技术特征:
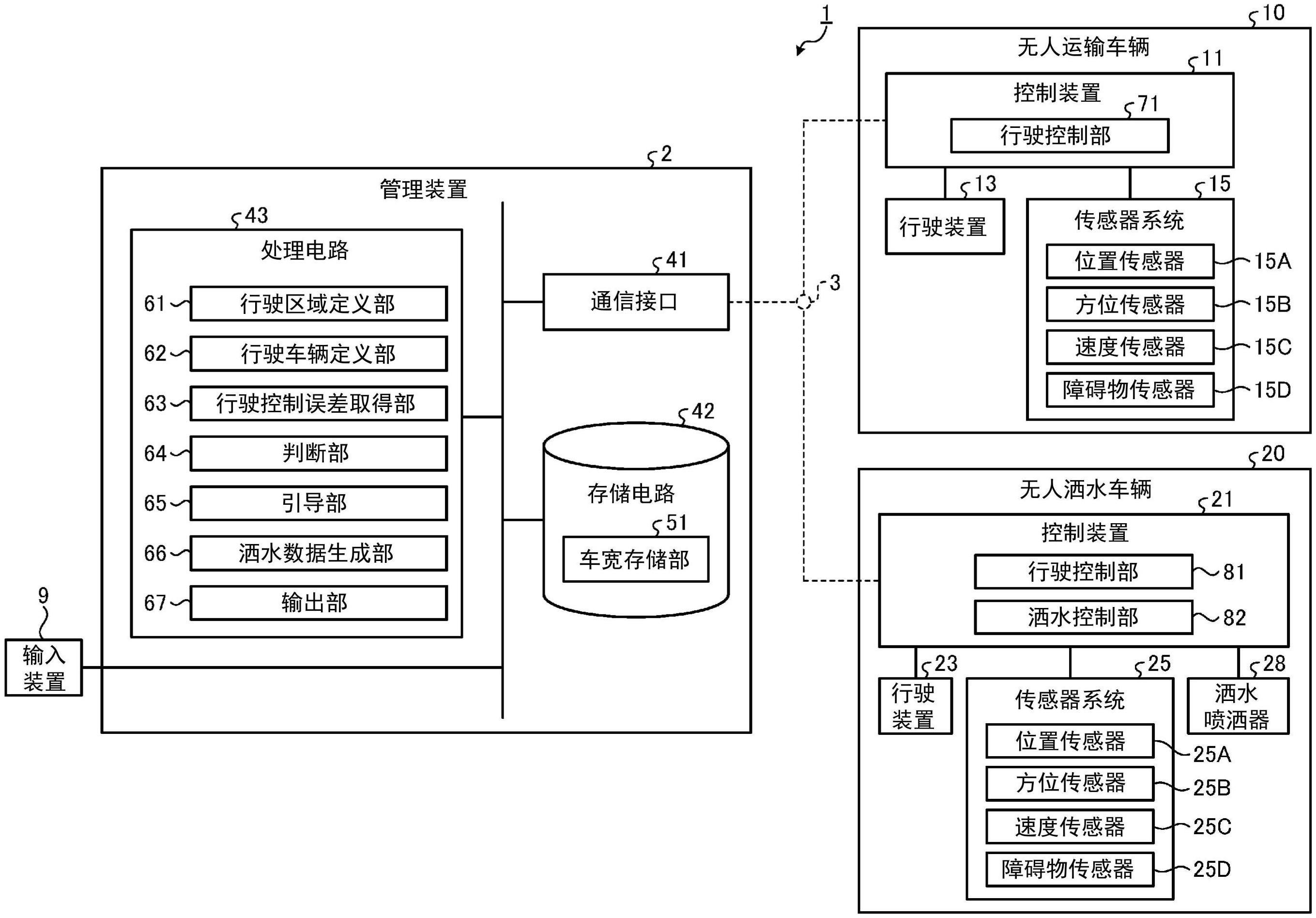
1.一种无人车辆的管理系统,其中,所述无人车辆的管理系统具备:行驶区域定义部,其在作业现场的行驶路中定义行驶区域;以及判断部,其基于表示无人车辆的宽度的车宽及表示所述行驶区域的宽度的行驶路宽,判断所述无人车辆是否能够进入所述行驶区域。2.根据权利要求1所述的无人车辆的管理系统,其中,所述判断部在判断为所述车宽比所述行驶路宽窄的情况下,判断为所述无人车辆能够进入所述行驶区域。3.根据权利要求1或2所述的无人车辆的管理系统,其中,所述无人车辆的管理系统具备行驶控制误差取得部,所述行驶控制误差取得部取得以第一行驶速度行驶的所述无人车辆的车宽方向上的位置偏移量,所述判断部在判断为以所述第一行驶速度行驶的所述无人车辆不会从所述行驶区域脱离的情况下,判断为所述无人车辆能够进入所述行驶区域。4.根据权利要求3所述的无人车辆的管理系统,其中,所述判断部在判断为即使以所述第一行驶速度行驶的所述无人车辆会从所述行驶区域脱离、但以比所述第一行驶速度低的第二行驶速度行驶时不会从所述行驶区域脱离的情况下,判断为所述无人车辆能够进入所述行驶区域。5.根据权利要求1至4中任一项所述的无人车辆的管理系统,其中,由所述行驶区域定义部定义的行驶区域包括第一行驶路宽的第一行驶区域以及比所述第一行驶路宽窄的第二行驶路宽的第二行驶区域,所述无人车辆包括第一车宽的第一无人车辆以及比所述第一车宽窄的第二车宽的第二无人车辆,所述无人车辆的管理系统具备引导部,所述引导部以使所述第一无人车辆进入所述第一行驶区域而不进入所述第二行驶区域的方式对所述第一无人车辆进行引导,且以使所述第二无人车辆分别进入所述第一行驶区域及所述第二行驶区域的方式对所述第二无人车辆进行引导。6.根据权利要求5所述的无人车辆的管理系统,其中,所述第一无人车辆是无人运输车辆,所述第二无人车辆是无人洒水车辆。7.一种无人车辆的管理方法,其中,所述无人车辆的管理方法包括如下步骤:基于表示无人车辆的宽度的车宽及表示在作业现场的行驶路中定义的行驶区域的宽度的行驶路宽,判断所述无人车辆是否能够进入所述行驶区域;在判断为所述无人车辆能够进入所述行驶区域的情况下,以进入所述行驶区域的方式对所述无人车辆进行控制;以及在判断为所述无人车辆无法进入所述行驶区域的情况下,以不进入所述行驶区域的方式对所述无人车辆进行控制。8.根据权利要求7所述的无人车辆的管理方法,其中,在判断为所述车宽比所述行驶路宽窄的情况下,判断为所述无人车辆能够进入所述行
驶区域。9.根据权利要求7或8所述的无人车辆的管理方法,其中,在基于以第一行驶速度行驶的所述无人车辆的车宽方向上的位置偏移量而判断为以所述第一行驶速度行驶的所述无人车辆不会从所述行驶区域脱离的情况下,判断为所述无人车辆能够进入所述行驶区域。10.根据权利要求9所述的无人车辆的管理方法,其中,在判断为即使以所述第一行驶速度行驶的所述无人车辆会从所述行驶区域脱离、但以比所述第一行驶速度低的第二行驶速度行驶时不会从所述行驶区域脱离的情况下,判断为所述无人车辆能够进入所述行驶区域。11.根据权利要求7至10中任一项所述的无人车辆的管理方法,其中,行驶区域包括第一行驶路宽的第一行驶区域以及比所述第一行驶路宽窄的第二行驶路宽的第二行驶区域,所述无人车辆包括第一车宽的第一无人车辆以及比所述第一车宽窄的第二车宽的第二无人车辆,所述无人车辆的管理方法包括如下步骤:以所述第一无人车辆进入所述第一行驶区域而不进入所述第二行驶区域的方式对所述第一无人车辆进行引导;以及以所述第二无人车辆分别进入所述第一行驶区域及所述第二行驶区域的方式对所述第二无人车辆进行引导。
技术总结
无人车辆的管理系统具备:行驶区域定义部,其在作业现场的行驶路中定义行驶区域;以及判断部,其基于表示无人车辆的宽度的车宽及表示行驶区域的宽度的行驶路宽,判断无人车辆是否能够进入行驶区域。是否能够进入行驶区域。是否能够进入行驶区域。
技术研发人员:山本圣 平中贵士 长川研太
受保护的技术使用者:株式会社小松制作所
技术研发日:2021.12.28
技术公布日:2023/10/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。