基于tacs系统的列车安全防护控制方法、装置及介质
技术领域
1.本发明涉及轨道列车控制技术领域,尤其涉及一种基于tacs(train autonomous crcumambulate system,列车自主运行控制系统)系统的列车安全防护控制方法、装置及介质。
背景技术:
2.tacs系统是用于列车自主申请运行路径、自主计算移动授权以及自主实现安全防护等,能够提高轨旁设备利用率的同时减少轨旁设备数量,尤其是可以明显提升列车在系统安全、智能、高效方面的作用明显提升。但是由于减少了轨旁次级检测设备,一旦列车发送异常会对整个系统的安全运行形成不可忽视的重要影响,因而必须进行相应的安全防护。
3.针对于tacs系统列车的安全防护,现有技术中主要有几下几种方式:1、为列车丢失位置建立可重叠封锁区域,控制在封锁区域内对列车进行封锁。但是该类方式不仅实现复杂,需要建立大量的可重叠封锁区域,且只能对列车丢失位置单一异常类型进行区域封锁,灵活性较差。
4.2、通过圈定障碍物防护区域以对障碍物实现安全防护,即在固定区域范围内圈定出障碍物区域,避免列车与障碍物发生碰撞。但是该类方式同样需要建立大量的障碍物区域,使得实现复杂,且同样仅能够实现单一针对障碍物类别的防护。
5.3、增加专有设备进行异常处理,当处理故障列车安全退出后释放相应的资源。该类方式必须依赖于增设专有设备,会大大增加实现成本且资源利用效率不高。
6.综上,现有技术中tacs系统列车的安全防护方式均只能实现某特定类别的防护,无法灵活应对列车在各个类别的异常问题,导致防护不全面,且实现方式往往较为复杂、成本高,同时异常处理的效率也不高。
技术实现要素:
7.本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种实现方法简单、成本低、防护效率以及全面性高、安全可靠的基于tacs系统的列车安全防护控制方法、装置及介质。
8.为解决上述技术问题,本发明提出的技术方案为:一种基于tacs系统的列车安全防护控制方法,步骤包括:oc系统实时接收列车运行过程中atp系统发送的列车信息,并根据接收到的列车信息以及oc系统与atp系统之间的通信状态判断列车的异常状态,所述异常状态包括列车故障异常状态、列车通信中断异常状态、完整性标识缺失异常状态、脱轨异常状态或障碍物碰撞列车异常状态中任意一种;当oc系统监测到列车发生异常状态时,oc系统根据最后接收到的有效信息计算列车从异常时刻开始至列车速度为0km/h列车可能运行到的位置,所述有效信息包括列车状
态信息以及线路设备状态信息;以所述列车可能运行到的位置为边界计算出限速为指定值的异常限速区域;oc系统将所述异常限速区域的信息发送给与当前oc系统通信的其他列车的atp系统,以使得其他列车自主根据所述异常限速区域的信息控制执行限速以实现安全防护。
9.进一步的,当为列车故障异常状态时,oc系统根据列车最后接收到的有效信息中安全车头ph、列车与oc系统通信中断前的速度v以及列车紧急制动加速度a计算出列车发生异常时刻开始至列车速度为0km/h后列车可能运行到的位置,并作为所述异常限速区域的终点pe,根据所述异常限速区域的终点pe以及列车的安全车尾p
t
计算得到所述异常限速区域的起点ps。
10.进一步的,所述异常限速区域内限速为0km/h,当为列车故障异常状态时,所述异常限速区域的终点pe为列车安全车头向列车运行前方延伸且延伸距离为v2/2a,所述异常限速区域的起点ps为异常限速区域的终点pe向列车运行后方回撤一个列车安全车长,即计算表达式为:表达式为:。
11.进一步的,当为列车通信中断异常状态时,oc系统根据列车最后接收到的有效信息中的安全车头ph、列车与oc系统通信中断前的速度v、列车与oc通信中断判断时间t以及列车紧急制动加速度a计算出列车发生异常时刻开始至列车速度为0km/h后列车可能运行到的位置,并作为所述异常限速区域的终点pe,根据列车安全车尾p
t
、列车与oc系统通信中断前的速度v以及列车紧急制动加速度a计算出所述异常限速区域的起点ps。
12.进一步的,所述异常限速区域内限速为0km/h,当为列车通信中断异常状态时,所述异常限速区域的终点pe为列车最后接收到的安全车头ph向列车运行前方延伸且延伸距离为 v2/2a,所述异常限速区域的起点ps为列车安全车尾p
t
向列车运行前方延伸且延伸距离为v2/2a,即计算表达式为:/2a,即计算表达式为:。
13.进一步的,当为列车完整性标识缺失异常状态或脱轨异常状态或障碍物碰撞列车异常状态时,oc系统根据列车监测出异常后最后接收到的有效信息中安全车头ph、列车发生异常时的速度v以及列车紧急制动加速度a计算出列车发生异常时刻开始至列车速度为0km/h后列车可能运行到的位置,并作为所述异常限速区域的终点pe,根据列车安全车尾p
t
计算所述异常限速区域的起点ps。
14.进一步的,所述异常限速区域内限速为0km/h,当为列车完整性标识缺失异常状态或脱轨异常状态或障碍物碰撞列车异常状态时,所述异常限速区域的终点pe为列车最后接收到的安全车头ph向列车运行前方延伸且延伸距离为v2/2a,所述异常限速区域的起点ps为列车安全车尾p
t
,即计算表达式为:,即计算表达式为:。
15.进一步的,当为脱轨异常状态或障碍物碰撞列车异常状态时,oc系统确定出所述异常限速区域后还包括:判断所述异常限速区域内的位置;如果所述异常限速区域内的位置包含一个线路正线上下行相通位置,则为相通位置整个范围的正线区域计算一个异常限速区域,以控制列车在所述安全限速区域内限速至指定值;当线路上与所述异常限速区域正线相通的区域存在两个以上物理上不连续位置区域,则控制分别为每个位置区域对应计算一个异常限速区域,形成多个异常限速区域。
16.进一步的,oc系统计算出异常限速区域后还包括将所述异常限速区域关联对应的列车id和/或异常原因。
17.进一步的,还包括异常限速区域取消控制步骤,包括:oc系统预先配置外部控制与自动控制两种方式取消异常限速区域,其中外部控制方式通过检测异常限速区域取消的输入指令,当检测到异常限速区域取消的输入指令时,控制取消异常限速区域;所述自动控制方式中通过判断与异常限速区域关联的列车是否恢复正常状态,如果恢复正常状态则控制自动取消对应的异常限速区域,并不再向与当前列车通信的其他列车发送异常限速区域的信息。
18.进一步的,还包括根据列车异常类型配置异常限速区域取消控制的方式,如果为列车故障异常类型或列车通信中断异常类型则配置外部控制以及自动控制两种方式以取消异常限速区域,如果为列车完整性标识丢失类型、脱轨异常类型、障碍物碰撞列车异常类型中任意一种则配置外部控制方式以取消异常限速区域。
19.进一步的,所述异常限速区域的信息由dms进行统一存储,且配置为断电不丢失。
20.一种列车系统安全控制方法,所述列车系统包含多辆列车,该方法步骤包括:每辆列车在运行过程中按照上述的安全防护控制方法计算异常限速区域,根据所述异常限速区域进行限速控制实现自主安全防护;每辆列车在运行过程中接收发送的异常限速区域的信息,根据自身位置与接收到的异常限速区域的信息进行限速控制实现与其他列车之间的安全防护。
21.一种基于tacs系统的列车安全防护控制装置,所述tacs系统包括atp系统以及oc系统,包括:异常状态监测模块,用于实时接收列车运行过程中atp系统发送的列车信息,并根据接收到的列车信息以及oc系统与atp系统之间的通信状态判断列车的异常状态,所述异常状态包括列车故障异常状态、列车通信中断异常状态、完整性标识缺失异常状态、脱轨异常状态或障碍物碰撞列车异常状态中任意一种;限速区域计算模块,用于当监测到列车发生异常状态时,根据oc系统最后接收到的有效信息计算列车从异常时刻开始限速为0km/h后列车可能运行到的位置,所述有效信息包括列车信息以及线路设备状态信息;以所述列车可能运行到的位置为边界计算出异常限速区域;信息发送模块,用于将所述异常限速区域的信息发送给与oc系统通信的其他列车,以使得其他正常列车自主根据所述异常限速区域的信息控制执行限速以实现安全防护。
22.一种电子设备,包括处理器以及存储器,所述存储器用于存储计算机程序,所述处理器用于执行所述计算机程序以执行如上述方法。
23.一种存储有计算机程序的计算机可读存储介质,所述计算机程序被处理器执行时实现如上述方法。
24.与现有技术相比,本发明的优点在于:1、本发明通过将列车的异常状态防护问题转换为对一定区域范围的速度防护,以异常列车可能的位置为边界自动计算并创建异常限速区域,将异常限速区域信息发送到所有与oc系统通信的列车,使得列车可以根据自身位置与异常限速区域信息实现自主安全防护,还可以实现异常列车与其他列车的安全防护,不仅能够有效降低实现复杂度、实现成本,且能够在保证安全的前提下提高系统效率。
25.2、本发明不需要增加额外的硬件设备,对异常防护区域内资源调度也不会造成影响,可以减少对异常限速区域范围内异常列车的后续处理、救援影响,保证救援所需要的资源调度,降低异常列车对tacs系统正常运行的影响。
26.3、本发明进一步综合考虑故障列车、通信中断列车、完整性丢失列车、脱轨或障碍物碰撞列车等多种异常状态,精确建立不同列车异常状态下的异常防护区域,将异常限速区域信息传输到所有列车,由各个列车根据自身位置与对应异常限速区域信息进行自主安全防护,对整个区域所有可能方向均可以实现列车的安全防护,有效保证异常列车及其他正常列车的安全。
附图说明
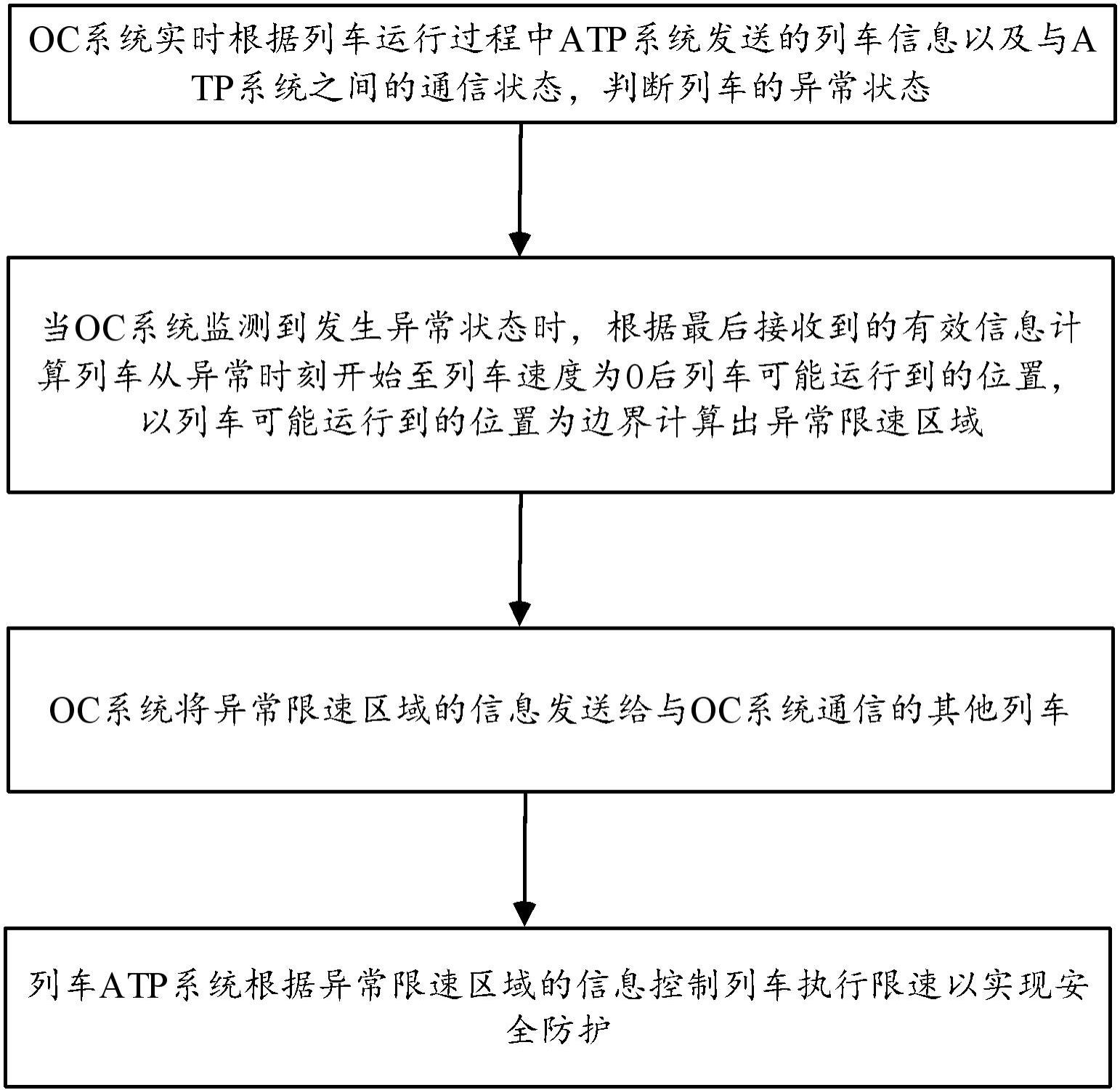
27.图1是本实施例基于tacs系统的列车安全防护控制方法的实现流程示意图。
28.图2是本发明具体应用实施例中列车故障异常状态下异常限速区域计算的原理示意图。
29.图3是本发明具体应用实施例中通信中断异常状态下异常限速区域计算的原理示意图。
30.图4是本发明具体应用实施例中完整性标识缺失异常状态下异常限速区域计算的原理示意图。
31.图5是本发明具体应用实施例中脱轨异常状态下异常限速区域计算的原理示意图。
32.图6是本发明具体应用实施例中异常限速区域表示的原理示意图。
具体实施方式
33.以下结合说明书附图和具体优选的实施例对本发明作进一步描述,但并不因此而限制本发明的保护范围。
34.如本发明公开所示,除非上下文明确提示例外情形,“一”、“一个”、“一种”和/或“该”等词并非特指单数,也可包括复数。本发明公开中使用的“第一”、“第二
”ꢀ
以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。
35.轨道列车acs系统包括ats系统(列车自动监控系统)、oc系统(object controller,轨旁资源管理器系统)、atp系统(automatic train protection,列车自动防护系统)、ato系统(列车自动运行系统)以及dms系统(data management system,数据管理系统)。在tacs系统中,由列车根据ats系统调度计划自主向oc申请轨旁资源并由atp/ato系统自主控制其运行。由oc系统作为对象控制器,实现轨旁线路资源申请、分配、释放、控制动作的管理,dms作为数据管理系统,负责全线数据版本校验及线路限速管理,dms断电线路限速信息不丢失。本实施例通过oc系统将列车的异常状态防护问题转换为对一定区域范围的速度防护,以异常列车可能的位置为边界自动计算并创建异常限速区域,将异常限速区域信息发送到所有与之通信的列车,使得列车可以根据自身位置与异常限速区域信息实现自主安全防护,还可以实现异常列车与其他列车的安全防护,可以适用于多种不同类型异常状态下的安全防护,不需要额外增设硬件设备即可以实现列车各类异常状态下的安全防护,不仅能够有效降低实现复杂度、实现成本,且能够在保证安全的前提下提高系统效率。
36.如图1所示,本实施例基于tacs系统的列车安全防护控制方法的步骤包括:步骤s01.oc系统实时接收列车运行过程中atp系统发送的列车信息,并根据接收到的列车信息以及oc系统与atp系统之间的通信状态判断列车的异常状态。
37.本实施例中,异常状态具体包括列车故障异常状态、列车通信中断异常状态、完整性标识缺失异常状态、脱轨异常状态或障碍物碰撞列车异常状态等,还可以为其他各类会导致列车丢失位置、丢失对外通信等的异常状态。具体的,当列车发生故障且与oc系统通信正常,但列车位置无效,对应为列车故障异常状态。当正常运行列车与oc系统通信中断超过预设时长时,例如中断的实际时间超过系统通信中断判断时间,对应为列车通信中断异常状态。正常运行列车与oc系统通信正常通信会发送列车完整性标识,当oc系统接收到该列车完整性标识为异常时,对应为完整性标识缺失异常状态。正常运行列车与oc系统通信正常通信的情况下,如果列车向oc系统发送列车脱轨标识或障碍物碰撞标识,则当oc系统接收到该列车脱轨标识为已脱轨以及障碍物碰撞标识时,对应为脱轨异常状态或障碍物碰撞列车异常状态。
38.可以理解的是,异常状态的具体类型可以根据实际需求增减,异常状态的具体判定方式也可以根据实际需求进行配置。
39.步骤s02.当oc系统监测到列车发生异常状态时,oc系统根据最后接收到的有效信息计算列车从异常时刻开始至列车速度为0km/h后列车可能运行到的位置,有效信息包括列车状态信息以及线路设备状态信息,列车状态信息包括列车位置、方向、速度、最大加速度、最大减速度、列车完整性以及是否脱轨等,线路设备状态信息包括轨旁道岔状态以及线路限速信息等;以列车可能运行到的位置为边界计算出限速为指定值的异常限速区域。例如列车根据轨旁道岔信息、列车位置、方向确定列车可能的运行方向和趋势,根据列车位置、方向、速度、最大加速度、最大减速度、线路限速等预测列车可能的运行范围区域。
40.本实施例中,当监测到列车状态异常,经由系统判断处于哪种列车异常状态后,由通信中断判断时间决定车地通信中断的判断,明确车地通信中断之后再基于异常列车最后有效的列车位置计算列车异常时刻开始至列车速度为0km/h后列车可能运行到的位置,形成异常限速区域,以实现对整个区域所有可能方向实现列车的安全防护。
41.本实施例中,还包括将异常限速区域关联列车id及列车异常原因,列车异常原因
不同,对应的异常限速区域计算范围不同,其范围可重叠,后续计算出异常限速区域后,根据列车自身的位置以及对应的异常限速区域进行限速控制即可实现安全防护。
42.本实施例中,全线异常限速区域的信息具体由dms进行统一存储管理,且配置为断电不丢失,进一步还可以配置在ats系统显示,断电不丢失对应的异常限速区域信息。
43.在本实施例中,针对于不同异常状态配置不同的异常区域计算方式,具体如下:1、列车故障异常状态当为列车故障异常状态时,根据列车监测出异常后最后确定的有效安全车头ph、列车与oc系统通信中断前的速度v以及列车紧急制动加速度a计算出列车发生异常时刻开始至列车速度为0km/h后列车可能运行到的位置,并作为异常限速区域的终点pe。即异常限速区域的终点pe考虑有效安全车头ph、列车与oc通信中断前的速度v以及列车紧急制动加速度a确定得到。再根据异常限速区域的终点pe以及列车的安全车尾p
t
计算得到异常限速区域的起点p
s,
,例如异常限速区域起点ps为列车可能位置的安全车尾。
44.在一个具体应用实施例中,异常限速区域内限速为0km/h,当为列车故障异常状态时,如图2所示,异常限速区域的终点pe具体为列车安全车头向列车运行前方延伸且延伸距离为v2/2a,异常限速区域的起点ps为异常限速区域的终点pe向列车运行后方回撤一个列车安全车长,即计算表达式为:(1)(2)上式(1)中pe为列车安全车头向列车运行前方延伸,延伸距离为v2/2a;上式(2)中ps即为pe向列车运行后方回撤一个列车安全车长,形成的异常限速区域描述为(ps,pe)。
45.在一个具体应用实施例中,当运行列车发生故障且与oc系统通信正常,但列车位置无效,系统判断出为列车故障异常状态后,由oc根据最后收到的有效列车信息和线路设备状态,以列车的安全位置为基准,按以列车可能运行到的位置边界照式(1)、(2)计算获得一个异常限速区域,其限速为0km/h,并设置与之关联的列车id与列车异常原因。oc再将该异常限速区域的信息发送到dms系统进行异常限速区域存盘管理,当存盘成功后该异常限速区域可在ats系统显示,且对应异常限速区域满足dms断电不丢失特性。同时该异常限速区域信息由oc发送到与之通信的所有其他列车,由其他列车根据自身位置与对应异常限速区域信息自主实现安全防护。
46.2、列车通信中断异常状态本实施例中,当为列车通信中断异常状态时,根据列车监测出异常后最后确定的有效安全车头ph、列车与oc系统通信中断前的速度v、列车与oc通信中断判断时间t以及列车紧急制动加速度a计算出异常限速区域的终点pe,根据列车安全车尾p
t
、列车与oc系统通信中断前的速度v以及列车紧急制动加速度a计算出列车发生异常时刻开始至列车速度为0km/h后列车可能运行到的位置,并作为异常限速区域的终点pe,根据列车安全车尾p
t
、列车与oc系统通信中断前的速度v以及列车紧急制动加速度a计算出异常限速区域的起点ps。即异常限速区域终点pe考虑列车安全车头ph,列车与oc通信中断前的速度v、列车与oc通信中断判断时间t以及列车紧急制动加速度a各因素计算得到,异常限速区域起点ps考虑列车安全车尾p
t
、列车与oc通信中断前的速度v以及列车紧急制动加速度a各因素计算得到。
47.在一个具体应用实施例中,异常限速区域内限速为0km/h,如图3所示,当为列车通信中断异常状态时,异常限速区域的终点pe为列车监测出异常后最后确定的有效安全车头ph向列车运行前方延伸且延伸距离为 v2/2a,异常限速区域的起点ps为列车安全车尾p
t
向列车运行前方延伸且延伸距离为v2/2a,即计算表达式为:(3)(4)上式(3)中pe即为ph向列车运行前方延伸,延伸距离为 v2/2a;上式(4)中ps即为p
t
向列车运行前方延伸,延伸距离为v2/2a,则异常限速区域描述为(ps,pe)。
48.在一个具体应用实施例中,当正常运行列车与oc系统通信中断的实际时间超过系统通信中断判断时间后,系统判断到发生列车通信中断异常,oc根据最后收到的列车信息和线路设备状态,以列车的安全位置为基准,以列车可能运行到的位置边界按照式(3)、(4)获得一个异常限速区域,其限速为0km/h,并设置与之关联的列车id与列车异常原因。oc将该区域发送到dms系统进行异常限速区域存盘管理,当存盘成功后该异常限速区域可在ats系统显示,且对应异常限速区域满足dms断电不丢失特性。同时该异常限速区域信息由oc发送到与之通信的所有其他列车,由其他列车根据自身位置与对应异常限速区域信息自主实现安全防护。
49.3、完整性标识缺失异常状态本实施例中,当为列车完整性标识缺失异常状态时,根据列车监测出异常后最后确定的有效安全车头ph、列车发生异常时的速度v以及列车紧急制动加速度a计算出异常限速区域的终点pe,根据列车安全车尾p
t
计算出列车发生异常时刻开始至列车速度为0km/h后列车可能运行到的位置,并作为异常限速区域的终点pe。即异常限速区域终点pe考虑列车安全车头ph,列车完整性标识异常时的速度v以及列车紧急制动加速度a各因素计算得到。根据列车安全车尾p
t
计算异常限速区域的起点ps,例如将异常限速区域起点ps作为列车安全车尾p
t
。
50.在一个具体的应用实施例中,异常限速区域内限速为0km/h,如图4所示,异常限速区域的终点pe为列车监测出异常后最后确定的有效安全车头ph向列车运行前方延伸且延伸距离为v2/2a,异常限速区域的起点ps为列车安全车尾p
t
,即计算表达式为:(5)(6)上式(5)中pe即为ph向列车运行前方延伸,延伸距离为 v2/2a;上式(4)中ps即为p
t
向列车运行前方延伸,延伸距离为v2/2a,形成异常限速区域描述为(ps,pe)。
51.在具体应用实施例中,当正常运行列车与oc系统通信正常通信并发送列车完整性标识,当oc收到该列车完整性标识为异常时,系统判断发生完整性标识缺失异常,oc根据收到该数据时列车信息和线路设备状态,以列车的安全位置为基准,以列车可能运行到的位置边界按照式(5)、(6)计算获得一个异常限速区域,其限速为0km/h,并设置与之关联的列车id与列车异常原因。oc将该区域发送到dms系统进行异常限速区域存盘管理,当存盘成功后该异常限速区域可在ats系统显示,且对应异常限速区域满足dms断电不丢失特性。同时
该异常限速区域信息由oc发送到与之通信的所有其他列车,由其他列车根据自身位置与对应异常限速区域信息自主实现安全防护。
52.4、脱轨或障碍物碰撞异常状态当为脱轨或障碍物碰撞异常状态时,异常限速区域计算方式与完整性标识缺失类型类似,不同之处在于脱轨或障碍物碰撞异常状态下可能会存在一个或多个异常限速区域。本实施例中,当为脱轨异常状态或障碍物碰撞列车异常状态时,确定出异常限速区域后还包括:判断异常限速区域内的位置;如果异常限速区域内的位置包含一个线路正线上下行相通位置,则为相通位置整个范围的正线区域计算一个异常限速区域,以控制列车在安全限速区域内限速至指定值;当线路上与异常限速区域正线相通的区域存在两个以上物理上不连续位置区域,则控制分别为每个位置区域对应计算一个异常限速区域,形成多个异常限速区域。
53.在一个具体应用实施例中,如图5所示,异常限速区域内限速为0km/h,列车最后有效安全车头为ph,安全车尾为p
t
,当发生脱轨或障碍物碰撞异常时,第一个异常限速区域的起点ps为列车安全车尾p
t
,第一个异常限速区域的终点pe考虑以下元素计算得到:列车最后的有效安全车头ph、列车脱轨标识异常时的速度v以及列车紧急制动加速度a,计算公式为:(7)(8)上式(7)中第一个异常限速区域的终点pe为列车安全车头向列车运行前方延伸,延伸距离为v2/2a,形成异常限速区域描述为(ps,pe)。进一步计算出与第一异常限速区域(ps,pe)正线想通的n个异常限速区域分别描述为(p
s1
,p
e1
)、
……
、(p
sn
,p
en
)。
54.在具体应用实施例中,以脱轨异常状态为例,当正常运行列车与oc系统通信正常通信并发送列车脱轨标识,oc收到该列车脱轨标识为已脱轨后,系统判断发生脱轨异常,根据收到该数据时列车信息和线路设备状态,以列车的安全位置为基准,以列车可能运行到的位置边界按照式(7)、(8)计算获得一个异常限速区域,其限速为0km/h。同时判断该异常限速区域内位置,当异常限速区域位置包含线路正线一个上下行相通位置时,将所相通位置整个范围正线区域另计算为一个安全异常限速区域,其限速为0km/h;当线路上与第一个异常限速区域正线相通的区域存在n个物理上不连续位置区域,则另计算为n个异常限速区域,异常限速区域限速同样为0km/h。所有计算的异常限速区域均设置与之关联的列车id与列车异常原因。oc将所有n个异常限速区域依次发送到dms系统进行异常限速区域存盘管理,当存盘成功后对应异常限速区域可在ats系统显示,且对应异常限速区域满足dms断电不丢失特性。同时所有异常限速区域信息由oc发送到与之通信的所有其他列车,由其他列车根据自身位置与对应异常限速区域信息自主实现安全防护。
55.如图6所示,n表示异常限速区域包含的seg数量,当n为1时,异常限速区域的表示为:[segid1 offset
11
]、[segid1 offset
12
],其中只有一个segid1,其上包含两个不同的位置 offset
11
,offset
12
。当n为2时,异常限速区域的表示为:[segid1 offset1]、[segid2 offset2],其中包含两个seg,没有中间seg。当n大于2时,则异常限速区域的表示为:[segid1 offset1]、[segid2]、
……
、[segid
n-1
]、[segidn offsetn]。其中[segid1 offset1]表示异
常限速区域起点位置,[segidn offsetn]表示异常限速区域终点位置,[segid2]到[segid
n-1
]表示异常限速区域中间包含的seg。线路按照一定原则划分线路,划分后的部分定义为seg,具有唯一segid,seg上某一点以seg offset进行唯一确定。
[0056]
可以理解的是,上述各异常状态下异常限速区域起点、终点的也可以根据实际需求采用其他的计算公式实现。例如,所有列车异常状态的异常限速区域起点ps均可以简单的计算为列车安全车尾p
t
即:,这样可以保证一个足够安全的异常限速区域起始范围,只是可能因范围较大会一定程度上影响列车运行的效率,适用于对列车运行效率不高的场合。
[0057]
步骤s03.oc系统将异常限速区域的信息发送给与oc系统通信的其他列车。
[0058]
本实施例中,确定出异常限速区域后,会将所有异常限速区域信息由oc发送到与之通信的所有其他列车,使得其他各列车可以根据自身位置与对应异常限速区域信息自主实现安全防护。
[0059]
步骤s04.列车atp系统根据异常限速区域的信息控制列车执行限速以实现安全防护。
[0060]
列车发生异常按照步骤s02计算出异常限速区域后,控制列车在异常限速区域降速为0km/h,实现自主安全防护。同时其他各列车在运行过程中,会接收oc发送的各异常限速区域的信息,atp系统根据自身位置与异常限速区域之间的位置关系进行判断,如果处于异常限速区域则控制降速为0km/h,从而实现与其他列车之间的安全防护。
[0061]
本实施例中异常限速区域内的限速具体为0km/h,可以理解的是,异常限速区域内的限速值也可以根据实际需求配置为其他值,例如接近于0的值。
[0062]
本实施例异常限速区域的计算以及发送是由oc系统完成,可以理解的是,当然也可以配置有其他设备来进行计算以及发送,甚至可以直接由列车内部模块实现,具体可以根据实际需求配置。
[0063]
本实施例中,还包括异常限速区域取消控制步骤,包括:oc系统预先配置外部控制与自动控制两种方式取消异常限速区域,其中外部控制方式通过检测异常限速区域取消的输入指令,当检测到异常限速区域取消的输入指令时,控制取消异常限速区域;自动控制方式中通过判断与异常限速区域关联的列车是否恢复正常状态,如果恢复正常状态则控制自动取消对应的异常限速区域,并不再向与当前列车通信的其他列车发送异常限速区域的信息,从而可以精细化管理使得部分条件下可以自动取消异常防护区域,在列车异常恢复正常后恢复列车的正常运行。
[0064]
本实施例中,进一步还包括根据列车异常类型配置异常限速区域取消控制的方式,如果为列车故障异常类型或列车通信中断异常类型则配置外部控制以及自动控制两种方式以取消异常限速区域,如果为列车完整性标识丢失类型、脱轨异常类型、障碍物碰撞列车异常类型中任意一种则配置外部控制方式以取消异常限速区域,以根据不同异常类型的重要或影响程度配置不同的取消方式。
[0065]
在具体应用实施例中,为异常限速区域的取消配置人工与oc自动取消两种方式,根据列车的不同异常状态配置不同的取消方式,所有异常限速区域信息均可在确认列车异常对系统影响恢复后由人工在ats系统取消。各异常类型具体按照下述方式配置异常限速区域取消控制方式:
(1)列车故障异常类型的限速区域取消:配置为可在ats界面上人工取消,由ats将异常限速区域取消信息发送到dms进行删除,当dms删除上述异常限速区域信息后,将该异常限速区域取消信息发送到oc,oc不再向与之通信的所有其他列车发送该异常限速区域信息,其他列车根据实际情况自主调整安全防护策略。
[0066]
oc根据异常限速区域关联的列车id与列车异常原因进行判断,当上述列车id重新向oc发送有效位置信息,则oc自动取消该异常限速区域,oc将该区域取消信息发送到dms系统进行删除,同时oc不再向与之通信的所有其他列车发送该异常限速区域信息,其他列车根据实际情况自主调整安全防护策略。
[0067]
(2)列车通信中断异常类型的限速区域取消:配置为如列车故障异常类型相同的,在ats界面上人工取消,取消操作一致。oc根据异常限速区域关联的列车id与列车异常原因进行判断,当上述列车id与oc重新建立通信连接且列车向oc发送有效位置信息,则oc自动取消该异常限速区域,oc将该区域取消信息发送到dms系统进行删除,同时oc不再向与之通信的所有其他列车发送该异常限速区域信息,其他列车根据实际情况自主调整安全防护策略。
[0068]
(3)完整性标识丢失异常类型的限速区域取消配置为如列车故障异常类型相同的,在ats界面上人工取消,取消操作一致。oc不可自动取消该异常限速区域。
[0069]
(4)脱轨或障碍物碰撞异常类型的限速区域取消配置为如列车故障异常类型相同的,在ats界面上人工取消,取消操作一致,但人工操作一次只能取消一个异常限速区域。oc不可自动取消对应异常限速区域。
[0070]
本实施例针对基于tacs系统的列车异常状态下的安全防护,通过将列车的异常状态防护问题转换为对一定范围的速度防护,综合考虑故障列车、通信中断列车、完整性丢失列车、脱轨或障碍物碰撞列车等多种异常状态,根据异常列车最后可信安全位置并结合线路状态,计算列车可能运行到的位置边界,精确建立了不同列车异常状态下的异常防护区域,其中脱轨或障碍物碰撞情况下可能存在多个异常限速区域,将异常限速区域信息传输到所有列车,由各个列车根据自身位置与对应异常限速区域信息进行自主安全防护,从而对整个区域所有可能方向均可以实现列车的安全防护,保证异常列车及其他正常列车的安全。同时不需要增加硬件设备,异常防护区域内资源调度也不受影响,例如异常限速区域对其范围内的轨旁设备等的操作不会产生影响,还可以减少对异常限速区域范围内异常列车的后续处理、救援影响,保证救援所需要的资源调度,在保证列车安全的前提下提高了系统效率,降低了异常列车对tacs系统正常运行的影响。
[0071]
本实施例还提供列车系统安全控制方法,列车系统包含多辆列车,该方法步骤包括:每辆列车按照上述安全防护控制方法计算异常限速区域,根据异常限速区域进行限速控制实现自主安全防护;每辆列车接收oc系统发送的其他列车异常限速区域的信息,根据接收到的异常限速区域的信息进行限速控制实现与其他列车之间的安全防护。
[0072]
本实施例基于tacs系统的列车安全防护控制装置, tacs系统包括atp系统以及oc
系统,包括:异常状态监测模块,用于实时接收列车运行过程中atp系统发送的列车信息,并根据接收到的列车信息以及oc系统与atp系统之间的通信状态判断列车的异常状态,异常状态包括列车故障异常状态、列车通信中断异常状态、完整性标识缺失异常状态、脱轨异常状态或障碍物碰撞列车异常状态等;限速区域计算模块,用于当监测到列车发生异常状态时,根据oc系统最后接收到的有效信息计算列车从异常时刻开始限速为0km/h后列车可能运行到的位置,所述有效信息包括列车信息以及线路设备状态信息;以所述列车可能运行到的位置为边界计算出异常限速区域;信息发送模块,用于将所述异常限速区域的信息发送给与oc系统通信的其他列车,以使得其他正常列车自主根据所述异常限速区域的信息控制执行限速以实现安全防护。
[0073]
本实施例基于tacs系统的列车安全防护控制装置与上述基于tacs系统的列车安全防护控制方法一一对应,在此不再一一赘述。
[0074]
本实施例还提供电子设备,包括处理器以及存储器,存储器用于存储计算机程序,处理器用于执行计算机程序以执行如方法。
[0075]
可以理解的是,本实施例上述方法可以由单个设备执行,例如一台计算机或服务器等,也可以应用于分布式场景下由多台设备相互配合来完成,在分布式场景的情况下,多台设备中的一台设备可以只执行本实施例上述方法中的某一个或多个步骤,多台设备之间进行交互以完成上述方法。处理器可以采用通用的cpu、微处理器、应用专用集成电路、或者一个或多个集成电路等方式实现,用于执行相关程序,以实现本实施例上述方法。存储器可以采用只读存储器rom、随机存取存储器ram、静态存储设备以及动态存储设备等形式实现。存储器可以存储操作系统和其他应用程序,在通过软件或者固件来实现本实施例上述方法时,相关的程序代码保存在存储器中,并由处理器来调用执行。
[0076]
本实施例进一步提供存储有计算机程序的计算机可读存储介质,计算机程序被处理器执行时实现如上述方法。
[0077]
本领域内的技术人员应明白,本技术的上述实施例可提供为方法、系统、或计算机程序产品。因此,本技术可采用完全硬件实施例、完全软件实施例、或结合软件和硬件方面的实施例的形式。而且,本技术可采用在一个或多个其中包含有计算机可用程序代码的计算机可读存储介质(包括但不限于磁盘存储器、cd-rom、光学存储器等)上实施的计算机程序产品的形式。本技术是参照根据本技术实施例的方法、设备(系统)、和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方
框中指定的功能。这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
[0078]
上述只是本发明的较佳实施例,并非对本发明作任何形式上的限制。虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。