中定义的术语应被解释为具有与相关技术上下文中的含义一致的含义,并且除非在本说明书中明确定
义,否则不应被解释为理想的或过于正式的含义。
39.在下文中,将通过参考附图描述本发明的优选实施例来详细描述本发明。各图中所示的相同附图标记表示相同的构件。
40.被配置为控制车辆的各个部件的操作的算法或被配置为存储与用于再现该算法的软件命令有关的数据的非易失性存储器(未示出)以及存储在存储器中的数据可以用于通过被配置为执行以下将描述的操作的处理器来实现根据本发明的示例性实施例的控制单元。在此,存储器和处理器可以被实现为单独的芯片。可替代地,存储器和处理器可以被实现为彼此集成的单个芯片。处理器可以采用一个或多个处理器的形式。
41.图1是示出根据本发明的实施例的车辆后方警告系统的配置的视图。图2是示出根据本发明的实施例的车辆后方警告系统的示例的视图。图3是示出根据本发明的示例的车辆后方警告系统中的与目标车辆的位置相对应的第一边界和第二边界的位置的视图。
42.在下文中,将参照附图1至3描述根据本发明的优选实施例的车辆后方警告系统。
43.根据本发明的车辆后方警告系统可以检测从后侧方接近主车辆100的目标车辆200,并且向车辆的乘客发出警报信号,从而减少了追尾碰撞或侧擦碰撞的事故。
44.能够检测目标车辆200的多个检测装置安装在主车辆的后部,以便能够检测在主车辆后方在横向方向上行驶的目标车辆200。
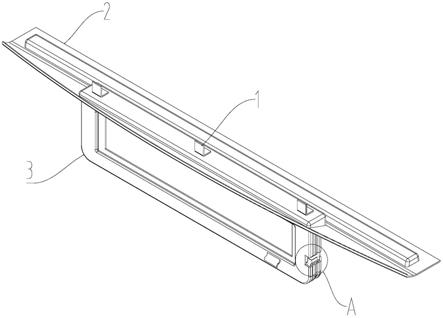
45.根据本发明的车辆后方警告系统可以设定碰撞检测范围,该碰撞检测范围用于检测以高于预定速度的速度在主车辆后方的横向方向上行驶的目标车辆200。可以在目标车辆200进入碰撞检测范围之前减小碰撞检测范围以形成警告产生范围a,在警告产生范围a中,当目标车辆200完全进入碰撞检测范围时生成碰撞警告。因此,针对目标车辆200在主车辆100后方的横向方向上的小运动不会产生警告,并且仅当完全进入警告产生范围a时才使得检测成为可能,从而预防了错误检测。
46.当目标车辆200完全进入警告产生范围a并维持与主车辆100的距离时,碰撞检测范围可以扩大到警告维持范围b。因此,当在后侧方的目标车辆200完全离开警告维护范围b时,警告被取消,并且即使随着警告维护范围b的扩大而检测到目标车辆200的微小移动,警告信号也不会消除,从而可以准确检测到位于主车辆100的后侧方的目标车辆200。
47.图2中的曲线图1示出了根据本发明的车辆后方警告系统的警告信号,“1”表示信号接通,“0”表示信号断开。曲线图2示出了碰撞警告范围的变化。曲线图3示出了用于确定目标车辆200的移动性的计数器,并且示出了60秒的运动,其中在朝着主车辆100行驶或远离主车辆100行驶时加1。曲线图4示出了碰撞警告后目标车辆200的行驶方向。
48.具体地,根据本发明的车辆后方警告系统包括:检测单元10,其检测目标车辆的位置;估计单元20,其基于由检测单元10检测到的目标车辆200的位置来估计目标车辆200的行驶方向,以及设定单元30,其对主车辆100设定碰撞警告范围,并基于由估计单元20估计的目标车辆200的行驶方向来改变碰撞警告范围。
49.进一步参考图1和图2,检测单元10可以检测在主车辆后方改变车道的同时在横向方向上行驶的目标车辆200,并形成碰撞检测范围以检测目标车辆200进入碰撞检测范围。
50.估计单元20可以检测在主车辆100后方在横向方向上行驶的目标车辆200的移动性,并估计目标车辆200的行驶方向。当目标车辆200在主车辆100后方在横向方向上行驶时,图2的曲线图4中的数值1表示目标车辆200远离主车辆100行驶,2表示目标车辆200朝主
车辆100行驶。
51.如图2的曲线图2所示,设定单元30可以改变碰撞警告范围。设定单元30可以基于由估计单元20估计的目标车辆200的行驶方向来改变碰撞警告范围。因此,当目标车辆离开碰撞警告范围时,减小碰撞警告范围,从而将目标车辆200的准确位置告知给乘客。
52.检测单元10连接至安装在主车辆后部的雷达传感器50,并检测位于主车辆后方或侧方的目标车辆200的位置。
53.检测单元10可以通过安装在主车辆后方的雷达传感器50来检测在主车辆后方横向方向行驶的目标车辆200,检测单元10还可以连接至除雷达传感器500以外的装置,例如能够检测目标车辆200的超声波传感器。
54.设定单元30设定第一边界与在主车辆100的横向方向上与第一边界间隔开的第二边界之间的碰撞警告范围,并基于由估计单元20估计的目标车辆200的行驶方向来改变第一边界或第二边界。
55.可以通过如下表所示的公式的应用来移动第一边界和第二边界。
[0056][0057]
碰撞警告范围可以形成为具有彼此间隔开的第一边界和第二边界,从而当目标车辆200在第一边界和第二边界之间前进时可以向乘客建议,并基于目标车辆200的行驶方向来移动第一边界或第二边界,从而可以减小目标车辆200的实际位置与传感器检测到的位置之间的误差。
[0058]
上表示出了目标车辆未进入警告产生范围a,并且将公式a应用于第一边界而将公式b应用于第二边界的情况。
[0059]
在图2的a中,第一边界可以形成为与主车辆100相距1.64m,第二边界可以形成为与主车辆100相距5.36m。第一边界和第二边界的数值是任意值,并且可以改变。
[0060]
还包括计算单元40,其基于由检测单元10检测到的目标车辆200的位置来计算目标车辆200与主车辆100之间的横向距离,并且设定单元30将主车辆100和目标车辆200之间的横向距离与预定距离进行比较,并基于比较结果改变碰撞警告范围。
[0061]
进一步参考图2,图2的曲线图3示出了计算目标车辆的位置的计算单元40的信号。
计算单元40可以实时计算在主车辆100后方的横向方向上行驶的目标车辆200的位置,并且将位置的增加和减少输入到设定单元30中。
[0062]
因此,当目标车辆200进入碰撞警告范围时,碰撞警告范围从警告产生范围a改变为警告维持范围b,从而具有无需识别除目标车辆200外的其他车辆即可准确识别目标车辆200的效果。
[0063]
当估计单元20估计目标车辆200与主车辆100之间的横向距离增加时,设定单元30将第二边界朝向主车辆100移动。
[0064]
进一步参考图2和图3,设定单元30可以在目标车辆200在主车辆100后方的横向方向上行驶的情况下改变碰撞警告范围。
[0065]
可以将公式b
‑
δσ应用于上表中的第二边界。
[0066]
当估计距主车辆100的横向距离增加使得目标车辆200在警告信号之后离开碰撞警报范围时,设定单元30将第二边界朝向主车辆100移动以迅速取消警告信号。
[0067]
因此,具有减小目标车辆200行驶时目标车辆200的实际位置与碰撞警告范围之间的误差的效果。
[0068]
当估计单元20估计目标车辆200与主车辆100之间的横向距离减小时,设定单元30将第一边界移动远离主车辆100。
[0069]
进一步参考图2和图3,设定单元30可以在目标车辆200在主车辆100后方的横向方向上行驶以接近主车辆100的情况下改变碰撞警告范围。
[0070]
可以将公式a δγ应用于上表中的第一边界。
[0071]
当估计距主车辆100的横向距离减小并且目标车辆200在碰撞警告之后离开碰撞警告范围时,设定单元30将第一边界移动远离主车辆100以迅速取消警告信号。
[0072]
因此,具有减小目标车辆200行驶时目标车辆200的实际位置与碰撞警告范围之间的误差的效果。
[0073]
还包括计算单元40,其基于由检测单元10检测到的目标车辆200的位置来计算目标车辆200与主车辆100之间的横向距离,并且设定单元30将由估计单元20估计的主车辆100和目标车辆200之间的横向距离与预定距离进行比较,并基于比较结果改变碰撞警告范围。
[0074]
计算单元40实时计算在主车辆100后方的横向方向上行驶的目标车辆200的位置,并将其输入到设定单元30中。
[0075]
因此,当目标车辆200进入碰撞警告范围时,碰撞警告范围从警告产生范围a改变为警告维持范围b,从而具有无需识别除目标车辆200外的其他车辆即可准确识别目标车辆200的效果。
[0076]
当计算单元40计算出目标车辆200与主车辆100之间的横向距离小于第一边界或大于第二边界时,设定单元30将第一边界朝向主车辆100移动并且将第二边界移动远离主车辆100。
[0077]
当计算单元40计算出目标车辆200的位置小于靠近主车辆的第一边界或大于与远离主车辆的第一边界间隔开的第二边界,并确定目标车辆200在碰撞警告范围之外时,设定单元30可以将第一边界朝向主车辆100移动以减小警告维持范围b,并将第二边界移动远离主车辆100以再次形成警告产生范围a。
[0078]
这产生了可靠地消除针对目标车辆200在移动之前行进到与第一边界和第二边界相邻的位置的碰撞警告的效果。
[0079]
当计算单元40计算出目标车辆200与主车辆100之间的横向距离在第一边界与第二边界之间时,设定单元30将第二边界移动远离主车辆100,并将第一边界朝向主车辆100移动。
[0080]
进一步参考图2和图3,设定单元30可以在目标车辆200与主车辆100之间的距离增加到主车辆100的后侧方的第一边界与第二边界之间的情况下改变碰撞警告范围。
[0081]
在上表中,公式a
‑
δα可以应用于第一边界,而公式b δβ可以应用于第二边界。
[0082]
接下来将描述图2的c和g和图3的
②
中的情况,当计算单元40计算出目标车辆200与主车辆100之间的横向距离在第一边界和第二边界之间时,设定单元30将第一边界移动到1.44m并且将第二边界移动到5.56m以形成警告维护范围b。边界范围的数值可以改变。
[0083]
因此,目标车辆200的小运动不会消除碰撞警告,从而具有为发生追尾碰撞事故做好准备的效果。
[0084]
当估计单元20估计目标车辆200远离主车辆100行驶并且计算单元40计算目标车辆200与主车辆100之间的距离等于或大于预定第一距离时,设定单元30将第二边界朝向主车辆100移动。
[0085]
进一步参考图2和图3,设定单元30可以在目标车辆200与主车辆100之间的距离从主车辆100的后侧方的预定的第一距离增加到预定的第二距离的情况下改变碰撞警告范围。
[0086]
公式b δβ
–
δσ可应用于上表中的第二边界。
[0087]
接下来将描述图2的d中以及从图2的
②
切换到
③
的情况。当计算单元40计算出目标车辆200与主车辆100之间的距离等于或大于预定的第一距离并且估计单元20估计目标车辆200在碰撞警告范围内离开主车辆100行驶时,设定单元30将第二边界移动到4.86m。图2的边界范围数值可以改变。第一距离可以是到与主车辆100间隔开的相邻车道的距离。
[0088]
因此,随着第二边界朝向主车辆100移动,碰撞警告范围变小,针对离开主车辆100行驶的目标车辆200的碰撞警告被迅速取消,从而具有进一步提高车辆后方警告系统的准确性的效果。
[0089]
当估计单元20估计目标车辆200朝向主车辆100行驶并且计算单元40计算目标车辆200与主车辆100之间的距离等于或小于预定的第二距离时,设定单元30将第一边界移动远离主车辆100。
[0090]
进一步参考图2和图3,设定单元30可以在目标车辆200与主车辆100之间的距离在主车辆100的后侧方减小的情况下改变碰撞警告范围。这是目标车辆200从主车辆100后方离开碰撞警告范围的情况。
[0091]
可以将公式a
‑
δα δγ应用于上表中的第一边界。
[0092]
接下来将描述图2的h中以及从图3的
④
切换到
⑤
的情况。当计算单元40计算出目标车辆200与主车辆100之间的距离等于或小于预定的第二距离并且估计单元20估计目标车辆200朝向主车辆100行驶时,设定单元30将第一边界移动至1.78m。在目标车辆200朝向主车辆100行驶并离开碰撞警告范围的情况下,移动第一边界远离主车辆100,并且在目标车辆200离开碰撞警告范围时取消碰撞警告。
[0093]
第二距离可以是到在主车辆100的两侧上、与主车辆100间隔开的车道的距离。
[0094]
因此,当目标车辆200从碰撞警告范围向后移动到主车辆100的后方时,可以准确地检测到目标车辆200,从而可以消除碰撞警告,并且具有减轻乘客因频繁的警报而感觉疲劳的效果。
[0095]
图4是示出根据本发明的实施例的车辆后方警告方法的流程图。
[0096]
参照图4,根据本发明实施例的车辆后方检测方法包括:检测步骤s10,检测目标车辆的位置;估计步骤s11,基于在检测步骤s10中检测到的目标车辆200的位置来估计目标车辆200的行驶方向,以及设定步骤s20,针对主车辆100设定碰撞警告范围并基于在估计步骤s11中估计的目标车辆200的行驶方向来改变碰撞警告范围。
[0097]
在检测步骤s10中,结合安装在主车辆后部的雷达传感器50检测位于主车辆后方或侧方的目标车辆200的位置。
[0098]
在设定步骤s20中,在主车辆100的横向方向上彼此间隔开的第一边界和第二边界之间设定碰撞警告范围,并且基于在估计步骤s11中估计的目标车辆200的行驶方向移动第一边界和第二边界。
[0099]
当在估计步骤s11中估计目标车辆200与主车辆100之间的横向距离增加时,在设定步骤s20中将第二边界朝向主车辆100移动。
[0100]
当在估计步骤s11中估计目标车辆200与主车辆100之间的横向距离减小时,在设定步骤s20中将第一边界移动远离主车辆100。
[0101]
还包括计算步骤s12,其基于在检测步骤s10中检测到的目标车辆200的位置来计算主车辆100与目标车辆200之间的横向距离,并且将在计算步骤s12中计算出的主车辆100与目标车辆200之间的横向距离与预定距离进行比较,并在设定步骤s20中基于比较结果来改变碰撞警告范围。
[0102]
当在估计步骤s12中估计目标车辆200与主车辆100之间的横向距离小于第一边界或大于第二边界时,在设定步骤s20中,将第一边界朝向主车辆100移动并且将第二边界移动远离主车辆100。
[0103]
当在估计步骤s12中估计目标车辆200与主车辆100之间的横向距离在第一边界和第二边界之间时,在设定步骤s20中,将第二边界移动远离主车辆100并且将第一边界朝向主车辆100移动。
[0104]
当在估计步骤s11中估计目标车辆200远离主车辆100行驶并且在计算步骤s12中计算出目标车辆200和主车辆100之间的距离等于或大于预定的第一距离时,在设定步骤s20中,将第二边界朝向主车辆100移动。
[0105]
当在估计步骤s11中估计目标车辆200朝向主车辆100行驶并且在计算步骤s12中计算出目标车辆200与主车辆100之间的距离等于或小于预定的第二距离时,在设定步骤s20中将第一边界移动远离主车辆100。
[0106]
图示和描述了本发明的特定实施例,但是对于本领域的普通技术人员来说,显然可以在由以下专利权利要求书提供的本发明的技术精神范围内以各种方式对本发明进行改进和修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。