1.本发明属于无人机技术领域,尤其涉及一种创建无人机航线的方法。
背景技术:
2.站场对天然气长输管线的正常运行有着重要作用,需要日常巡检来及时发现并清除站场可能存在的安全隐患,保证输气管线的稳定和安全运行。
3.现阶段大部分站场为有人值守状态,管理人员需要进行日常巡检来维护站场的运行。部分无人值守的站场通过定期人工巡检,或者无人机进行日常巡检。
4.现阶段使用无人机进行站场巡检的方案主要通过人工操作无人机在站场内部飞行,对固定目标进行定向拍照,然后把航线录制并保存下来,后续通过反复执行录制的航线对站场的固定目标拍照,最后通过照片分析来对站场进行巡检。现有的方案中,使用无人机进行站场巡检需要人工操控无人机在站场内飞行并录制航线,这个过程耗时耗力。由于录制的航线通常需要在站场内穿梭,这要求无人机的定位精度至少要达到亚米级。但是无人机定位通常依赖gps,很可能受天气影响,导致定位精度下降,有可能会碰撞站场内的设备造成坠机等安全事故。定位精度下降还会造成拍照的位置和角度不合适,巡检目标没有正确获取,导致巡检失败。
技术实现要素:
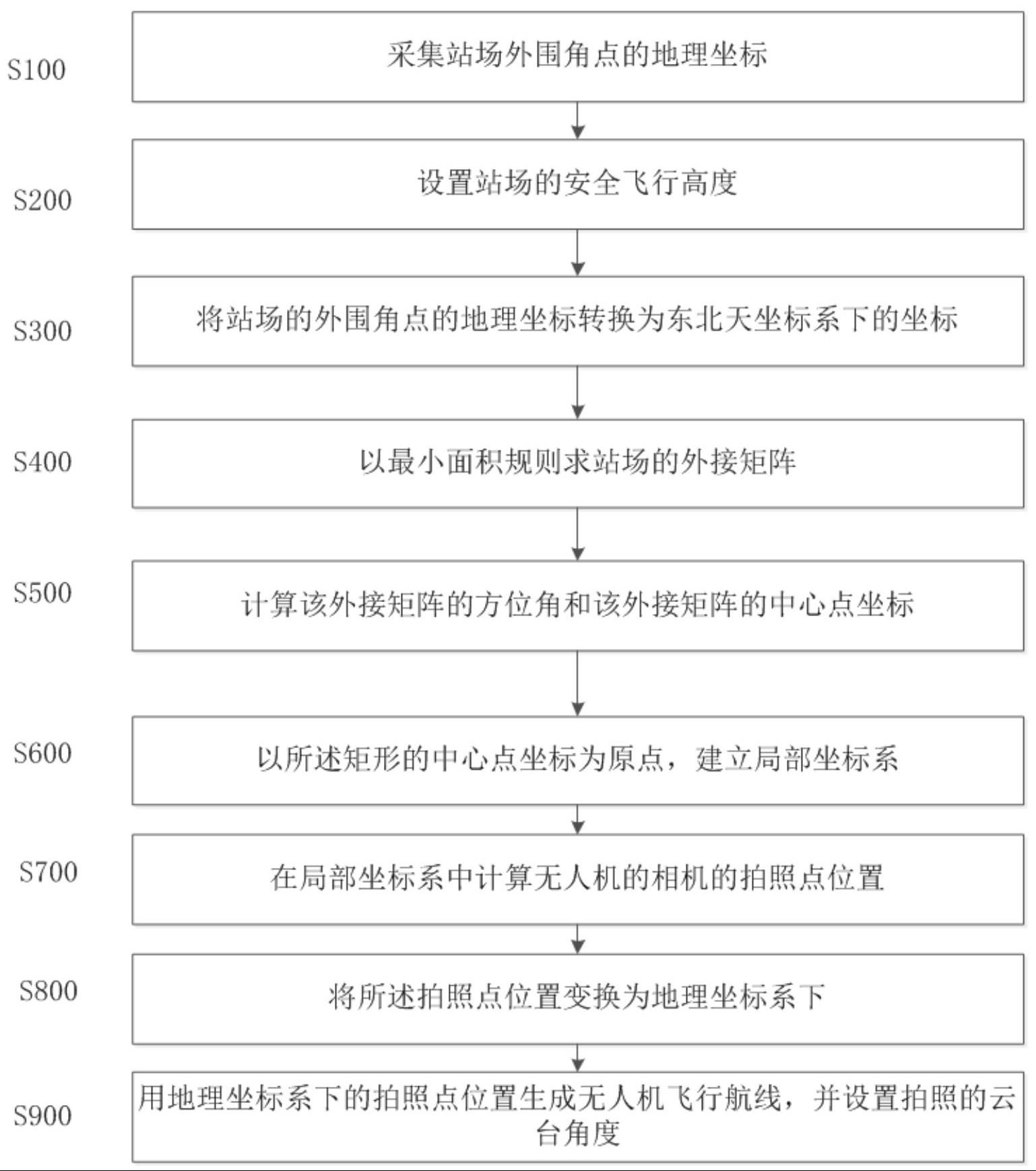
5.为了解决上述技术问题,本发明揭示了一种创建无人机航线的方法,所述方法包括如下步骤:
6.s100:采集站场外围角点的地理坐标;
7.s200:设置站场的安全飞行高度;
8.s300:将站场的外围角点的地理坐标转换为东北天坐标系下的坐标;
9.s400:以最小面积规则求站场的外接矩阵;
10.s500:计算该外接矩阵的方位角和该外接矩阵的中心点坐标;
11.s600:以所述外接矩形的中心点坐标为原点,建立局部坐标系;
12.s700:在局部坐标系中计算无人机的相机的拍照点位置;
13.s800:将所述拍照点位置变换为地理坐标系下;
14.s900:用地理坐标系下的拍照点位置生成无人机飞行航线,并设置拍照的云台角度。
15.通过上述技术方案,本发明针对无人站场巡检,提供了一种简单有效而且安全的创建无人机航线的方法,只需要简单的输入角点坐标和安全高度即可。本发明生成的航线能够从站场的前、后、左、右四个方向全面覆盖内部的设施,整个航线过程中无人机始终处于安全高度以上,不存在碰撞风险,而且不会因为站内内部目标移动或者增减而需要重新设定航线。本发明可以有效减少巡检相关的管理工作,为企业降低站场维护和管理成本。
附图说明
16.图1是本发明一个实施例中所提供的一种创建无人机航线的方法流程图;
17.图2是本发明一个实施例中所提供的站场外围角点坐标示意图;
18.图3是本发明一个实施例中所提供的站场的外接矩阵示意图;
19.图4是本发明一个实施例中所提供的局部坐标系示意图;
20.图5是本发明一个实施例中所提供的在局部坐标系中计算无人机的相机的拍照点位置的流程图;
21.图6是本发明一个实施例中所提供的变焦照片横向和纵向的数量示意图;
22.图7是本发明一个实施例中所提供的投影矩阵示意图;
23.图8是本发明一个实施例中所提供的以广角相机的视场角fov计算全景图的拍照距离的示意图。
具体实施方式
24.为了使本领域技术人员理解本发明所披露的技术方案,下面将结合实施例及有关附图1至图8,对各个实施例的技术方案进行描述,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。
25.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本发明的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其他实施例互斥的独立的或备选的实施例。本领域技术人员可以理解的是,本文所描述的实施例可以与其他实施例相结合。
26.参见图1,在一个实施例中,本发明揭示了一种创建无人机航线的方法,所述方法包括如下步骤:
27.s100:采集站场外围角点的地理坐标;
28.s200:设置站场的安全飞行高度;
29.s300:将站场的外围角点的地理坐标转换为东北天坐标系下的坐标;
30.s400:以最小面积规则求站场的外接矩阵;
31.s500:计算该外接矩阵的方位角和该外接矩阵的中心点坐标;
32.s600:以所述外接矩形的中心点坐标为原点,建立局部坐标系;
33.s700:在局部坐标系中计算无人机的相机的拍照点位置;
34.s800:将所述拍照点位置变换为地理坐标系下;
35.s900:用地理坐标系下的拍照点位置生成无人机飞行航线,并设置拍照的云台角度。
36.就该实施例而言,该方法采用自动规划飞行航线的方式,无人机分别在站场前后左右四个方向矩阵式拍照(至少包含一张全景图和若干变焦高清倾斜影像),最终可建立图像金字塔,形成对站场360
°
全面覆盖的影像集。后续管理人员只需要对图像矩阵进行查看,即可实现对站场各个模板的巡检。
37.采集站场外围角点的地理坐标,如图2中p1、p2、p3和p4,可以在地图上直接获取坐标,也可以通过rtk打点器,或者其他类似的设备获取地理坐标。
38.设置站场的安全飞行高度hs。此高度hs需要比站场内的所有设备的最高点高出一
定距离(例如高20米)。例如hs=50米。
39.以最小面积规则求站场的外接矩阵,如图3中矩形abcd,坐标轴e表示东向,n表示北向。矩阵的宽度为w,为图3中线段ad的长度,高度为h,为图3中线段ab长度。
40.如图3所示,获取矩阵左下角点a,以点a为原点,计算矩阵的方位角az(线段ab与正北方向的夹角,角度单位为弧度),计算矩阵的中心点坐标pc=[xc,yc,zc](pc为a、b、c、d四点坐标的平均值)。
[0041]
如图4所示,以矩形中心为原点,建立局部坐标系,坐标系x和y轴与矩阵的边平行。
[0042]
s300中把地理坐标转换到一个局部的笛卡尔坐标,方便后续处理。
[0043]
东北天坐标系的轴向是固定的,局部坐标系轴向跟矩形边平行。局部坐标系可以转换为东北天坐标系。建立局部坐标系简化数学运算,处理方便。巡检的方法就是以特定的角度去拍摄站场内部的某些特定的目标。无人机的航线必须使用地理坐标系下的坐标。没有航线无人机无法起飞和拍照。云台角度是调整无人机相机的拍照角度,否则无法拍摄到预定的目标。
[0044]
在另一个实施例中,所述东北天坐标系为:x轴指向东,y轴指向北,z轴指向天的笛卡尔坐标系。
[0045]
在另一个实施例中,所述局部坐标系是由东北天坐标系绕z轴旋转-az,然后原点平移pc得到,其中az表示外接矩阵的方位角,pc表示外接矩阵的中心点坐标。
[0046]
在另一个实施例中,所述步骤s700中进一步包括:
[0047]
s701:计算站场的地面轮廓外接矩形在无人机的相机坐标系下的投影矩阵;
[0048]
s702:以广角相机的视场角fov计算全景图的拍照距离和全景照片的拍照点位置;
[0049]
s703:根据变焦照片的地面分辨率gsd,计算变焦照片横向和纵向的数量;
[0050]
s704:将矩阵分块,以变焦相机的参数计算变焦照片的拍照点位置;
[0051]
s705:将上述全景图和变焦照片的拍照点位置变换到东北天坐标系下。
[0052]
就该实施例而言,该流程如图5所示,以无人机在站场的前向为例。
[0053]
步骤s704中将矩阵分成m*n块,以变焦相机的参数计算变焦照片的拍摄点位置和视点位置(i=1,2,...m*n)。流程与步骤s701-s703类似。
[0054]
步骤s705中将上述广角和变焦拍照点位置变换到enu坐标系,使用欧拉角(欧拉角的顺序为zxy)计算旋转矩阵r,pc为偏移向量。则enu坐标系下的坐标为,视点坐标为。
[0055]
步骤s703,如图6所示,将目标范围划分成8行7列个拍照目标。全景图是广角相机拍的。变焦相机是为了拍照细节照片,使目标更清晰。无人机的相机包括两个相机:广角相机和变焦相机。全景照片的范围大,分辨率低。变焦照片可以把目标拉近,拍照范围小,分辨率高。
[0056]
在另一个实施例中,所述步骤s701中的投影矩阵的宽,高度,其中,为无人机的相机主轴相对地面的仰角。
[0057]
就该实施例而言,如图7所示,投影形状同样为矩阵,矩阵的宽,高度
,其中为相机主轴相对地面的仰角(可以理解为拍照角度),p、q、p’为该角度的示意图中的三个点,o为相机的中心,其中,p’、q和o还用于图8所示的视场角fov的示意。
[0058]
在另一个实施例中,所述步骤s702中的全景照片的拍照点位置表示为,其中为全景图的拍照距离。
[0059]
就该实施例而言,比较和安全飞行高度,如果,则。计算全景照片的拍摄点位置,相机视点(相机主光轴与拍照平面的交点)的坐标为。
[0060]
在另一个实施例中,如果,则,其中hs表示站场的安全飞行高度,为无人机的相机主轴相对地面的仰角。
[0061]
在另一个实施例中,所述步骤s702中进一步包括:
[0062]
s7021:计算投影矩阵的宽高比;
[0063]
s7022:如果所述投影矩阵的宽高比相机ccd的宽高比的值大,则使用宽度和水平视场角计算全景图的拍照距离;否则使用高度和垂直视场角计算全景图的拍照距离。
[0064]
就该实施例而言,计算投影矩阵的宽高比,然后和相机ccd的宽高比进行比较;以广角相机的视场角fov计算全景图的拍摄距离,如图8所示,o为相机坐标系的原点。如果矩阵的宽高比比ccd的值大,则使用宽度和水平视场角进行计算;否则使用高度和垂直视场角进行计算:。
[0065]
在另一个实施例中,所述步骤s703中横向数量,纵向数量,其中,h为外接矩阵的高度,w为外接矩阵的宽度,为照片对应的地面尺寸的长度,为照片对应的地面尺寸的宽度。
[0066]
就该实施例而言,设置照片的地面分辨率gsd(例如每个像素对应地面1cm),根据ccd分辨率(长*宽为hr*wr)计算单张照片对应的地面尺寸,长度为hp=hr*gsd,宽度wp=wr*gsd,计算矩阵分块的数量m和n,其中,。
[0067]
在另一个实施例中,所述步骤s900中进一步包括:
[0068]
s901:将所得到东北天坐标系下前后左右四个方向的拍照点位置换为地理坐标;
[0069]
s902:按点位顺序生成无人机飞行航线;其中,前、左、后、右每个方向的航点采用相同的拍照角度,对应的云台角度为,roll为云台的滚转角,pitch为云台的俯仰角,yaw为云台的偏航角。
[0070]
就该实施例而言,计算得到enu坐标系下前后左右四个方向的拍照点位置以后,将
坐标转和换为地理坐标,对应为和,然后按点位顺序生成无人机飞行航线,前、左、后、右每个方向的航点采用相同的拍照角度,对应的云台角度为,其中roll=0,pitch=-,yaw=(i=0、1、2、3,对应前、左、后、右四个方向)。
[0071]
通过上述技术方案,本发明针对无人站场巡检,提供了一种简单有效而且安全的创建无人机航线的方法,只需要简单的输入角点坐标和安全高度即可。本发明生成的航线能够从站场的前、后、左、右四个方向全面覆盖内部的设施,整个航线过程中无人机始终处于安全高度以上,不存在碰撞风险,而且不会因为站内内部目标移动或者增减而需要重新设定航线。本发明可以有效减少巡检相关的管理工作,为企业降低站场维护和管理成本。
[0072]
最后,需要说明的是,本领域的普通技术人员在本说明书的启示下和在不脱离本发明权利要求所保护的范围的情况下,还可以做出很多种的形式变化,这些均属于本发明保护之列。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。