1.本发明涉及手术机器人技术领域,尤其涉及一种手术机器人柔性臂的构型优化方法及柔性臂。
背景技术:
2.目前临床投入使用的手术机器人大多为刚性体机器人,与柔性手术机器人相比,传统刚性机器人灵活度低,应用场景受限,并且难以用于复杂狭小的腔道手术环境;与传统刚性硬度大的手术机器人不同,柔性手术机器人采用刚性或柔性材料,以其特殊结构使得刚性材料在有限手术空间内能够呈现出弯曲、折叠、伸长等特殊姿态,减少手术过程中对病患的损伤。
3.但是,现有的柔性手术机器人的柔性臂存在以下缺点:1.体积庞大,难以适应腹腔镜手术中狭小腔内环境;2.负载不足,当柔性臂末端受到器械自重负载或缝合线拉力等时,控制精度大大下降;3.大多以金属材料制成,易对人体自然腔道造成穿孔、划伤等损伤。
技术实现要素:
4.本发明公开的一种手术机器人柔性臂的构型优化方法及柔性臂,解决了现有柔性手术机器人的柔性臂体积庞大、负载不足和容易对病患自然腔道造成穿孔、划伤等问题,对柔性臂模型构造、尺寸参数、以及切口间距进行优化,并通过运动学分析、分层理论、有限元分析和拉格朗日乘子法等手段,有效扩大了柔性机器人的工作空间,增加了柔性机器人柔性臂的工作刚度,提高了柔性机器人的灵活度。
5.为达到上述目的,本发明的技术方案具体是这样实现的:
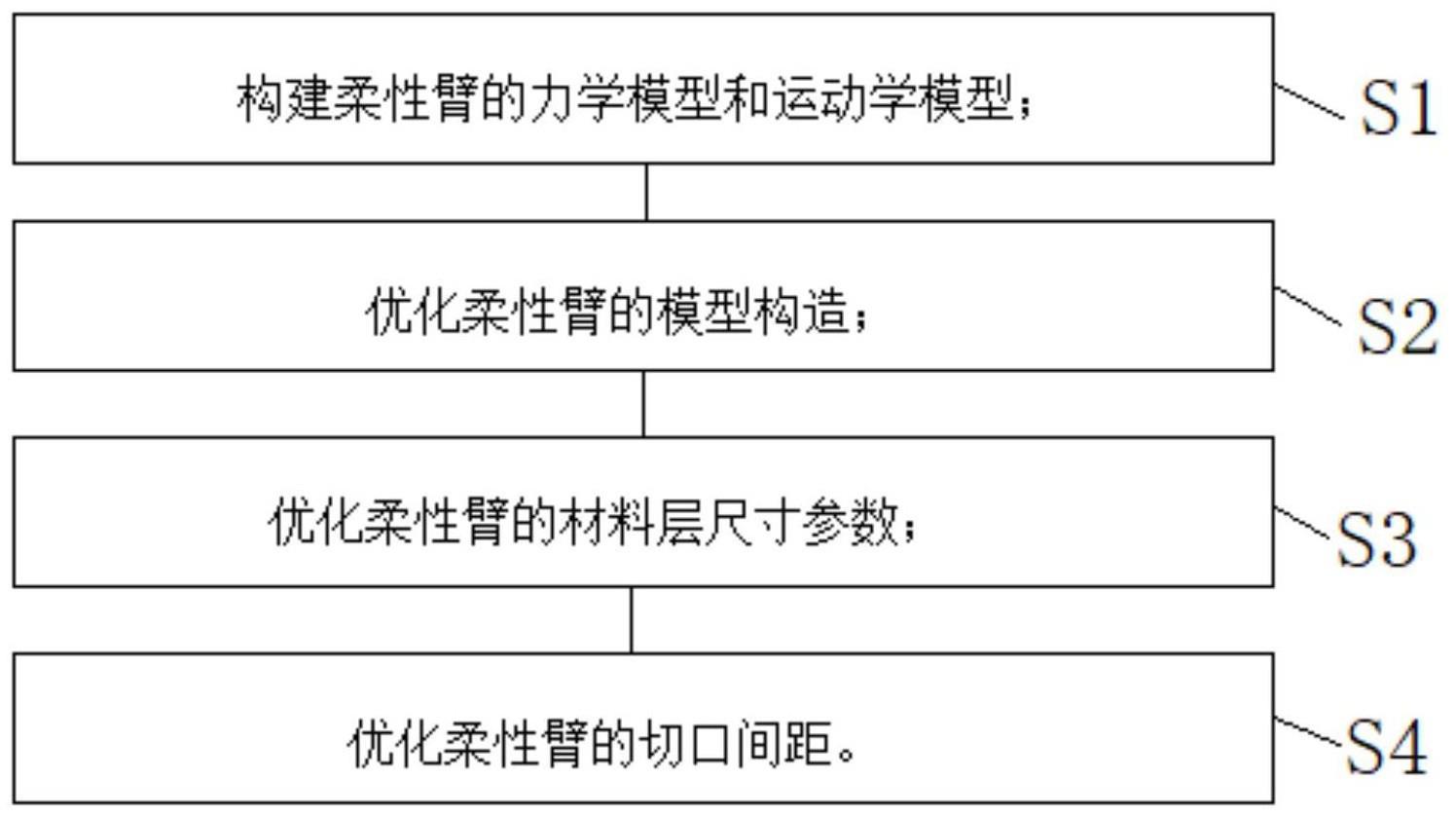
6.本发明一方面公开一种手术机器人柔性臂的构型优化方法,包括以下步骤:
7.s1:优化柔性臂的模型构造;
8.s2:优化柔性臂的材料层尺寸参数;
9.s3:优化柔性臂的切口间距。
10.进一步地,手术机器人柔性臂的构型优化方法在执行步骤s1之前,构建柔性臂的力学模型和运动学模型,其具体实现包括:
11.构建柔性臂的力学模型基于以下假设:
12.柔性段单元每个变形区域内的timoshenko梁单元局部坐标系下的刚度矩阵是相同的;将与切口方向垂直梁的弯曲面视作矩形面;忽略与切口方向垂直梁变形区域以外的微小变形;弯曲梁中性轴视作恒曲率弧;
13.当柔性段牵引线受到拉力f
p
时,单元模型上环相对下环发生倾斜,引起对于轴向梁的弯矩m
p
,导致柔性段发生弯曲,根据前提假设,弯矩可近似为
[0014][0015]
设剪力引起的梁横截面转角为γ,剪切应变作用下的挠度为wq;弯矩引起的横截
面转角为d2为肌腱孔中心至柔性段截面圆心的距离,弯矩作用下的挠度为wm;弯曲后梁中性轴曲率半径为κ,上述参数都是梁轴向坐标轴x和施加外力时间t的函数,据此可获得简化模型的运动学方程组为:
[0016][0017]
timoshenko梁所受弯矩与梁曲率成正比,timoshenko梁发生翘曲变形时横截面上的剪切应变并非均匀分布,其总剪切力可以通过本构方程表达为:
[0018][0019]
其中,m为作用于单元模型的弯矩,q为作用于单元模型的剪切力,k为timoshenko剪切系数,其与材料泊松比有关,e和g分别为材料的弹性模量和剪切模量,i为横截面对中性轴的惯性矩,a表示横截面面积;
[0020]
令柔性段整体弯曲角度为θ,θi为柔性臂第i个单元的弯曲角度,可近似看作:
[0021][0022]
其中,n为柔性臂中单元体的个数,当已知θ时,根据恒曲率原理,可将θi平均估计为θi=θ/n;
[0023]
联立方程(1)、(2)、(3)和(4)可以获得柔性臂牵引力f
p
和弯曲角度θ的映射关系;
[0024]
构建柔性臂的运动学模型基于以下假设:
[0025]
柔性臂发生弯曲变形时,其弯曲曲线以及牵引线的弯曲曲线为等曲率的平滑曲线;当柔性臂发生弯曲变形时,忽略其轴向膨胀、收缩以及周向扭转等变形情况;忽略柔性臂本身重力对弯曲的影响;
[0026]
以单个平面的弯曲为例,在柔性臂底座向远端方向的每个结构单元弯曲处建立坐标系,距底座第i个单元上的坐标为坐标系{i};
[0027]
根据几何关系推导得出柔性段弯曲时受载牵引线在第i个单元中的长度变化量为:
[0028][0029]
其中,ri=t/(2sinθi),t为柔性段的切口间距大小;
[0030]
因柔性臂各切口形状及刚性角度已知,故采用d-h法将柔性臂末端的位姿矩阵表示为:
[0031][0032]
其中,表示第i-1个坐标至第i个坐标的变换矩阵,其中,i=1,2,3,
···
,n。
[0033]
单平面内相邻关节间的旋转矩阵,表示为:
[0034][0035]
其中,li为柔性段弯曲后受载牵引线在第i个单元中的长度,其表达式为:
[0036][0037]
根据式(6)、(7)和(8)即可获得柔性臂的正运动学模型,可得出柔性段弯曲前后驱动线的长度变化为
[0038][0039]
其中,表示柔性臂内部的驱动线的初始长度。
[0040]
进一步地,步骤s1的具体实现包括:
[0041]
在柔性臂的外圆周面和内圆周面上均贴合能够分散作用于柔性臂集中应力的且具有较低刚度的材料,形成平均半径为r、厚度为h的层式复合材料直圆管,当弯曲时,在微元层面可近似将其视作由三层材料构成的悬臂梁发生弯曲,故以复合材料悬臂管对其进行分析:
[0042]
在圆管的第k层材料内,k=1,2,3,利用各层形变位移关系获得该层某坐标点在圆柱坐标系下的弹性小应变-位移关系为:
[0043][0044][0045][0046][0047][0048][0049]
其中,为第k层材料x方向的正应变,为第k层材料方向的正应变,为第k层材料r方向的正应变,为第k层材料平面的剪切应变,为第k层材料xr平面的剪切应变,为第k层材料平面的剪切应变,分别表示位于圆管内第k层材料坐标为的点在x,和r上的位移分量,x和r分别为圆管轴向和径向坐标,结合分层理论并通过积分确定层式复合材料直
圆管的位移表达式为:
[0050][0051][0052][0053][0054]
其中,z、为标示的坐标方向,x为远观轴向方向。为位于圆管内第k层材料坐标为的点在x上的位移分量,第k层材料坐标为的点在上的位移分量,为第k层材料坐标为的点在z上的位移分量,为第k层的x方向的表面位移,为第k层的方向的表面位移,为第k层的z方向的表面位移,φk(z)为与第k层表面相关的全局拉格朗日插值函数,c
1-c6为参数;
[0055]
根据层合板理论,获得第k层材料受到的近似应力表示为:
[0056][0057]
其中,σ
x
为x方向正应力,σy为y方向正应力,τ
xy
为xy平面的剪切应力,带有下标k的表示某单层的刚度矩阵,z为变量,分别为待计算的变换刚度矩阵元素,sym.表示矩阵对称元素;表示层合板中面的正应变,(k
x
,ky,k
xy
)表示中面的弯曲挠曲率;
[0058]
层合板内合力及合内力矩由各单层的应力沿层合板厚度积分得到,即
[0059][0060]
其中,(n
x
,ny,n
xy
)表示层合板合内力矩阵,(m
x
,my,m
xy
)表示层合板合内力矩矩阵;
[0061]
将式(19)代入式(20)中,积分后得到:
[0062][0063]
[0064]
其中,表示联系合内力与中面应变的刚度系数,视作拉伸刚度;表示联系合内力矩与弯曲率及扭曲率的刚度系数,视作弯曲刚度;表示拉伸、弯曲之间有耦合关系,视作耦合刚度;i=1,2,6,j=1,2,6;
[0065]
第k层的中性面坐标记为且第k层的厚度为hk,且hk=z
k 1-zk,则各刚度系数变换成如下形式:
[0066][0067][0068][0069]
其中,为公式(19)中的参数,下标i=1,2,6,j=1,2,6。
[0070]
进一步地,柔性臂的外圆周面和内圆周面上均贴合有橡胶材料。
[0071]
进一步地,步骤s2的具体实现包括:
[0072]
将柔性臂单元质量记为f,引入拉格朗日乘子λ,构造目标函数为:
[0073]
l=-f ei λg
ꢀꢀ
(26)
[0074]
其中,g=h-h0,h0表示厚度约束值,优化解通过以下条件获得,
[0075][0076]
其中,xi表示设计变量,l为拉格朗日目标函数;
[0077]
若忽略柔性臂本体材料和表层的剪切变形,在柔性臂三层材料的某处取任一微元,则该微元结构弯曲刚度表示为:
[0078][0079]
其中,r
t
表示柔性臂本体材料厚度与总厚h之比,令参数r
t
为设计变量,则有:
[0080][0081]
其中,ρ
ni-ti
表示镍钛合金的材料密度,ρr表示橡胶的材料密度。
[0082]
进一步地,步骤s3的具体实现包括:
[0083]
在柔性臂整体尺寸确定的情况下尽可能提高柔性臂的可弯曲角度,将限制条件设置为:柔性臂的总长l=80mm,最大外径d1=8mm;
[0084]
切口式柔性臂的弯曲运动主要依靠材料体的塑性变形,设柔性臂的最大可弯曲角度为θ,即柔性臂所有单元结构同时发生最大弯曲变形时的单元角度θc的总和,θc的表达式
为:
[0085][0086]
则柔性臂总弯曲角可以表示为:
[0087][0088]
其中,le表示柔性臂两端与其他部分连接的段长,t为切口间隙。
[0089]
本发明另一方面公开一种手术机器人柔性臂,所述柔性臂通过上述的一种构型优化方法进行优化获得。
[0090]
进一步地,所述柔性臂有两个自由度,柔性臂本体材料选用镍钛合金管,每个结构单元由在镍钛合金管上切出的四个90
°
相邻交错的半圆切口形成,且镍钛合金管的外圆周面和内圆周面上均贴合有橡胶,且镍钛合金管的厚度和总厚度比选择为0.167,柔性臂上切口间隙为1mm。
[0091]
有益技术效果:
[0092]
1、本发明公开一种手术机器人柔性臂的构型优化方法,包括以下步骤:s1:优化柔性臂的模型构造;s2:优化柔性臂的材料层尺寸参数;s3:优化柔性臂的切口间距,对柔性臂模型构造、尺寸参数、以及切口间距进行优化,并通过运动学分析、分层理论、有限元分析和拉格朗日乘子法等手段,有效扩大了柔性机器人的工作空间,增加了柔性机器人柔性臂的工作刚度,提高了柔性机器人的灵活度;
[0093]
2、本发明公开一种通过构型优化方法设计的柔性臂,柔性臂的外圆周面和内圆周面上均贴合橡胶,多层材料使得柔性臂的径向、轴向正应力以及剪切应力都均匀分散至整段圆管各部位,发生应力集中而导致结构受到的最大径向应力和环向应力减小,有效增强结构强度,大大降低因金属薄层的脆性发生断裂的事故几率;另外,由于镍钛合金管内外层橡胶材料的包覆导致结构崩溃的可能性大大减小;此外,在实际临床应用时,橡胶能够有效避免金属直接与人体组织、表皮接触时可能产生的划伤、撕裂等现象,在一定程度上提高了手术的安全系数;
[0094]
3、本发明中公开一种通过构型优化方法设计的柔性臂,柔性臂能够实现在弯曲角90
°
的范围内,负载50g情形下末端偏移误差小于0.5mm,整体误差均值为0.27mm,相较于未优化切口间距和未优化材料层的柔性臂末端平均误差分别减小了90.07%和49.06%,柔性臂端负载能力提高了70%以上,能够更好地满足手术过程中的柔性臂末端负载和精度要求。
附图说明
[0095]
为了更清楚地说明本发明的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍。
[0096]
图1为本发明所述的一种手术机器人柔性臂的构型优化方法的步骤流程图;
[0097]
图2为未进行优化时的初始切口式柔性臂的结构示意图;
[0098]
图3为柔性段单元简化模型示意图;
[0099]
图4为柔性段的运动学建模模型示意图;
[0100]
图5为优化后的柔性臂的结构示意图;
[0101]
图6为柔性臂本体材料厚度和总厚度比值和拉格朗日函数关系的示意图;
[0102]
图7为双单元段弯曲模型及最大弯曲角曲线示意图;
[0103]
图8为柔性臂切口间距4mm体位移谱图;
[0104]
图9为柔性臂的切口间距为1mm时,柔性臂在不同牵引力下的末端位移值;
[0105]
图10为柔性臂的切口间距为0.25mm时,柔性臂在不同牵引力下的末端位移值。
[0106]
其中,1-柔性臂,11-刚性梁,12-切口,13-刚性环,14-柔性段单元。
具体实施方式
[0107]
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
[0108]
下面结合附图对本发明的实施方式进行详细说明。
[0109]
本发明一方面公开一种手术机器人切口式柔性臂的构型优化方法,参见图1,具体包括以下步骤:
[0110]
s1:构建柔性臂的力学模型和运动学模型;
[0111]
需要说明的是,构建力学模型和运动学模型是根据如图2所示的柔性臂进行的,具有两个自由度,每个结构单元由在镍钛合金管上切出四个90
°
相邻交错的半圆切口12形成,其灵活工作空间大,提升了现有切口式连续体机器人自由度不足的短板,同时一定程度上改善了多骨架连续体刚度不足的问题。
[0112]
由于本发明公开的柔性臂整体的弯曲运动依赖于切口单元的弹性形变,因此在设计其运动控制方案前需考虑柔性臂的弹性形变特性和力学模型。
[0113]
柔性臂由切口完成可弯曲特性,故需要充分考虑材料在外力加载下的断裂和振动特性,通过有限元分析可以得知,在柔性臂发生弯曲变形时,应力最大处集中在与切口方向垂直的轴向竖直梁两侧,故需要对该段梁进行分析,该段梁在发生弯曲时的高跨比较大(》1/5),需考虑其旋转惯性和切应力效应,故将其视作timoshenko梁进行讨论。
[0114]
具体地,构建柔性臂的力学模型基于以下假设:
[0115]
柔性段单元每个变形区域内的timoshenko梁单元局部坐标系下的刚度矩阵是相同的;将与切口方向垂直梁的弯曲面视作矩形面;忽略与切口方向垂直梁变形区域以外的微小变形;弯曲梁中性轴视作恒曲率弧;
[0116]
当柔性段牵引线受到拉力f
p
时,单元模型上环相对下环发生倾斜,参见图3和图4,引起对于轴向梁的弯矩m
p
,导致柔性段发生弯曲,根据前提假设,弯矩可近似为:
[0117][0118]
设剪力引起的梁横截面转角为γ,剪切应变作用下的挠度为wq;弯矩引起的横截面转角为d2为肌腱孔中心至柔性段截面圆心的距离(如图4放大图所示),弯矩作用下的挠度为wm;弯曲后梁中性轴曲率半径为κ,上述参数都是梁轴向坐标轴x和施加外力时间t的函数,据此可获得简化模型的运动学方程组为:
[0119][0120]
timoshenko梁所受弯矩与梁曲率成正比,timoshenko梁发生翘曲变形时横截面上的剪切应变并非均匀分布,其总剪切力可以通过本构方程表达为:
[0121][0122]
其中,m为作用于单元模型的弯矩,q为作用于单元模型的剪切力,如图3所示。k为timoshenko剪切系数,其与材料泊松比有关,e和g分别为材料的弹性模量和剪切模量,i为横截面对中性轴的惯性矩,a表示横截面面积;
[0123]
令柔性段整体弯曲角度为θ,θi为柔性臂第i个单元的弯曲角度,可近似看作:
[0124][0125]
其中,n为柔性臂中单元体的个数,当已知θ时,根据恒曲率原理,可将θi平均估计为θi=θ/n;
[0126]
联立方程(1)、(2)、(3)和(4)可以获得柔性臂牵引力f
p
和弯曲角度θ的映射关系;
[0127]
构建柔性臂的运动学模型基于以下假设:
[0128]
柔性臂发生弯曲变形时,其弯曲曲线以及牵引线的弯曲曲线为等曲率的平滑曲线;当柔性臂发生弯曲变形时,忽略其轴向膨胀、收缩以及周向扭转等变形情况;忽略柔性臂本身重力对弯曲的影响;
[0129]
以单个平面的弯曲为例,在柔性臂底座向远端方向的每个结构单元弯曲处建立坐标系,距底座第i个单元上的坐标为坐标系{i};
[0130]
根据几何关系推导得出柔性段弯曲时受载牵引线在第i个单元中的长度变化量为:
[0131][0132]
其中,ri=t/(2sinθi),t为柔性段的切口间距大小;
[0133]
因柔性臂各切口形状及刚性角度已知,故采用d-h法将柔性臂末端的位姿矩阵表示为:
[0134][0135]
其中,表示图4所示的第i-1个坐标至第i个坐标的变换矩阵,i=1,2,3,
···
,n。
[0136]
单平面内相邻关节间的旋转矩阵,表示为:
[0137][0138]
其中,li为柔性段弯曲后受载牵引线在第i个单元中的长度,其表达式为:
[0139][0140]
根据式(6)、(7)和(8)即可获得柔性臂的正运动学模型,可得出柔性段弯曲前后驱动线的长度变化为
[0141][0142]
其中,表示柔性臂内部的驱动线的初始长度。
[0143]
s2:优化柔性臂的模型构造;
[0144]
切口式连续体柔性臂厚度过薄,在实际使用时,若牵引线拉力过大(力学模型)或长度变量过大(运动学模型)容易使得柔性臂发生塑性变形失效乃至断裂、单元间错位等情况。
[0145]
若单纯加大其壁厚可以降低断裂的可能性,但连续体弯曲性能也相应减弱,且难以避免错位的问题,为解决此问题,本发明公开的柔性臂的外圆周面和内圆周面上均贴合能够分散作用于柔性臂集中应力的且具有较低刚度的材料,形成“三明治”夹层结构(内外两层组成材料为橡胶,中间层材料为镍钛合金),参见图5,形成平均半径为r、厚度为h的层式复合材料直圆管,优选地,柔性臂的外圆周面和内圆周面上均贴合橡胶材料,多层材料使得柔性臂的径向、轴向正应力以及剪切应力都均匀分散至整段圆管各部位,发生应力集中而导结构受到的最大径向应力和环向应力减小,有效增强结构强度,大大降低因金属薄层的脆性发生断裂的事故几率;另外,由于镍钛合金管内外层橡胶材料的包覆致结构崩溃的可能性大大减小;此外,在实际临床应用时,橡胶能够有效避免金属直接与人体组织、表皮接触时可能产生的划伤、撕裂等现象,在一定程度上提高了手术的安全系数。
[0146]
具体地,当“三明治”构型的柔性臂弯曲时,在微元层面可近似将其视作由三层材料构成的悬臂梁发生弯曲,故以复合材料悬臂管对其进行分析,需要说明的是,在复合材料悬臂管的完全应力场中,本发明仅考虑第i部分应力,忽略第ii部分应力的影响;
[0147]
在圆管的第k层材料内,k=1,2,3,利用各层形变位移关系获得该层某坐标点在圆柱坐标系下的弹性小应变-位移关系为:
[0148][0149][0150][0151]
[0152][0153][0154]
其中,为第k层材料x方向(图5轴向)的正应变,为第k层材料方向(图5)的正应变,为第k层材料r方向(图5)的正应变,为第k层材料平面(图5)的剪切应变,为第k层材料xr平面(图5)的剪切应变,为第k层材料平面(图5)的剪切应变,分别表示位于圆管内第k层材料坐标为的点在x,和r上的位移分量,x和r分别为圆管轴向和径向坐标,结合分层理论并通过积分确定层式复合材料直圆管的位移表达式为:
[0155][0156][0157][0158]
其中,z、为图5标示的坐标方向,x为图5远观轴向方向,为位于圆管内第k层材料坐标为的点在x上的位移分量,第k层材料坐标为的点在上的位移分量,为第k层材料坐标为的点在z上的位移分量,为第k层的x方向的表面位移,为第k层的方向的表面位移,为第k层的z方向的表面位移,φk(z)为与第k层表面相关的全局拉格朗日插值函数,c
1-c6为参数;
[0159]
根据层合板理论,获得第k层材料受到的近似应力表示为:
[0160][0161]
其中,σ
x
为x方向正应力,σy为y方向正应力,τ
xy
为xy平面的剪切应力,带有下标k的表示某单层的刚度矩阵,z为变量,分别为待计算的变换刚度矩阵元素,sym.表示矩阵对称元素;表示层合板中面的正应变,(k
x
,ky,k
xy
)表示中面的弯曲挠曲率,该两组值对于任一层来说不发生改变;
[0162]
层合板内合力及合内力矩由各单层的应力沿层合板厚度积分得到,即
[0163][0164]
其中,(n
x
,ny,n
xy
)表示层合板合内力矩阵,(m
x
,my,m
xy
)表示层合板合内力矩矩阵;
[0165]
将式(19)代入式(20)中,积分后得到:
[0166][0167][0168]
其中,表示联系合内力与中面应变的刚度系数,视作拉伸刚度;表示联系合内力矩与弯曲率及扭曲率的刚度系数,视作弯曲刚度;表示拉伸、弯曲之间有耦合关系,视作耦合刚度;i=1,2,6,j=1,2,6;
[0169]
第k层的中性面坐标记为且第k层的厚度为hk,且hk=z
k 1-zk,则各刚度系数变换成如下形式:
[0170][0171][0172][0173]
其中,为公式(19)中的参数,下标i=1,2,6,j=1,2,6。
[0174]
本发明公开的“三明治”层合柔性臂在微观层面可以视作对称层合板,根据层合板的本构关系可知,在本发明公开的结构中不存在拉弯耦合效应(忽略金属段切口处未实现三层贴合的部分)。
[0175]
下面从理论层面验证该优化手段的有效性,需对该结构的刚度进行计算,柔性臂尺寸及材料参数列于表1。
[0176]
表1柔性臂尺寸及材料参数
[0177][0178]
根据表1所列数据计算得到本发明公开的柔性臂的拉伸刚度和弯曲刚度分别为:
[0179][0180][0181]
根据计算得到的数据与同尺寸仅金属构成的柔性臂进行有限元仿真对比,在不考虑外界施加载荷值差异的情况下,当两种柔性臂弯曲曲率近似(视作相等)时,单层的柔性臂应力均值较大,更容易发生断裂等问题。
[0182]
与单一仅由镍钛合金构成的同尺寸柔性臂结构相比,引入不同层后,其径向、轴向正应力以及剪切应力都均匀分散至整段圆管各部位,发生应力集中而导结构受到的最大径向应力和环向应力减小,能够有效增强结构强度,大大降低因金属薄层的脆性发生断裂的事故几率;另外,由于镍钛合金管芯内外层橡胶材料的包覆致结构崩溃的可能性大大减小,因在实际临床应用时,橡胶能够有效避免金属直接与人体组织、表皮接触时可能产生的划伤、撕裂等现象,在一定程度上提高了手术的安全系数。
[0183]
s3:优化柔性臂的材料层尺寸参数;
[0184]
考虑到柔性臂工作环境位于狭小的腹部空间,为满足器械整体小型、轻质化要求,根据上述分析,考虑引入拉格朗日乘子法,以梁在总厚度一定的条件下质量较低,刚度较大为目标对柔性臂进行优化。
[0185]
具体地,将柔性臂单元质量记为f,引入拉格朗日乘子λ,构造目标函数为:
[0186]
l=-f ei λg
ꢀꢀ
(26)
[0187]
其中,g=h-h0,h0表示厚度约束值,优化解通过以下条件获得,
[0188][0189]
xi表示设计变量,l为拉格朗日目标函数;
[0190]
若忽略柔性臂本体材料和表层的剪切变形,在柔性臂三层材料的某处取任一微元,则该微元结构弯曲刚度表示为:
[0191][0192]
其中,r
t
表示柔性臂本体材料厚度与总厚h之比,令参数r
t
为设计变量,则有:
[0193][0194]
其中,ρ
ni-ti
表示镍钛合金的材料密度,ρr表示橡胶的材料密度。
[0195]
为预留控制引线等穿过的中心通道,本发明公开柔性臂的“三明治”结构总厚度需设定在3mm以内,本实施例中分别选取总厚度为0.5mm,0.8mm,1mm,2mm,3mm的情况作拉格朗日函数曲线,将表1中相关数据代入式(29)的拉格朗日表达式中,获得柔性臂本体材料厚度与总厚度的比值和拉格朗日函数关系如图6所示。
[0196]
由图6可知,当厚度约束值发生改变时,得到的优化解也相应发生变化;当厚度h≤1mm时,随着厚度比增大,拉格朗日函数值减小;当厚度h≥2mm时,拉格朗日函数可能会出现极值点,并且发生趋势变化反转;当厚度比在0.1-0.3的范围内(见图6局部放大图),几种情况下的拉格朗日函数值出现相对集中的交点,故可推断,对于柔性臂来说柔性臂本体材料的厚度与总厚度的比值选取不宜过大。
[0197]
由上述内容可知,“三明治”构型的柔性臂的金属层厚度和总厚存在一定厚度比,这一比值与结构的刚度以及整体质量存在一定的关系,为能够在提高手术机器人临床使用轻质化的同时降低制造的用料成本,同时考虑制造难易程度等因素,优选柔性臂本体材料厚度和总厚度比选择为0.167左右。
[0198]
s4:优化柔性臂的切口间距。
[0199]
需要说明的是,优化切口间距需以均匀切口的柔性臂为基础,考虑改变柔性臂内切口分布的间距大小,获得最佳切口间距以提升该结构下柔性臂的整体性能。
[0200]
具体地,为了在柔性臂整体尺寸确定的情况下尽可能提高连续体的可弯曲角度,将限制条件设置为:柔性臂的总长l=80mm,最大外径d1=8mm。
[0201]
切口式柔性臂的弯曲运动主要依靠材料体的塑性变形,设柔性臂的最大可弯曲角度为θ,即柔性臂所有单元结构同时发生最大弯曲变形时的单元角度θc的总和,通过图7可得θc的表达式为:
[0202][0203]
则柔性臂总弯曲角可以表示为:
[0204][0205]
其中,le表示柔性臂两端与其他部分连接的段长,t为切口间隙。
[0206]
式(31)获得了切口间隙t和连续体最大可弯曲角度θ的关系,当切口间隙为4mm时,柔性段可实现的最大弯曲角度值最大;当t≤4mm时,最大弯曲角度随着切口间距的增大而增大;令切口间距为4mm,对连续体进行有限元仿真,结果如图8,可以看到当切口间距为4mm时虽可实现理论上的最大弯曲值,但当柔性臂末端位移达到一定值(末端位移为23.2mm)时,柔性臂的单元结构变形也较大(图8中的局部放大),故实际选用时切口间距不能过大。
[0207]
本实施例中分别以切口间距为1mm和0.25mm的柔性臂为例进行有限元分析,根据
图9和图10可以看出,对切口间距为0.25mm的柔性臂某一牵引线施加约0.03n或0.0002n的拉力时,其末端位移值即可分别达到27.3mm和0.2mm左右;对切口间距为1mm的柔性臂来说,为实现等量的末端位移值,需对牵引线施加4.2n或0.03n的拉力,因此,当两种柔性臂的末端位移相同时,对于切口间距更小的柔性臂牵引线施加的拉力值相较于初始柔性臂减少了2个数量级,此时柔性臂的刚性大大下降,难以适应实际手术过程中末端器械的负载要求。
[0208]
在实际操作时,需考虑摩擦等因素的影响,故真实值应大于有限元仿真时的模拟值,综合考虑柔性臂所需刚性、弯曲角度优化的要求以及加工难易程度,本发明的实施例优选柔性臂的切口间距为1mm。
[0209]
本发明另一方面公开一种利用上述优化方法优化后的柔性臂,柔性臂有两个自由度,柔性臂本体材料选用镍钛合金管,每个结构单元由在镍钛合金管上切出的四个90
°
相邻交错的半圆切口形成,且镍钛合金管的外圆周面和内圆周面上均贴合有橡胶,且镍钛合金管的厚度和总厚度比选择为0.167,柔性臂上切口间隙为1mm。
[0210]
发明公开的柔性臂能够实现在弯曲角90
°
的范围内,负载50g情形下末端偏移误差小于0.5mm,整体误差均值为0.27mm,相较于未优化切口间距和未优化材料层的柔性臂末端平均误差分别减小了90.07%和49.06%,末端负载能力提高了70%以上,能够更好地满足手术过程中的柔性臂末端负载和精度要求。
[0211]
本发明公开的柔性臂构型优化方法可实现对柔性臂的模型构造、材料层尺寸参数和切口间距的优化,有效扩大了柔性机器人的工作空间,增加了柔性机器人柔性臂的工作刚度,提高了柔性机器人的灵活度;本发明公开的柔性臂的外圆周面和内圆周面上均贴合橡胶,多层材料使得柔性臂的径向、轴向正应力以及剪切应力都均匀分散至整段圆管各部位,发生应力集中而导结构受到的最大径向应力和环向应力减小,有效增强结构强度,大大降低因金属薄层的脆性发生断裂的事故几率;另外,由于镍钛合金管内外层橡胶材料的包覆致结构崩溃的可能性大大减小;此外,在实际临床应用时,橡胶能够有效避免金属直接与人体组织、表皮接触时可能产生的划伤、撕裂等现象,在一定程度上提高了手术的安全系数。
[0212]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0213]
以上的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通工程技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明的权利要求书确定的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。