1.本公开涉及无人车辆的管理系统以及无人车辆的管理方法。
背景技术:
2.如专利文献1所公开的那样,在矿山那样的广域的作业现场,无人车辆行驶。
3.在先技术文献
4.专利文献
5.专利文献1:日本特开2008-210378号公报
技术实现要素:
6.发明要解决的课题
7.在作业现场修成行驶路。无人车辆在行驶路上行驶。在例如修成了路宽不必要地较宽的行驶路的情况下,难以抑制行驶路的修成所需的成本。
8.本公开的目的在于,抑制行驶路的修成所需的成本,且使无人车辆能够在行驶路上适当地行驶。
9.用于解决课题的手段
10.根据本公开,提供一种无人车辆的管理系统,其具备:行驶区域定义部,其在作业现场的行驶路中定义行驶区域;以及判断部,其基于表示无人车辆的宽度的车宽及表示所述行驶区域的宽度的行驶路宽,判断所述无人车辆是否能够进入所述行驶区域。
11.发明效果
12.根据本公开,能够抑制行驶路的修成所需的成本,且使无人车辆在行驶路上适当地行驶。
附图说明
13.图1是示出实施方式的无人车辆的管理系统的示意图。
14.图2是示出实施方式的无人运输车辆的立体图。
15.图3是示出实施方式的无人洒水车辆的立体图。
16.图4是示出实施方式的作业现场的示意图。
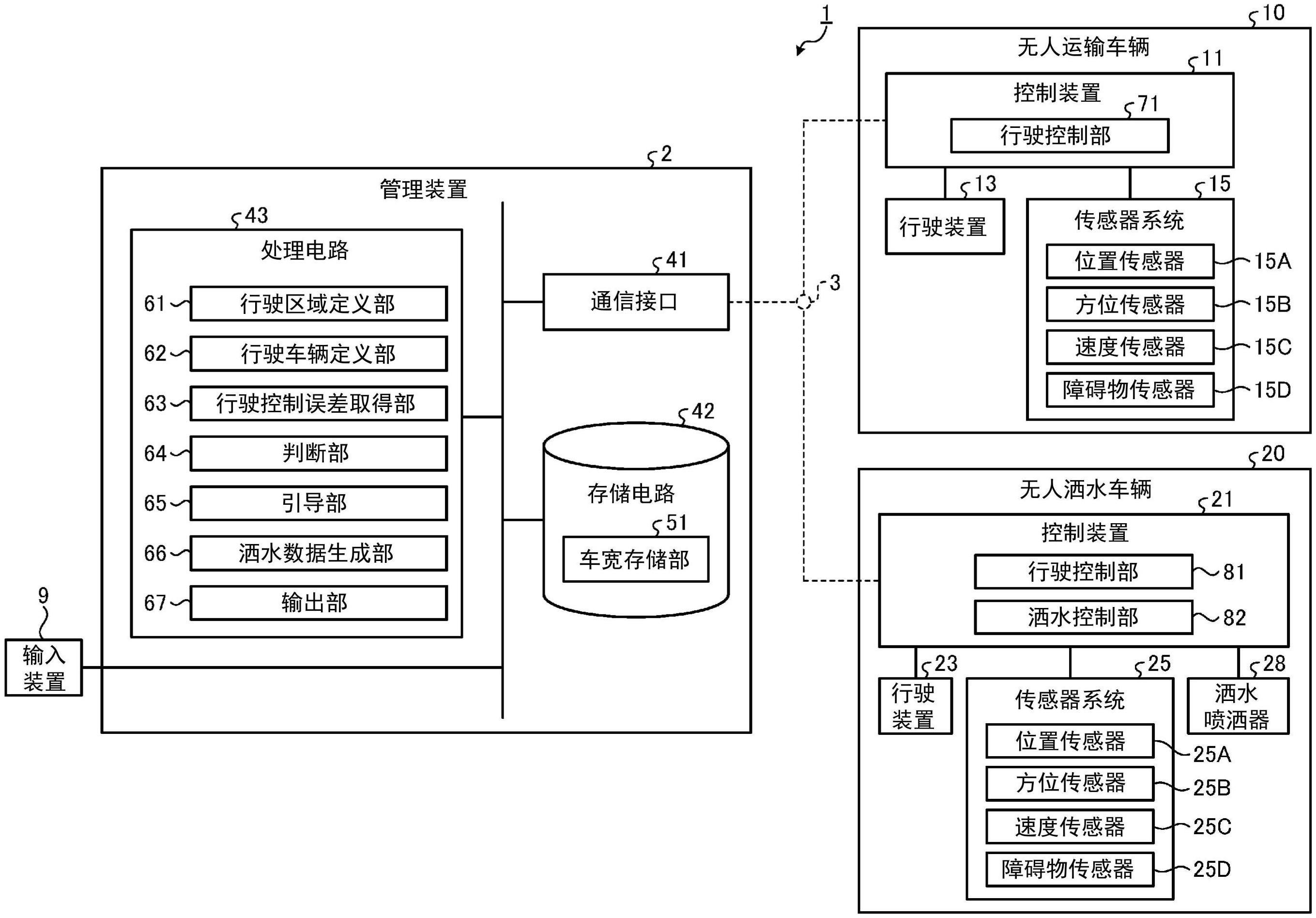
17.图5是示出实施方式的无人车辆的管理系统的功能框图。
18.图6是用于说明实施方式的第一行驶区域的图。
19.图7是用于说明实施方式的第二行驶区域的图。
20.图8是示出实施方式的行驶区域的定义方法的流程图。
21.图9是示出实施方式的在行驶路中定义的行驶路线的示意图。
22.图10是示出实施方式的在行驶路中定义的第一行驶区域及第二行驶区域的示意图。
23.图11是示出实施方式的无人车辆的行驶可否判断方法的流程图。
具体实施方式
24.以下,参照附图对本公开的实施方式进行说明,但本公开并不限定于实施方式。以下所说明的实施方式的构成要素可以适当组合。另外,也有时不使用一部分的构成要素。
25.[管理系统的概要]
[0026]
图1是示出实施方式的无人车辆的管理系统1的示意图。管理系统1对在作业现场工作的无人车辆进行管理。无人车辆是指不依赖于由驾驶员进行的驾驶操作而以无人的方式工作的作业车辆。在实施方式中,在作业现场工作的无人车辆包括第一无人车辆10及第二无人车辆20。第一无人车辆10的外形的尺寸与第二无人车辆20的外形的尺寸不同。第二无人车辆20的外形的尺寸比第一无人车辆10的外形的尺寸小。
[0027]
在实施方式中,第一无人车辆10是无人运输车辆。第二无人车辆20是无人洒水车辆。在以下的说明中,将第一无人车辆10适当称作无人运输车辆10,将第二无人车辆20适当称作无人洒水车辆20。
[0028]
无人运输车辆10以无人方式在作业现场行驶以运输装载货物。作为无人运输车辆10,例示无人自卸车。作为无人运输车辆10所运输的装载货物,例示在作业现场挖掘出的挖掘物。
[0029]
无人洒水车辆20以无人方式在作业现场行驶以进行洒水。作为无人洒水车辆20,例示无人洒水车辆。无人洒水车辆20在作业现场进行洒水以抑制粉尘或者砂尘扩散。
[0030]
管理系统1具备管理装置2及通信系统3。管理装置2设置于作业现场的管制设施4。在管制设施4中存在管理者。
[0031]
无人运输车辆10具有控制装置11。无人洒水车辆20具有控制装置21。管理装置2、控制装置11、以及控制装置21经由通信系统3无线通信。管理装置2与无线通信机3a连接。控制装置11与无线通信机3b连接。控制装置21与无线通信机3c连接。通信系统3包括无线通信机3a、无线通信机3b、以及无线通信机3c。
[0032]
[无人运输车辆]
[0033]
图2是示出实施方式的无人运输车辆10的立体图。如图1以及图2所示,无人运输车辆10具备无线通信机3b、控制装置11、车辆主体12、行驶装置13、卸料车体14、以及传感器系统15。
[0034]
车辆主体12包括车身框架。车辆主体12支承于行驶装置13。车辆主体12支承卸料车体14。
[0035]
行驶装置13产生用于使无人运输车辆10行驶的驱动力。行驶装置13产生用于使无人运输车辆10减速或者停止的制动力。行驶装置13产生用于使无人运输车辆10回转的转向力。行驶装置13使无人运输车辆10前进或者后退。行驶装置13包括车轮16。在车轮16装配有轮胎17。车轮16包括前轮16f及后轮16r。轮胎17包括装配于前轮16f的前轮胎17f、以及装配于后轮16r的后轮胎17r。通过在轮胎17与作业现场的路面接触的状态下车轮16旋转,从而无人运输车辆10在作业现场行驶。
[0036]
卸料车体14是堆积装载货物的构件。卸料车体14的至少一部分配置于比车辆主体12靠上方的位置。
[0037]
传感器系统15包括位置传感器15a、方位传感器15b、速度传感器15c、以及障碍物传感器15d。位置传感器15a检测无人运输车辆10的位置。无人运输车辆10的位置利用全球
卫星导航系统(gnss)检测。位置传感器15a包括gnss接收机,检测无人运输车辆10的全局坐标系的位置。方位传感器15b检测无人运输车辆10的方位。作为方位传感器15b,例示陀螺仪传感器。速度传感器15c检测无人运输车辆10的行驶速度。作为速度传感器15c,例示检测车轮16的旋转的脉冲传感器。障碍物传感器15d检测无人运输车辆10的周围的障碍物。障碍物传感器15d以非接触的方式检测障碍物。作为障碍物传感器15d,例示激光传感器(lidar:light detection and ranging)或者雷达传感器(radar:radio detection and ranging)。
[0038]
[无人洒水车辆]
[0039]
图3是示出实施方式的无人洒水车辆20的立体图。如图1以及图3所示,无人洒水车辆20具备无线通信机3c、控制装置21、车辆主体22行驶装置23、水箱24、传感器系统25、以及洒水喷洒器28。
[0040]
车辆主体22包括车身框架。车辆主体22支承于行驶装置23。车辆主体22支承水箱24。
[0041]
在实施方式中,在车辆主体22设置有驾驶室29。驾驶室29设置于车辆主体22的前部。驾驶员搭乘于驾驶室29,能够实施无人洒水车辆20的驾驶操作。在例如实施无人洒水车辆20的维护或者检修的情况,驾驶员实施无人洒水车辆20的驾驶操作。在实施方式中,无人洒水车辆20至少在作业现场进行洒水时以无人的方式工作。需要说明的是,驾驶室29也可以不设置于无人洒水车辆20。
[0042]
行驶装置23产生用于使无人洒水车辆20行驶的驱动力。行驶装置23产生用于使无人洒水车辆20减速或者停止的制动力。行驶装置23产生用于使无人洒水车辆20回转的转向力。行驶装置23使无人洒水车辆20前进或者后退。行驶装置23包括车轮26。在车轮26装配有轮胎27。车轮26包括前轮26f及后轮26r。前轮26f是转向轮,后轮26r是驱动轮。需要说明的是,也可以是前轮26f及后轮26r双方为转向轮。也可以是前轮26f及后轮26r双方为驱动轮。也可以是前轮26f为驱动轮而后轮26r为转向轮。轮胎27包括装配于前轮26f的前轮胎27f、及装配于后轮26r的后轮胎27r。通过在轮胎27与作业现场的路面接触的状态下车轮26旋转,从而无人洒水车辆20在作业现场行驶。
[0043]
水箱24是贮存用于洒水的水的构件。水箱24的至少一部分配置于比车辆主体22靠上方的位置。
[0044]
传感器系统25包括位置传感器25a、方位传感器25b、速度传感器25c、以及障碍物传感器25d。位置传感器25a检测无人洒水车辆20的位置。无人洒水车辆20的位置利用全球卫星导航系统(gnss)来检测。位置传感器25a包括gnss接收机,检测无人洒水车辆20的全局坐标系的位置。方位传感器25b检测无人洒水车辆20的方位。作为方位传感器25b,例示陀螺仪传感器。速度传感器25c检测无人洒水车辆20的行驶速度。作为速度传感器25c,例示检测车轮26的旋转的脉冲传感器。障碍物传感器25d检测无人洒水车辆20的周围的障碍物。障碍物传感器25d以非接触的方式检测障碍物。作为障碍物传感器25d,例示激光传感器(lidar:light detection and ranging)或者雷达传感器(radar:radio detection and ranging)。
[0045]
洒水喷洒器28喷射水箱24的水。洒水喷洒器28配置于水箱24的后部。洒水喷洒器28向无人洒水车辆20的后方洒水。在实施方式中,洒水喷洒器28设置有多个。多个洒水喷洒
state drive)。作为易失性存储器,例示ram(random access memory)。
[0063]
处理电路43实施运算处理以及控制指令的输出处理。作为处理电路43,例示处理器。作为处理器,例示cpu(central processing unit)或者mpu(micro processing unit)。计算机程序存储于存储电路42。处理电路43从存储电路42取得并执行计算机程序,由此发挥规定的功能。
[0064]
存储电路42具有车宽存储部51。
[0065]
车宽存储部51存储表示无人车辆的宽度的车宽。无人车辆的车宽包括表示无人运输车辆10的宽度的第一车宽wv1以及表示无人洒水车辆20的宽度的第二车宽wv2。车宽存储部51分别存储表示无人运输车辆10的宽度的第一车宽wv1以及表示无人洒水车辆20的宽度的第二车宽wv2。第一车宽wv1是指在直行状态的无人运输车辆10中与车轮16的旋转轴平行的方向上的无人运输车辆10的外形的尺寸。第二车宽wv2是指在直行状态的无人洒水车辆20中与车轮26的旋转轴平行的方向上的无人洒水车辆20的外形的尺寸。第一车宽wv1是根据无人运输车辆10的规格推导的已知数据。第二车宽wv2是根据无人洒水车辆20的规格推导的已知数据。第一车宽wv1以及第二车宽wv2分别经由输入装置9输入存储电路42。车宽存储部51分别存储从输入装置9输入的第一车宽wv1以及第二车宽wv2。在实施方式中,无人洒水车辆20的外形的尺寸比无人运输车辆10的外形的尺寸小。无人洒水车辆20的第二车宽wv2比无人运输车辆10的第一车宽wv1窄。
[0066]
处理电路43具有行驶区域定义部61、行驶车辆定义部62、行驶控制误差取得部63、判断部64、引导部65、洒水数据生成部66、以及输出部67。
[0067]
行驶区域定义部61在作业现场的行驶路36中定义行驶区域。行驶区域是指允许按照目标行驶轨迹(行驶路线)行驶的无人车辆的行驶的区域。在实施方式中,由行驶区域定义部61定义的行驶区域包括第一行驶路宽wl1的第一行驶区域103、以及比第一行驶路宽wl1窄的第二行驶路宽wl2的第二行驶区域203。
[0068]
行驶车辆定义部62定义在作业现场的行驶区域行驶的无人车辆。在实施方式中,由行驶车辆定义部62定义的无人车辆包括第一车宽wv1的无人运输车辆10、以及比第一车宽wv1窄的第二车宽wv2的无人洒水车辆20。
[0069]
行驶控制误差取得部63取得以目标行驶速度(第一行驶速度)行驶的无人车辆的车宽方向上的行驶控制误差(位置偏移量δ)。无人车辆的车宽方向上的行驶控制误差(位置偏移量δ)是指按照目标行驶轨迹(行驶路线)行驶的无人车辆的目标位置与实际的位置的车宽方向上的偏移量。行驶控制误差取得部63取得对应于无人运输车辆10以及无人洒水车辆20各自的目标度行驶速度的行驶控制误差(位置偏移量δ)。行驶控制误差(位置偏移量δ)预先保存于存储电路42。行驶控制误差(位置偏移量δ)例如基于行驶试验的结果而预先保存于存储电路42。关于行驶控制误差(位置偏移量δ),无人车辆的行驶速度越高则行驶控制误差(位置偏移量δ)越大,无人车辆的行驶速度越低则行驶控制误差(位置偏移量δ)越小。
[0070]
判断部64基于表示无人车辆的宽度的车宽以及表示行驶区域的宽度的行驶路宽,判断无人车辆能够进入行驶区域。判断部64在判断为无人车辆的车宽比行驶区域的行驶路宽窄的情况下,判断为无人车辆能够进入行驶区域。
[0071]
另外,判断部64在基于由行驶控制误差取得部63取得的位置偏移量δ而判断为以
目标行驶速度行驶的无人车辆没有从行驶区域脱离的情况下,判断为无人车辆能够进入行驶区域。另外,判断部64在判断为即使以目标行驶速度行驶的无人车辆会从行驶区域脱离、但以比目标行驶速度低的行驶速度(第二行驶速度)行驶时不会从行驶区域脱离的情况下,判断为无人车辆能够进入行驶区域。
[0072]
引导部65以使无人运输车辆10进入第一行驶区域103而不进入第二行驶区域203的方式对无人运输车辆10进行引导。引导部65以使无人洒水车辆20分别进入第一行驶区域103以及第二行驶区域203的方式对无人洒水车辆20进行引导。引导部65输出以使无人运输车辆10进入第一行驶区域103而不进入第二行驶区域203的方式对无人运输车辆10进行引导的引导指令。引导部65输出以使无人洒水车辆20分别进入第一行驶区域103以及第二行驶区域203的方式对无人洒水车辆20进行引导的引导指令。
[0073]
洒水数据生成部66生成用于控制洒水喷洒器28的洒水数据。洒水数据包含从洒水喷洒器28的洒水的执行及洒水的停止、洒水喷洒器28在作业现场进行洒水的洒水位置、以及从洒水喷洒器28的每单位时间的洒水量中的至少一个。洒水喷洒器28进行洒水的洒水位置包含表示被从洒水喷洒器28洒水的行驶路36(作业现场)中的区域的洒水区域。另外,设置有多个洒水喷洒器28的情况,洒水数据包含执行洒水的洒水喷洒器28的数量。另外,在洒水喷洒器28分别设置于无人洒水车辆20的多个位置的情况下,洒水数据包含执行洒水的洒水喷洒器28的设置位置。洒水数据生成部66可以基于来自输入装置9的输入数据来生成洒水数据。
[0074]
输出部67将由行驶区域定义部61定义的路线数据发送至无人车辆。输出部67从通信接口41向无人运输车辆10的控制装置11以及无人洒水车辆20的控制装置21分别发送路线数据。另外,输出部67将由洒水数据生成部66生成的洒水数据发送至无人洒水车辆20。输出部67从通信接口41向无人洒水车辆20的控制装置21发送洒水数据。
[0075]
控制装置11包括计算机系统。与管理装置2同样地,控制装置11具有通信接口、存储电路、以及处理电路。控制装置11具有控制行驶装置13的行驶控制部71。行驶控制部71基于从管理装置2发送来的路线数据对行驶装置13进行控制。
[0076]
控制装置21包括计算机系统。与管理装置2同样地,控制装置21具有通信接口、存储电路、以及处理电路。控制装置21具有控制行驶装置23的行驶控制部81、以及控制洒水喷洒器28的洒水控制部82。行驶控制部81基于从管理装置2发送来的路线数据对行驶装置23进行控制。洒水控制部82基于从管理装置2发送来的洒水数据对洒水喷洒器28进行控制。
[0077]
[行驶区域]
[0078]
图6是用于说明实施方式的第一行驶区域103的图。
[0079]
行驶区域定义部61在行驶路36中定义第一行驶区域103。第一行驶区域103基于规定无人车辆(无人运输车辆10以及无人洒水车辆20)的行驶条件的路线数据而被定义。行驶区域定义部61分别定义路线数据以及第一行驶区域103。
[0080]
在实施方式中,路线数据被无人运输车辆10和无人洒水车辆20共享。
[0081]
路线数据由行驶区域定义部61定义。路线数据包含路线点101、行驶路线102、无人车辆的目标位置、无人车辆的目标方位、以及无人车辆的目标行驶速度。
[0082]
路线点101在行驶路36中设定多个。路线点101规定无人车辆的目标位置。针对多个路线点101分别设定无人车辆的目标方位以及目标行驶速度。多个路线点101隔开间隔地
设定。路线点101的间隔例如设定为1[m]以上且5[m]以下。路线点101的间隔既可以均匀也可以不均匀。
[0083]
行驶路线102是指表示无人车辆的目标行驶轨迹的假想线。行驶路线102由通过多个路线点101的轨迹规定。无人车辆按照行驶路线102在行驶路36上行驶。
[0084]
无人车辆的目标位置是指通过路线点101时的无人车辆的目标位置。无人车辆的目标位置既可以在无人车辆的局部坐标系中被规定,也可以在全局坐标系中被规定。
[0085]
无人车辆的目标方位是指通过路线点101时的无人车辆的目标方位。
[0086]
无人车辆的目标行驶速度是指通过路线点101时的无人车辆的目标行驶速度。无人车辆的目标行驶速度包含表示无人车辆的行驶速度的上限值的上限速度(限制速度)。无人车辆以不超过上限速度的行驶速度在作业现场行驶。
[0087]
无人运输车辆10的行驶控制部71基于路线数据以及传感器系统15的检测数据对行驶装置13进行控制。行驶控制部71基于位置传感器1sa的检测数据以及方位传感器15b的检测数据,以使无人运输车辆10按照行驶路线102行驶的方式对行驶装置13进行控制。即,行驶控制部71以使表示针对路线点101设定的无人运输车辆10的目标位置与通过路线点101时由位置传感器15a检测到的无人运输车辆10的检测位置108的偏差的位置偏移量δ变小的方式对行驶装置13进行控制。另外,行驶控制部71以使针对路线点101设定的无人运输车辆10的目标方位与通过路线点101时由方位传感器15b检测到的无人运输车辆10地检测方位的偏差变小的方式对行驶装置13进行控制。另外,行驶控制部71基于速度传感器15c的检测数据,以使无人运输车辆10以目标行驶速度行驶的方式对行驶装置13进行控制。即,行驶控制部71以使针对路线点101设定的无人运输车辆10的目标行驶速度与通过路线点101时由速度传感器15c检测到的无人运输车辆10的检测行驶速度的偏差变小的方式对行驶装置13进行控制。
[0088]
如上所述,无人运输车辆10的目标行驶速度包含无人运输车辆10的上限速度。行驶控制部71基于速度传感器15c的检测数据,以使无人运输车辆10以不超过上限速度的行驶速度行驶的方式对行驶装置13进行控制。即,行驶控制部71以使通过路线点101时由速度传感器15c检测到的无人运输车辆10的检测行驶速度不超过针对路线点101设定的无人运输车辆10的上限速度的方式对行驶装置13进行控制。
[0089]
无人洒水车辆20的行驶控制部81基于路线数据以及传感器系统25的检测数据对行驶装置23进行控制。行驶控制部81基于位置传感器25a的检测数据以及方位传感器25b的检测数据,以使无人洒水车辆20按照行驶路线102行驶的方式对行驶装置23进行控制。即,行驶控制部81以使表示针对路线点101设定的无人洒水车辆20的目标位置与通过路线点101时由位置传感器25a检测到的无人洒水车辆20的检测位置208的偏差的位置偏移量δ变小的方式对行驶装置23进行控制。另外,行驶控制部81以使针对路线点101设定的无人洒水车辆20的目标方位与通过路线点101时由方位传感器25b检测到的无人洒水车辆20的检测方位的偏差变小的方式对行驶装置23进行控制。另外,行驶控制部81基于速度传感器25c的检测数据,以使无人洒水车辆20以目标行驶速度行驶的方式对行驶装置23进行控制。即,行驶控制部81以使针对路线点101设定的无人洒水车辆20的目标行驶速度与通过路线点101时由速度传感器25c检测到的无人洒水车辆20的检测行驶速度的偏差变小的方式对行驶装置23进行控制。
[0090]
如上所述,无人洒水车辆20的目标行驶速度包含无人洒水车辆20的上限速度。行驶控制部81基于速度传感器25c的检测数据,以使无人洒水车辆20以不超过上限速度的行驶速度行驶的方式对行驶装置23进行控制。即,行驶控制部81以使通过路线点101时由速度传感器25c检测到的无人洒水车辆20的检测行驶速度不超过针对路线点101设定的无人洒水车辆20的上限速度的方式对行驶装置23进行控制。
[0091]
行驶区域定义部61基于行驶路线102以及无人运输车辆10的第一车宽wv1来定义第一行驶区域103。行驶区域定义部61以使在无人运输车辆10的车宽方向上行驶路线102通过第一行驶区域103的中心的方式来定义第一行驶区域103。行驶区域定义部61以使第一行驶区域103的第一行驶路宽wl1比无人运输车辆10的第一车宽wv1宽的方式来定义第一行驶区域103。
[0092]
在实施方式中,行驶区域定义部61基于以上限速度行驶的无人运输车辆10的位置偏移量δ来定义第一行驶区域103的第一行驶路宽wl1。即,行驶区域定义部61以使按照行驶路线102以上限速度行驶的无人运输车辆10即使会从行驶路线102偏离也不会从第一行驶区域103脱离的方式,来定义第一行驶区域103的第一行驶路宽wl1。在实施方式中,第一行驶路宽wl1是无人运输车辆10的第一车宽wv1与无人运输车辆10的行驶控制误差之和。行驶控制部71以使无人运输车辆10不会从第一行驶区域103脱离的方式,基于针对路线点101设定的无人运输车辆10的目标位置以及通过路线点101时由位置传感器15a检测到的无人运输车辆10的检测位置108对行驶装置13进行控制。
[0093]
行驶区域定义部61以使第一行驶区域103的第一行驶路宽wl1比行驶路36的宽度窄的方式来定义第一行驶区域103。
[0094]
图7是用于说明实施方式的第二行驶区域203的图。
[0095]
行驶区域定义部61在行驶路36中定义第二行驶区域203。第二行驶区域203基于路线数据被定义。
[0096]
行驶区域定义部61基于行驶路线102以及无人洒水车辆20的第二车宽wv2来定义第二行驶区域203。行驶区域定义部61以使在无人洒水车辆20的车宽方向上行驶路线102通过第二行驶区域203的中心的方式来定义第二行驶区域203。行驶区域定义部61以使第二行驶区域203的第二行驶路宽wl2比无人洒水车辆20的第二车宽wv2宽的方式来定义第二行驶区域203。
[0097]
在实施方式中,行驶区域定义部61基于以上限速度行驶的无人洒水车辆20的位置偏移量δ来定义第二行驶区域203的第二行驶路宽wl2。即,行驶区域定义部61以使按照行驶路线102以上限速度行驶的无人洒水车辆20即使会从行驶路线102偏离也不会从第二行驶区域203脱离的方式来定义第二行驶区域203的第二行驶路宽wl2。在实施方式中,第二行驶路宽wl2为无人洒水车辆20的第二车宽wv2与无人洒水车辆20的行驶控制误差之和。行驶控制部81以使无人洒水车辆20不会从第二行驶区域203脱离的方式,基于针对路线点101设定的无人洒水车辆20的目标位置以及通过路线点101时由位置传感器25a检测到的无人洒水车辆20的检测位置208,对行驶装置13进行控制。
[0098]
行驶区域定义部61以使第二行驶区域203的第二行驶路宽wl2比行驶路36的宽度窄的方式来定义第二行驶区域203。
[0099]
[行驶区域的定义方法]
[0100]
图8是示出实施方式的行驶区域的定义方法的流程图。
[0101]
行驶区域定义部61生成无人车辆的路线数据。行驶区域定义部61在作业现场的行驶路36上定义行驶路线102(步骤sa1)。
[0102]
图9是示出实施方式的在行驶路36上定义的行驶路线102的示意图。在图9所示的例子中,行驶路线102被定义为将装入场31、排土场32、供油场34或供水场35连结。
[0103]
行驶车辆定义部62定义在行驶区域中行驶的无人车辆。在实施方式中,行驶车辆定义部62将无人运输车辆10以及无人洒水车辆20定义为在行驶区域中行驶的无人车辆(步骤sa2)。
[0104]
行驶区域定义部61从车宽存储部51取得无人车辆的车宽。在实施方式中,行驶区域定义部61取得无人运输车辆10的第一车宽wv1以及无人洒水车辆20的第二车宽wv2(步骤sa3)。
[0105]
行驶区域定义部61基于第一车宽wv1,计算无人运输车辆10以及无人洒水车辆20能够行驶的第一行驶区域103的第一行驶路宽wl1。另外,行驶区域定义部61基于第二车宽wv2,计算无人洒水车辆20能够行驶的第二行驶区域203的第二行驶路宽wl2(步骤sa4)。
[0106]
无人运输车辆10能够行驶的第一行驶路宽wl1比第一车宽wv1宽。无人洒水车辆20能够行驶的第二行驶路宽wl2比第二车宽wv2宽。
[0107]
行驶区域定义部61以成为在步骤sa4中计算出的第一行驶路宽wl1的方式来定义第一行驶区域103。行驶区域定义部61以成为在步骤sa4中计算出的第二行驶路宽wl2的方式来定义第二行驶区域203(步骤sa5)。
[0108]
图10是示出实施方式的在行驶路36上定义的第一行驶区域103以及第二行驶区域203的示意图。如图10所示,以包含行驶路线102的方式来分别定义第一行驶区域103以及第二行驶区域203。在图10所示的例子中,第一行驶区域103在连结装入场31和排土场32的行驶路36中被定义。第二行驶区域203在连结交叉点37和供油场34或供水场35的行驶路36中被定义。
[0109]
[无人车辆的行驶可否判断方法]
[0110]
图11是示出实施方式的无人车辆的行驶可否判断方法的流程图。
[0111]
判断部64判断规定的无人车辆能够进入由行驶区域定义部61定义的行驶区域(103、203)。即,判断部64判断规定的无人车辆能够在由行驶区域定义部61定义的行驶区域中行驶。判断部64决定由行驶车辆定义部62定义的多个无人车辆中的、判断对象的无人车辆(步骤sb1)。
[0112]
作为一例,设为在从排土场32经由交叉点37朝向供油场34行驶之后、从供油场34经由交叉点37朝向装入场31行驶的无人运输车辆10为判断对象。
[0113]
判断部64取得参照图10所说明那样的、由行驶区域定义部61定义的行驶区域(103、203)(步骤sb2)。
[0114]
判断部64判断无人运输车辆10的第一车宽wv1是否分别比第一行驶区域103的第一行驶路宽wl1以及第二行驶区域203的第二行驶路宽wl2窄(步骤sb3)。
[0115]
在步骤sb3中判断为第一车宽wv1分别比第一行驶路宽wl1以及第二行驶路宽wl2窄的情况下(步骤sb3:是),判断部64判断是否无人运输车辆10即使以上限速度(第一行驶速度)分别在第一行驶区域103以及第二行驶区域203中行驶也不会分别从第一行驶区域
103以及第二行驶区域203脱离(步骤sb4)。
[0116]
在步骤sb4中判断为以上限速度行驶的无人运输车辆10能够分别在第一行驶区域103以及第二行驶区域203中以不会脱离的方式行驶的情况下(步骤sb4:是),引导部65向无人运输车辆10输出引导指令,以使得以上限速度进入第二行驶区域203。即,引导部65向无人运输车辆10输出引导指令,以使得在从排土场32经由交叉点37朝向供油场34行驶之后、从供油场34经由交叉点37朝向装入场31行驶。引导部65向无人运输车辆10输出引导指令,以使得分别在第一行驶区域103以及第二行驶区域203中以上限速度行驶(步骤sb5)。
[0117]
在步骤sb4中判断为以上限速度行驶的无人运输车辆10即使不会从第一行驶区域103脱离但会从第二行驶区域203脱离的情况下(步骤sb4:否),判断部64判断如果为比上限速度低的行驶速度(第二行驶速度)的话无人运输车辆10是否会从第二行驶区域203脱离(步骤sb6)。
[0118]
在步骤sb6中判断为如果为比上限速度低的行驶速度的话则无人运输车辆10不会从第二行驶区域203脱离的情况下(步骤sb6:是),引导部65向无人运输车辆10输出引导指令,以使得以比上限速度低的行驶速度进入第二行驶区域203。即,引导部65向无人运输车辆10输出引导指令,以使得在从排土场32经由交叉点37朝向供油场34行驶之后、从供油场34经由交叉点37朝向装入场31行驶。引导部65向无人运输车辆10输出引导指令,以使得在第一行驶区域103中以上限速度行驶、且在交叉点37与供油场34之间的第二行驶区域203中以比上限速度低的行驶速度行驶(步骤sb7)。
[0119]
在步骤sb6判断为即使为比上限速度低的行驶速度无人运输车辆10也会从第二行驶区域203脱离的情况下(步骤sb6:否),或者在步骤sb3中判断为第一车宽wv1比第二行驶路宽wl2宽的情况下(步骤sb3:否)。引导部65向无人运输车辆10输出引导指令,以使得不进入第二行驶区域203(步骤sb8)。
[0120]
即,引导部65向无人运输车辆10输出引导指令,以使得不去向供油场34。引导部65向无人运输车辆10输出引导指令,以使得从排土场32朝向装入场31行驶。
[0121]
以上,参照图11对无人运输车辆10的行驶可否判断方法进行了说明。关于无人洒水车辆20也是同样的。在实施方式中,无人洒水车辆20能够分别进入第一行驶区域103以及第二行驶区域203。即,第二车宽wv2比第一行驶路宽wl1窄,且比第二行驶路宽wl2窄。引导部65能够以使无人洒水车辆20分别进入第一行驶区域103以及第二行驶区域203的方式输出引导无人洒水车辆20的引导指令。
[0122]
[效果]
[0123]
如以上所说明的那样,根据实施方式,在作业现场的行驶路36中定义行驶区域(103、203)。基于无人车辆的车宽以及行驶区域的行驶路宽,判断无人车辆是否能够进入行驶区域。因此,抑制路宽不必要地较宽的行驶路36的修成。因此,抑制行驶路36的修成所需的成本。无人运输车辆10以及无人洒水车辆20两方行驶的第一行驶区域103与无人运输车辆10的第一车宽wv1相对应地被定义。因此,无人运输车辆10以及无人洒水车辆20分别能够在第一行驶区域103中顺畅地行驶。基于无人运输车辆10的第一车宽wv1以及无人洒水车辆20的第二车宽wv2,来定义无人运输车辆10以及无人洒水车辆20两方行驶的第一行驶区域103,且定义无人运输车辆10不行驶而无人洒水车辆20行驶的第二行驶区域203。通过分别定义第一行驶区域103以及第二行驶区域203,从而基于第一行驶区域103以及第二行驶区
域203,适当地确定无人运输车辆10以及无人洒水车辆20各自的行驶条件。因此,无人运输车辆10以及无人洒水车辆20分别能够在作业现场适当地行驶。
[0124]
判断部64在判断为车宽比行驶路宽窄的情况下,判断为无人车辆能够进入行驶区域。由此,无人车辆能够不超出行驶区域地行驶。
[0125]
即使车宽比行驶路宽窄,若无人车辆高速地在行驶区域中行驶,则从行驶区域脱离的可能性也变高。判断部64在判断为以上限速度(第一行驶速度)行驶的无人车辆不会从行驶区域脱离的情况下,判断为无人车辆能够进入行驶区域。由此,无人车辆能够不会从行驶区域脱离地高速行驶。
[0126]
判断部64在判断为即使以上限(第一行驶速度)行驶的无人车辆会从行驶区域脱离但以比上限速度低的行驶速度(第二行驶速度)行驶时不会从行驶区域脱离的情况下,判断为无人车辆能够进入行驶区域。由此,无人车辆能够不超出行驶区域地行驶。
[0127]
[其他实施方式]
[0128]
在上述的实施方式中,也可以是控制装置11的功能以及控制装置21的功能中的至少一部分设置于管理装置2,还可以是管理装置2的功能的至少一部分设置于控制装置11以及控制装置21中的一方或两方。例如,在上述的实施方式中,控制装置11也可以具有行驶区域定义部61的功能、行驶车辆定义部62的功能、行驶控制误差取得部63的功能、判断部64的功能、以及引导部65的功能。控制装置21还可以具有行驶区域定义部61的功能、行驶车辆定义部62的功能、行驶控制误差取得部63的功能、判断部64的功能、引导部65的功能、以及洒水数据生成部66的功能。
[0129]
在上述的实施方式中,行驶区域定义部61、行驶车辆定义部62、行驶控制误差取得部63、判断部64、引导部65、洒水数据生成部66、以及输出部67也可以分别由不同的硬件构成。
[0130]
在上述的实施方式中,设为第一无人车辆10为无人运输车辆,第二无人车辆20为无人洒水车辆。也可以是,第一无人车辆10以及第二无人车辆20两方为无人运输车辆。还可以是,第一无人车辆10为第一车宽的无人运输车辆,第二无人车辆20为第二车宽的无人运输车辆。
[0131]
附图标记说明:
[0132]1…
管理系统;2
…
管理装置;3
…
通信系统;3a
…
无线通信机;3b
…
无线通信机;3c
…
无线通信机;4
…
管制设施;5
…
装入机;6
…
粉碎机;7
…
供油机;8
…
供水机;9
…
输入装置;10
…
无人运输车辆(第一无人车辆);11
…
控制装置;12
…
车辆主体;13
…
行驶装置;14
…
卸料车体;15
…
传感器系统;15a
…
位置传感器;15b
…
方位传感器;15c
…
速度传感器;15d
…
障碍物传感器;16
…
车轮;16f
…
前轮;16r
…
后轮;17
…
轮胎;17f
…
前轮胎;17r
…
后轮胎;20
…
无人洒水车辆(第二无人车辆);21
…
控制装置;22
…
车辆主体;23
…
行驶装置;24
…
水箱;25
…
传感器系统;25a
…
位置传感器;25b
…
方位传感器;25c
…
速度传感器;25d
…
障碍物传感器;26
…
车轮;26f
…
前轮;26r
…
后轮;27
…
轮胎;27f
…
前轮胎;27r
…
后轮胎;28
…
洒水喷洒器;29
…
驾驶室;31
…
装入场;32
…
排土场;33
…
停车场;34
…
供油场;35
…
供水场;36
…
行驶路;37
…
交叉点;41
…
通信接口;42
…
存储电路;43
…
处理电路;51
…
车宽存储部;61
…
行驶区域定义部;62
…
行驶车辆定义部;63
…
行驶控制误差取得部;64
…
判断部;65
…
引导部;66
…
洒水数据生成部;67
…
输出部;71
…
行驶控制部;81
…
行驶控制部;82
…
洒水控制
部;101
…
路线点;102
…
行驶路线;103
…
第一行驶区域;108
…
检测位置;203
…
第二行驶区域;208
…
检测位置;wl1
…
第一行驶路宽;wl2
…
第二行驶路宽;wv1
…
第一车宽;wv2
…
第二车宽。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。