1.本发明涉及黑冰感测系统,详细地说,涉及一种利用沿着道路设置的反射体和波束形成阵列雷达来测定基于道路上的水和冰的状态变化的介电常数变化并感测结冰状况而发出警报及采取措施的道路的黑冰感测系统。
背景技术:
2.黑冰是雪或雨渗入柏油路缝隙后与灰尘等混合,在路面上形成薄冰的道路结冰现象,因颜色与普通的铺装道路柏油路相同而肉眼识别困难,比积雪的道路更滑,在高速行驶状态下,会导致第二次、第三次事故,还会引发大型事故等,造成巨大损失。
3.据悉黑冰相比被雪覆盖的普通道路滑6倍,比没有积雪的普通道路滑14倍左右。
4.但是,行驶中的驾驶员将其识别为被水浸湿的程度,对此不以为然而继续行驶,或发生未能识别因阳光下和阴凉处的温度差异而在隧道及桥下黑暗处产生的黑冰而驶过的情况,因此经常发生黑冰事故。
5.这种黑冰的产生与气象及环境密切相关,实际上不可能进行人为控制。虽然近来试图利用气候观测资料预测黑冰的发生并制定对策,但由于并不是预测的所有区间和期间都产生黑冰,所以准确度还不高。
6.政府和地方自治团体虽然正在制定确认经常结冰地区或事故多发地区等脆弱地点并采取埋设热线、喷洒盐水、在路上开槽(grooving)等对策,但由于不知道会在何时何地发生而存在局限性,最终只能依靠驾驶员的识别。并且,除了比平时速度更低的速度行驶并敦促驾驶员注意的方法之外,还没有其他有效的应对方法。
技术实现要素:
7.要解决的技术问题
8.本发明为了解决上述问题而提出,其目的在于,提供一种利用波束形成阵列雷达的道路的黑冰感测系统,分析通过反射体直接反射的第一反射波和通过所述反射体及道路依次反射的第二反射波的干涉而能够精确感测道路上形成的黑冰,并且以较低成本对宽阔的道路区域进行黑冰感测。
9.解决问题的手段
10.用于达成所述目的的本发明的道路的黑冰感测系统,其特征在于,包括:雷达,具有设置在道路一侧且朝向道路放射电波的发送部以及收集放射后通过物体反射的电波的接收部;反射体,以所述雷达为基准设置在道路对面且具有电波反射特性;控制部,具有保存部及判断部,保存部用于保存基于通过所述发送部放射而通过所述反射体直接反射的第一反射波和通过所述反射体及道路依次反射的第二反射波的干涉的干涉波,判断部通过所述干涉波的分析来分析路面状态并判断是否是黑冰。
11.优选地,所述控制部还包括按预设时间启动所述雷达且保存各个时间所对应的干涉波的计时器以及分析所述干涉波的变化并提取对应没有黑冰的正常状态的道路的基准
信号的提取部,所述判断部比较接收的干涉波和所述基准信号而判断道路状态。
12.优选地,所述反射体是由彼此正交的三张导电板构成的角形反射器,沿着道路以预设间隔固定设置。
13.优选地,所述雷达还包括对应所述反射体的设置位置转换电波的放射及收集方向的方向转换部,所述控制部还包括与所述方向转换部联动而输出道路各个位置的状态判断结果的位置确认部。
14.所述控制部还可以包括感测道路上车辆的靠近及通过而在没有车辆时启动所述雷达的车辆感测部。
15.并且,所述控制部还包括收集包含温度及湿度的气象信息的收集部以及分析所述气象信息而在可能会产生黑冰的条件下激活所述雷达启动的信息联动部。
16.发明的效果
17.通过本发明,可以精确感测冬季形成在道路上的黑冰,将感测结果与警报及应对手段联动,有效预防因黑冰引发的大型交通事故,保护生命和财产。
18.尤其,为了构建系统,在仅具备一台昂贵雷达的情况下,沿着道路仅设置价格相对低廉的反射体,从而可以对宽阔道路区域进行黑冰感测,因此以较低的费用实现有效的黑冰感测。
附图说明
19.图1是本发明的概念图,
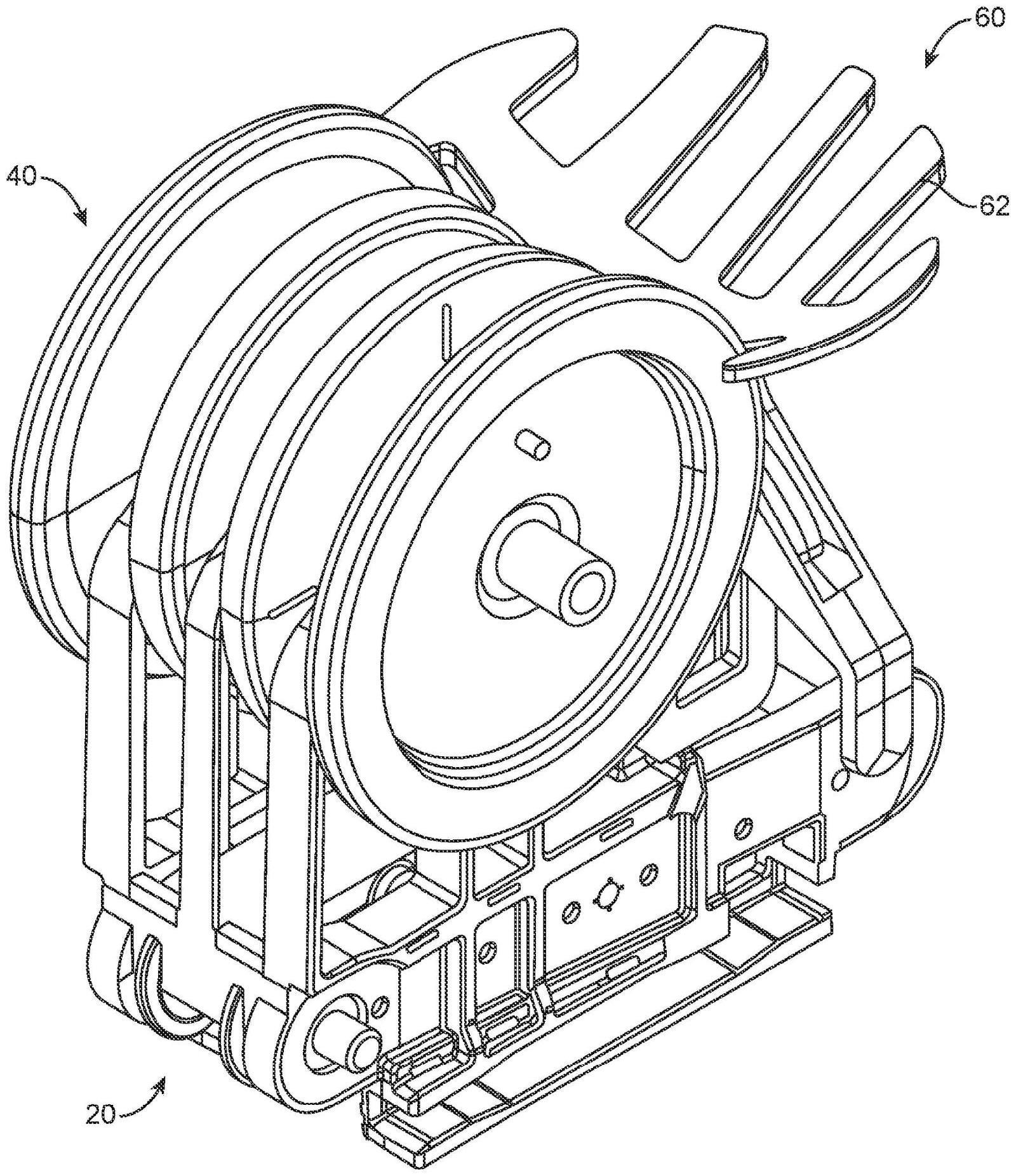
20.图2是示出本发明实施例的设置样态的立体图,
21.图3是示出本发明的一个实施例的构件及连接关系的框图,
22.图4是示出本发明的另一实施例的构件及连接关系的框图。
具体实施方式
23.下面参照附图具体描述本发明的利用波束形成阵列雷达的道路的黑冰感测系统的结构。
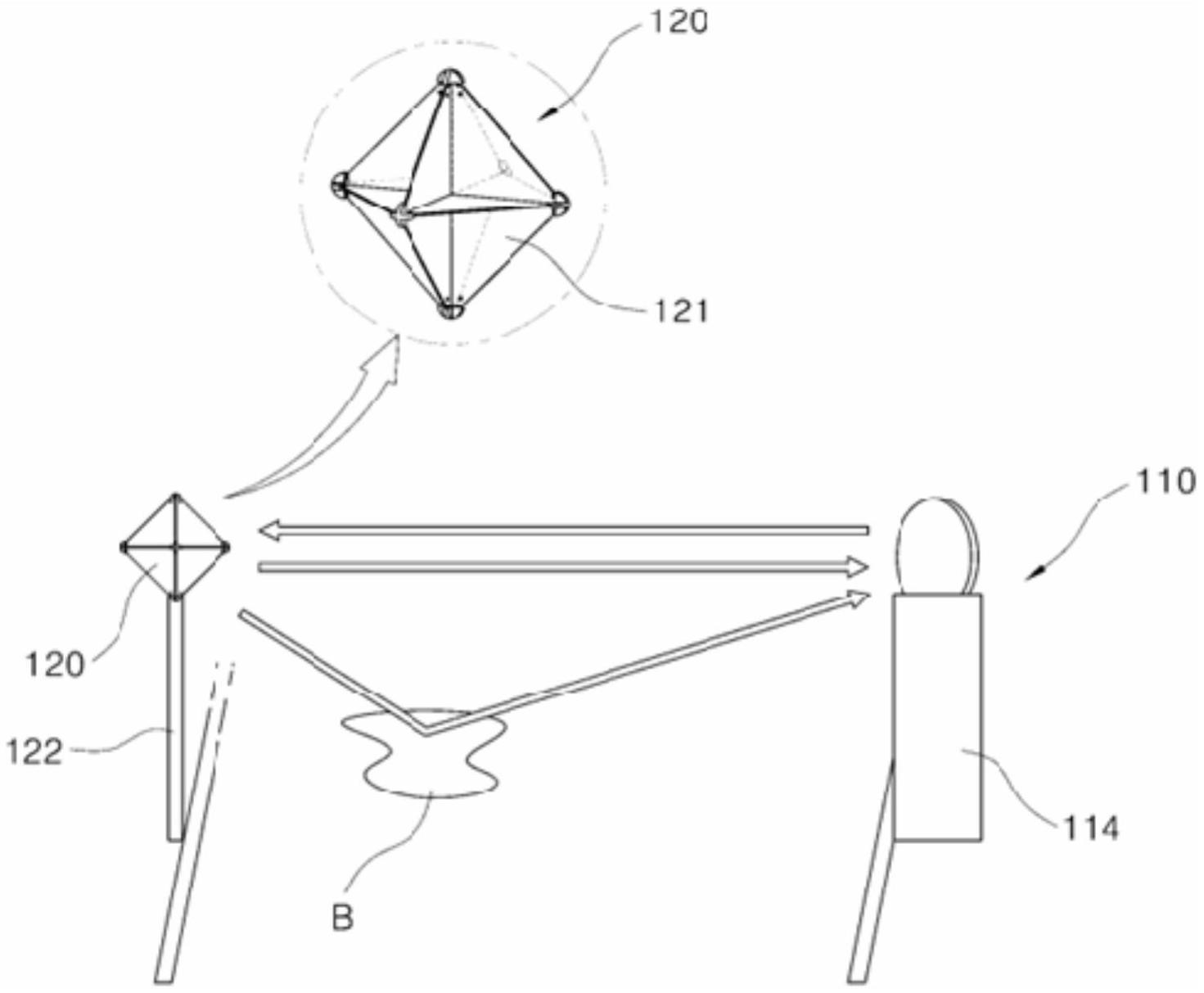
24.图1是本发明的概念图,本发明采用数字波束形成阵列雷达,设置在冬季经常结冰的场所等有可能产生黑冰的道路上,通过根据基于道路上的水和冰的状态变化的介电常数变化的测定结果准确掌握黑冰等结冰状态而采取措施。
25.为此,为了使电波横穿道路,一侧设置雷达110,另一侧设置电波的反射面积(rcs,radar cross section)较大的反射体120。
26.图2是示出本发明实施例的设置样态的立体图,图3是示出本发明的一个实施例的构件及连接关系的框图,本发明以雷达110、反射体120、控制部130为基本构件。
27.所述雷达110是设置在道路一侧的波束形成阵列雷达,包括朝向道路放射电波的发送部111以及收集放射后通过物体反射的电波的接收部112。发送频率使用1~100ghz频带的ism带,为了感测黑冰,优选地,使用有效的频率范围20~25ghz频带。
28.这种雷达110通过设置结构体114被设置在既定高度,也可以在所述设置结构体114的下部设置轮子等而根据需要来移动。
29.所述反射体120以所述雷达110为基准设置在道路对面,反射通过所述雷达的发送
部111放射的电波,本发明中,反射体使用电波反射特性优异的角形反射器。
30.角形反射器如图所示,由彼此正交的三张导电板121构成,反射放射的电子而使其有效地返回到波源,是一种用于在正常雷达观察中更可靠地测量位置的装置。
31.这种反射体120通过柱状支撑体122被设置在离地面预设高度的位置。
32.即,以道路为中间,一侧设置雷达110,另一侧设置反射体120,通过分析朝向反射体120放射而通过中间的道路返回的电波来实现黑冰的感测。
33.为此,控制部130是与所述雷达110一同构成而控制雷达110的同时处理信号的构件,具有保存部131、判断部132、计时器133及提取部134。
34.本发明中,基于通过所述发送部111放射而通过所述反射体120直接反射的第一反射波和通过所述反射体120及道路依次反射的第二反射波的干涉的干涉波,实现黑冰的感测。具体地说,相当于存储器的所述保存部131保存基于所述第一反射波和第二反射波的干涉的干涉波,之后,所述判断部132通过所述干涉波的分析来分析路面状态,从而判断是否是黑冰。
35.即,在通过所述发送部111放射的雷达波束宽度内,通过所述接收部112同时接收第一反射波和第二反射波。此时,因第一反射波与第二反射波的相互干涉,导致接收的iq信号的相位变化,本发明将其定义为干涉波。这种干涉波的相位变化起因于基于道路上水的状态变化的介电常数变化,尤其,该变化在20ghz频带较大。在道路状态干燥的情况、有水的情况、有冰的情况下,干涉波的相位都不同,据此可以准确确认道路状态。
36.如上述,基于干涉波的相位掌握道路状态的方法可以采用以各个状态下收集的干涉波作为基准信号而进行比较的方式。
37.为此,所述计时器133按预设时间启动所述雷达110并保存各个时间所对应的干涉波,所述提取部134分析所述干涉波的变化并提取对应没有黑冰的正常状态的道路的基准信号。
38.这种基准信号的提取可以从系统制作过程中反映一般的道路状况而预先收集保存的数据中提取,也可以从将系统设置在现场后一定时间内收集的数据中提取。
39.结果,保存并分析分别在前述的干燥的道路、有水分的道路、有冰的道路上收集的干涉波进行判断,从而能够实现作为道路状态判断基准的基准信号的提取。
40.与此相对应地,所述判断部132比较实时接收的干涉波与所述基准信号而判断道路状态,比较分析干涉波相位与基准信号即干燥的道路、有水分的道路、有冰的道路上预先收集并提取的信号的相位,由此判断当前道路面的状态。
41.当通过所述判断部132确认路面上存在冰即黑冰时,采用经过现场的驾驶员可识别的电子屏幕、警灯等视觉警报手段或警报音等听觉警报手段输出该判断结果,提醒通行的驾驶员注意或传达给管理道路的相关机构及指定终端机,从而可以采取措施。
42.此外,还可以与设置在现场的可无人操作的除雪、除冰装置产生联动,例如喷洒盐水或除雪剂的手段,使去除黑冰的措施到位。
43.此时,如果产生黑冰的区间比较长,由于通过单一的雷达及反射体监视的范围有限,为了扩大监视范围,可以考虑设置多个雷达或持续移动雷达的位置,但由于雷达价格昂贵,导致经济效率大幅下降。
44.因此,本发明采用的方案是使用价格高昂的雷达1台并沿着道路按预设间隔固定
设置价格相对低廉而经济负担较少的反射体120来有效扩张监视区域。
45.图4是示出本发明的另一实施例的构件及连接关系的框图,反映了监视区域扩张的同时用于有效运用而追加的构件。
46.对应所述反射体120的设置,所述雷达110上对应设置的反射体的位置而设置用于转换电波的放射及收集方向的方向转换部113。即,如前所述,雷达110所基本具备的发送部111及接收部112朝向反射体120,因设置多个反射体,为了朝向具有发送部及接收部的各个反射体,将包括控制马达的方向转换部113设置在所述发送部111及接收部112下侧而能够转换方向。
47.即,将所述方向转换部113设置在发送部111及接收部112下侧而能够向侧面转换方向,在朝向各个反射体120的位置暂停既定时间而实现电波的发送和接收。假设以数十米的间隔设置四个反射体,所述方向转换部依次往返对应各个反射体方向的四个地点,发送部及接收部朝向各个反射体,发送和接收电波的过程中,可以暂时停止。
48.与此相对应地,所述控制部130还包括与所述方向转换部113联动而输出道路各个位置的状态判断结果的位置确认部135。即,与设置的反射体对应而在各个反射体方向收集的干涉波,按照通过方向转换部113及位置确认部135确认的各个反射体位置另行处理,据此实现以反射体为基准的道路的各个位置的状态判断,从而可以准确掌握黑冰的位置。
49.实质上道路中没有通行车辆时,可以准确地掌握这种道路状态,即,车辆位于道路的状态下,没必要运用雷达,所述控制部130还可以包括感测道路上车辆的靠近及通过而在没有车辆时启动所述雷达110的车辆感测部136。
50.所述车辆感测部136是能够感测车辆靠近的传感器,可利用专门用于感测车辆的一种雷达感传器来实现。所述车辆感测部136为了顺畅地判断道路状态而感测靠近的车辆,当感测到车辆时,控制雷达110不启动,最终仅在没有车辆的状态下启动雷达110,从而准确地接收及分析干涉波。
51.与此同时,气象条件上不会产生黑冰时,为了防止不必要的启动,所述控制部130还可以包括收集包含温度及湿度的气象信息的收集部137以及分析所述气象信息而在可能会产生黑冰的条件下激活所述雷达110启动的信息联动部138。
52.其中,所述收集部137可以是能够测定现场的温度及湿度的温度传感器及湿度传感器,也可以与提供气象信息的网站连接而收集系统设定的相应地区的温度及湿度等气象信息。
53.并且,所述信息联动部138对比已确认的黑冰产生条件和通过所述收集部137收集的气象信息来判断现场是否能够产生黑冰。然后,在产生黑冰的可能性较小的情况下,中断所述雷达110的驱动,仅在可能发生黑冰的情况下,周期性地运用雷达110实现道路的监视,从而实现有效的系统操作。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。