技术特征:
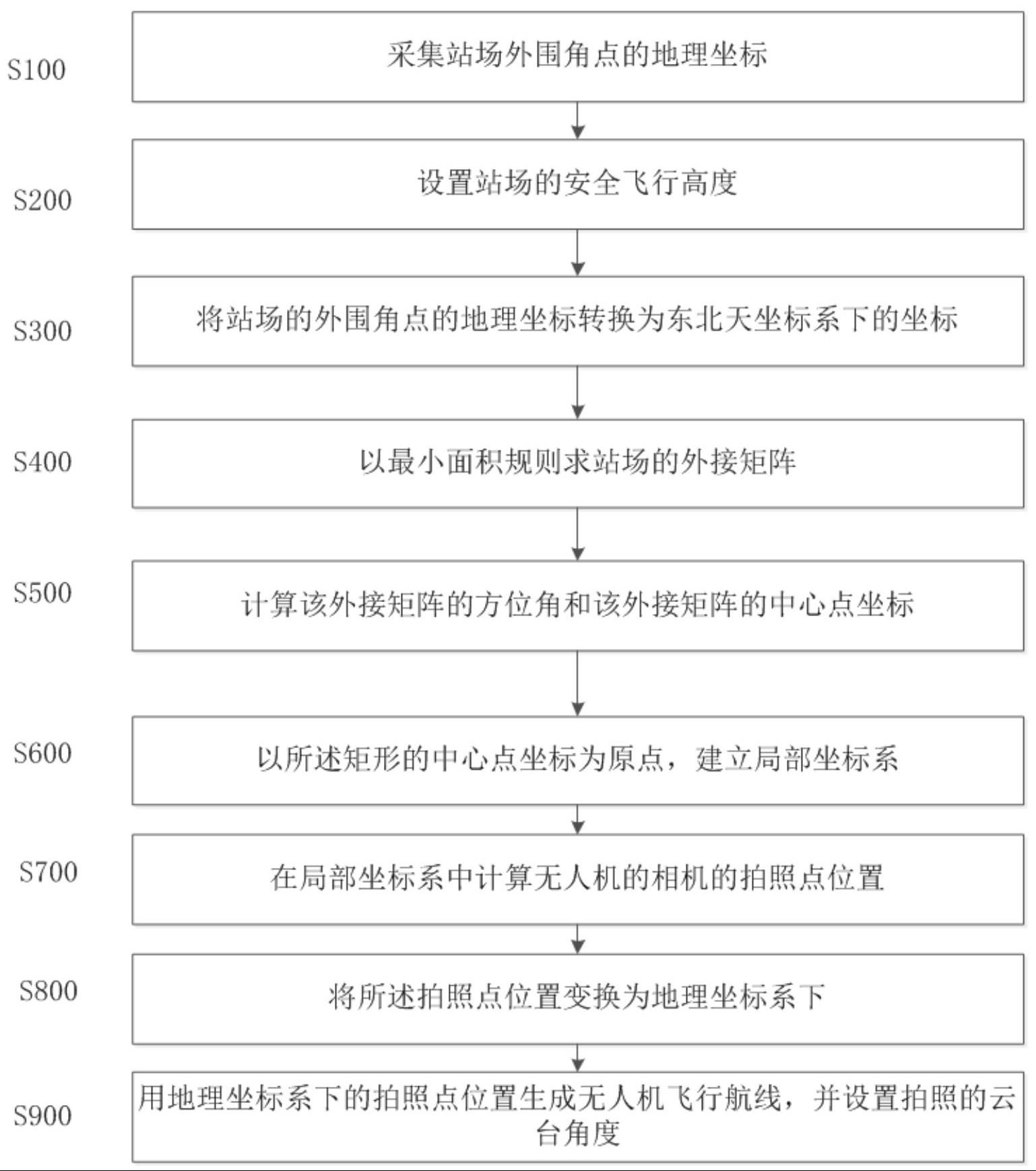
1.一种创建无人机航线的方法,其特征在于,所述方法包括如下步骤:s100:采集站场外围角点的地理坐标;s200:设置站场的安全飞行高度;s300:将站场的外围角点的地理坐标转换为东北天坐标系下的坐标;s400:以最小面积规则求站场的外接矩阵;s500:计算该外接矩阵的方位角和该外接矩阵的中心点坐标;s600:以所述外接矩形的中心点坐标为原点,建立局部坐标系;s700:在局部坐标系中计算无人机的相机的拍照点位置;s800:将所述拍照点位置变换为地理坐标系下;s900:用地理坐标系下的拍照点位置生成无人机飞行航线,并设置拍照的云台角度。2.如权利要求1所述的方法,其特征在于,所述东北天坐标系为:x轴指向东,y轴指向北,z轴指向天的笛卡尔坐标系。3.如权利要求1所述的方法,其特征在于,当pc表示外接矩阵的中心点坐标、az表示外接矩阵的方位角时,所述局部坐标系是由东北天坐标系绕z轴旋转-az,然后原点平移pc得到。4.如权利要求1所述的方法,其特征在于,所述步骤s700中进一步包括:s701:计算站场的地面轮廓外接矩形在无人机的相机坐标系下的投影矩阵;s702:以广角相机的视场角fov计算全景图的拍照距离和全景图的拍照点位置;s703:根据变焦照片的地面分辨率gsd,计算变焦照片横向和纵向的数量;s704:将矩阵分块,以变焦相机的参数计算变焦照片的拍照点位置;s705:将上述全景图和变焦照片的拍照点位置变换到东北天坐标系下。5.如权利要求4所述的方法,其特征在于,所述步骤s701中的投影矩阵的宽,高度,其中,为无人机的相机主轴相对地面的仰角,h为外接矩阵的高度,w为外接矩阵的宽度。6.如权利要求4所述的方法,其特征在于,所述步骤s702中的全景照片的拍照点位置表示为,其中为全景图的拍照距离。7.如权利要求6所述的方法,其特征在于,如果,则,其中hs表示站场的安全飞行高度,为无人机的相机主轴相对地面的仰角。8.如权利要求4所述的方法,其特征在于,所述步骤s702中进一步包括:s7021:计算投影矩阵的宽高比;s7022:如果所述投影矩阵的宽高比相机ccd的宽高比的值大,则使用宽度和水平视场角计算全景图的拍照距离;否则使用高度和垂直视场角计算全景图的拍照距离。9.如权利要求4所述的方法,其特征在于,所述步骤s703中横向数量,纵向数量,其中,h为外接矩阵的高度,w为外接矩阵的宽度,为照片对应的地面尺寸的长
度,为照片对应的地面尺寸的宽度。10.如权利要求1所述的方法,其特征在于,所述步骤s900中进一步包括:s901:将所得到东北天坐标系下前后左右四个方向的拍照点位置换为地理坐标;s902:按点位顺序生成无人机飞行航线;其中,前、左、后、右每个方向的航点采用相同的拍照角度,对应的云台角度为,roll为云台的滚转角,pitch为云台的俯仰角,yaw为云台的偏航角。
技术总结
一种创建无人机航线的方法,包括:S100:采集站场外围角点的地理坐标;S200:设置站场的安全飞行高度;S300:将站场的外围角点的地理坐标转换为东北天坐标系下的坐标;S400:以最小面积规则求站场的外接矩阵;S500:计算该外接矩阵的方位角和该外接矩阵的中心点坐标;S600:以所述外接矩形的中心点坐标为原点,建立局部坐标系;S700:在局部坐标系中计算无人机的相机的拍照点位置;S800:将所述拍照点位置变换为地理坐标系下;S900:用地理坐标系下的拍照点位置生成无人机飞行航线,并设置拍照的云台角度。所述方法简单有效且安全,可以快速创建无人机航线,并能够为企业降低站场维护和管理成本。和管理成本。和管理成本。
技术研发人员:马云峰 梅华龙 刘云川 刘云刚
受保护的技术使用者:重庆泓宝科技股份有限公司
技术研发日:2023.09.01
技术公布日:2023/10/7
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。