1.本发明涉及微机电系统(mems),定位导航技术、红外物理学和无线通信技术相关领域,具体涉及到一种基于活体昆虫的爬行控制及自动搜寻的无线装置。
背景技术:
2.千百万年来,自然界的动物已经进化出许多的能力。例如奔跑,跳跃和飞翔。近年来,随着科技的发展,研究人员对仿生机器人技术的兴趣日益浓厚。他们希望利用各类传感器以及电子元件的结合去模仿生物运动和从事特定生物活动。仿生机器人具有许多优点,如灵活性、适应性和耐久性等。但是在一些特定的情况下,例如灾难发生后的人员搜救的场景。仿生机器人在实际应用中存在一些缺陷。
3.首先仿生机器人的能源供应存在问题。由于其需要大量的能量来维持运动和操作,因此在灾难救援场景中,能源供应可能会成为一个限制因素。其次仿生机器人的机械结构和材料可能不够坚固。在灾难救援场景中,仿生机器人需要经受各种恶劣环境的考验,如高温、高压、强辐射等。如果机械结构和材料不够坚固,可能会导致机器人损坏或失效,从而影响救援效果。并且由于仿生机器人的控制系统比较复杂,仿生机器人的控制系统可能存在故障。可能会出现故障或失控的情况。最后由于技术限制,仿生机器人的运动能力难以和昆虫媲美,在复杂狭小环境中,仿生机器人的运动控制非常困难,难以胜任灾难搜救的任务。在过去的十年中,生物机器人成为上述问题的一个解决方案。现阶段,生物机器人的导航和定位依赖各种复杂的辅助系统,如动作捕捉系统,gps导航定位系统。复杂的辅助系统限制了生物机器人在灾难搜救场景中的应用。此外,目前的生物机器人缺乏自动搜寻的能力。在幸存人员声音信息传递方面缺乏有效的途径。
4.专利一种基于电刺激的昆虫飞行行为控制的电路装置中,只介绍了基于甲虫的简单的刺激控制,在具体应用上缺乏探索。专利一种基于活体昆虫的无线视音频传输及飞行行为控制装置中,在刺激控制的基础上传输了音视频数据。两篇专利均在甲虫载体上进行飞行控制探究。缺乏导航和定位的能力,在灾难搜救和自动搜寻应用上缺乏研究和积累。
技术实现要素:
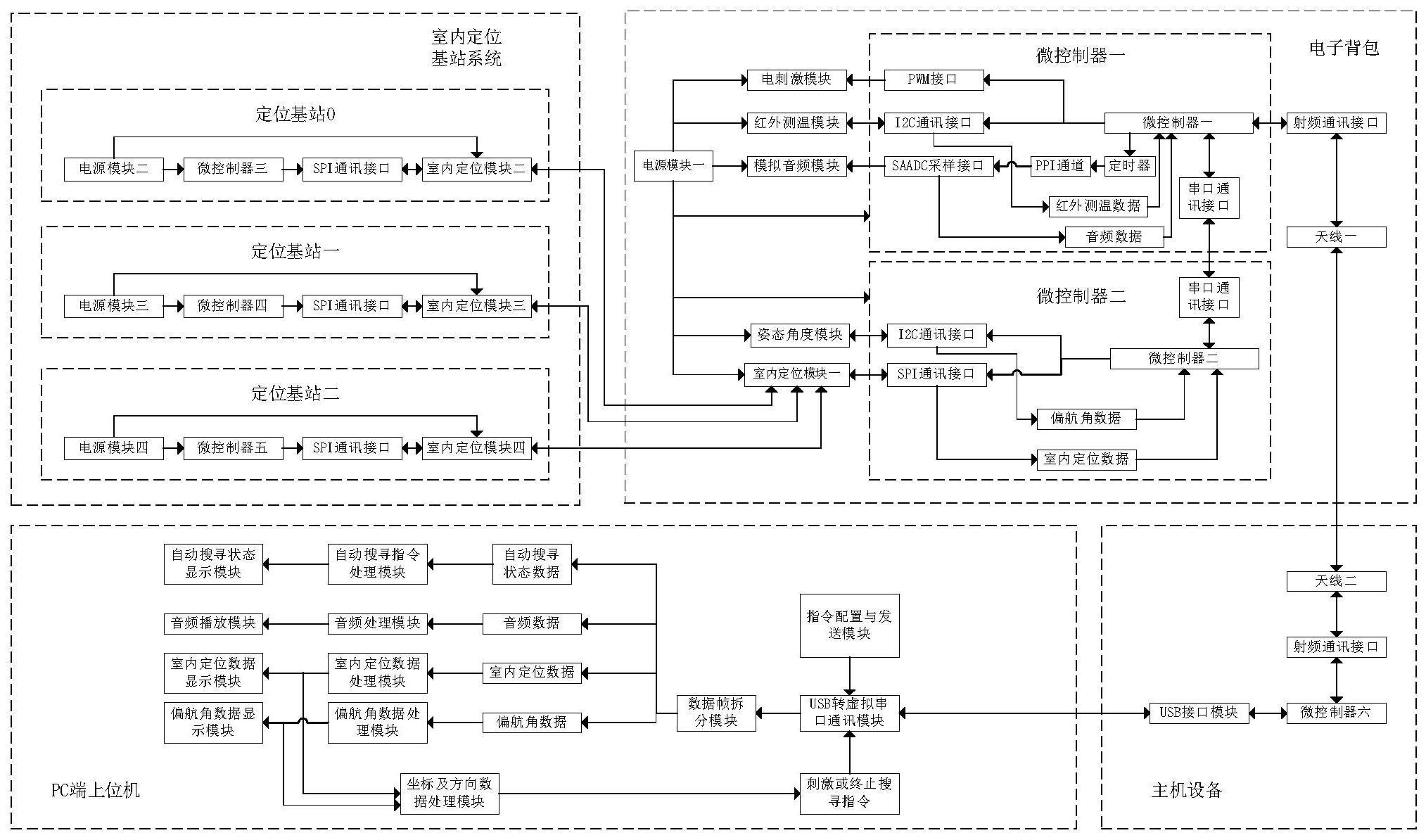
5.为解决上述问题,本发明公开了一种基于活体昆虫的爬行控制及自动搜寻的无线装置。该装置由室内定位基站系统、电子背包、主机设备和pc端上位机四部分组成。室内定位基站系统通过宽带脉冲通讯技术与电子背包无线连接。电子背包通过蓝牙技术与主机设备无线连接。主机设备通过usb通讯接口与pc端上位机有线连接。实现了昆虫机器人自动搜寻实验场地内的人员。解决了仿生机器人的续航时间短以及复杂狭小环境中仿生机器人的运动能力低和操控难度高的问题。
6.技术方案:所述室内定位基站系统由定位基站0、定位基站一和定位基站二组成。每个定位基站由电源模块、微控制器和室内定位模块组成。其中电源模块二、电源模块三和电源模块四由采用18650电芯的平头电池和线性稳压器组成,与微控制器和室内定位模块
相连接,用于给微控制器和室内定位模块供电;微控制器三、微控制器四和微控制器五为stm32芯片,室内定位模块二、室外模块三和室外模块四均为uwb定位模块。微控制器中的spi通讯接口与室内定位模块双向连接。室内定位模块二、室内定位模块三和室内定位模块四分别以无线的方式与电子背包中的室内定位模块一双向连接,用于采集室内定位模块二、室内定位模块三和室内定位模块四与室内定位模块一的距离数据;
7.所述电子背包由电源模块一、电刺激模块、红外测温模块、模拟音频模块、姿态角度模块、室内定位模块一、微控制器一、微控制器二、天线一组成。其中电源模块一由可充电的锂电池和线性稳压器组成,与电刺激模块、红外测温模块、模拟音频模块、姿态角度模块、室内定位模块一、微控制器一、微控制器二相连接,用于给电子背包中上述组件供电;微控制器一为蓝牙芯片,电刺激模块为弯插排针。微控制器一中的pwm接口与电刺激模块相连接,用于将昆虫刺激指令转化为相应的电刺激脉冲施加在昆虫的刺激点位上;红外测温模块由硅透镜、mems热电堆、asic和mcu组成。微控制器一中的i2c通讯接口与红外测温模块双向连接,用于红外测温数据的采集;模拟音频模块由模拟mems麦克风和运算放大电路组成。微控制器一中的定时器与ppi通道相连接,ppi通道与saadc采样接口相连接,saadc采样接口与模拟音频模块相连接。定时器产生滴答事件通过ppi通道触发saadc采样任务,采集音频数据;微控制器二为stm32芯片,姿态角度模块为九轴运动传感器。微控制器二中的i2c通讯接口与姿态角度模块双向连接,用于电子背包偏航角数据的采集;室内定位模块一为uwb定位模块。微控制器二中的spi通讯接口与室内定位模块一双向连接,室内定位模块一与室内定位模块二、室内定位模块三和室内定位模块四双向连接。用于采集室内定位模块一与室内定位模块二、室内定位模块三和室内定位模块四的距离数据。微控制器一的串口通讯接口与微控制器二的串口通讯接口双向连接。用于传输微控制器一发送给微控制器二的指令以及传输微控制器二发送给微控制器一的偏航角数据和室内定位数据;天线一为弹簧天线。微控制器一与射频通讯接口双向连接,射频通讯接口与天线一双向连接,天线一通过蓝牙技术以无线的方式与主机设备的天线二双向连接。用于传输电子背包发送给主机设备的传感器数据以及接收主机设备发送给电子背包的指令;
8.所述主机设备由微控制器六、usb接口模块和天线二组成。微控制器六为蓝牙芯片,天线二为板载天线。微控制器六与射频通讯接口双向连接,射频通讯接口与天线二双向连接,天线二与天线一双向连接。用于传输主机设备发送给电子背包的指令以及接收电子背包发送给主机设备的传感器数据;微控制器六与usb接口模块双向连接,usb接口模块以有线的方式与pc端的usb转虚拟串口通讯模块双向连接,用于传输主机设备发送给pc端上位机的传感器数据、接收pc端上位机发送给主机设备的指令以及给微控制器六供电;
9.所述pc端上位机由指令配置与发送模块、usb转串口通讯模块、数据帧拆分模块、自动搜寻指令处理模块、音频处理模块、室内定位数据处理模块、偏航角数据处理模块、自动搜寻状态显示模块、音频播放模块、室内定位数据显示模块、偏航角数据显示模块和坐标及方向数据处理模块组成。指令配置与发送模块与usb转虚拟串口通讯模块相连接,用于配置和发送室内定位模块及姿态角度模块开始采集指令和室内定位模块及姿态角度模块采集速度控制指令;usb转虚拟串口通讯模块与usb接口模块双向连接,usb转虚拟串口通讯模块与数据拆分模块相连接。用于传输pc端上位机发送给主机设备的指令、接收主机设备发送给pc端上位机的传感器数据以及将传感器数据传输至数据拆分模块;数据拆分模块用于
识别和拆分传感器数据;自动搜寻指令处理处理模块与自动搜寻状态显示模块相连接。自动搜寻状态数据通过自动搜寻指令处理模块处理后再调用自动搜寻状态显示模块,在pc端上位机上显示昆虫机器人的自动搜寻状态;音频处理模块与音频播放模块相连接。音频数据通过音频处理模块处理后再调用音频播放模块,在pc上位机上播放采集的音频;室内定位数据处理模块与室内定位显示模块相连接。室内定位数据通过室内定位数据处理模块处理后再调用室内定位显示模块,在pc上位机上显示昆虫机器人的实时二维坐标;偏航角数据处理模块与偏航角数据显示模块相连接。偏航角数据通过偏航角数据处理模块处理后再调用偏航角数据显示模块,在pc上位机上显示昆虫机器人的方向信息;室内定位数据处理模块与坐标及方向数据处理模块相连接,偏航角数据处理模块与坐标及方向数据处理模块相连接。用于处理室内定位数据、偏航角数据和目标坐标数据,生成刺激或终止搜寻指令,通过usb转虚拟串口通讯模块将指令传输到主机设备。
10.作为本发明的一种改进,所述电子背包指令接收和传感器数据采集及发送的实现包括以下步骤:
11.步骤(1)微控制器一等待接收上位机指令,若接收到指令,则判断接收到的指令类型,若未接收到指令,则处于等待接收上位机指令状态;
12.步骤(2)接着判断接收到指令的类型,若指令为昆虫刺激指令,则将昆虫刺激指令转化为相应的电刺激脉冲施加在昆虫的刺激点位上;若指令为室内定位模块及姿态角度模块开始采集指令和室内定位模块及姿态角度模块采集速度控制指令,则微控制器一通过串口将指令传输到微控制器二。若指令为室内定位模块及姿态角度模块关闭采集指令,则微控制器一通过串口将指令传输到微控制器二以及控制红外测温模块开启;
13.步骤(3)微控制器二通过串口接收到微控制器一发送的指令后,判断指令的类型,若指令为室内定位模块及姿态角度模块关闭采集指令,则微控制器二控制室内定位模块及姿态角度模块停止采集数据。若指令为室内定位模块及姿态角度模块开始采集指令和室内定位模块及姿态角度模块采集速度控制指令,则微控制器二控制室内定位模块及姿态角度模块采集数据,接着定位数据、偏航角数据和校验码组成特定数据帧,微控制器二通过串口将特定数据帧传输到微控制器一。微控制器一通过无线将特定数据帧传输到上位机;
14.步骤(4)红外测温模块开启后,微控制器一控制测温模块采集温度数据。根据温度数据判断昆虫机器人是否靠近人体,若昆虫机器人未靠近人体,则根据温度数据生成表示自动搜寻状态的特定数据帧,微控制器二通过串口将特定数据帧传输到微控制器一。微控制器一通过无线将特定数据帧传输到上位机。同时重复进行红外温度数据的采集。若昆虫机器人靠近人体,则微控制器一控制模拟音频模块开启;
15.步骤(5)控制模拟音频模块开启后,微控制器一控制模拟音频模块采集音频数据。音频数据和校验码组成特定数据帧,微控制器一通过无线将特定数据帧传输到上位机。
16.作为本发明的一种改进,所述电子背包定位及姿态数据采集的实现包括以下步骤:
17.步骤(1)室内定位模块一和姿态角度模块的初始化,首先对室内定位模块一初始化配置,然后对室内定位模块一的天线的延时参数进行设置,接着对姿态角度模块初始化配置,最后对数字运动处理器初始化配置;
18.步骤(2)开始测距,首先室内定位模块一向室内定位模块二发送poll信息,然后室
内定位模块一处于空闲等待状态,室内定位模块一等待接收室内定位模块二的response信息。若室内定位模块一收到室内定位模块二的response信息,则室内定位模块一向室内定位模块二发送final信息。否则室内定位模块一继续处于空闲等待状态;
19.步骤(3)室内定位模块一向室内定位模块二发送final信息后处于空闲等待状态。室内定位模块一等待接收室内定位模块二的距离信息。若室内定位模块一未收到室内定位模块二的距离信息,则室内定位模块一继续处于空闲等待状态。若室内定位模块一收到室内定位模块二的距离信息,则室内定位模块一再分别和室内定位模块三、室内定位模块四进行上述步骤的测距,获得室内定位模块一的三边室内定位数据;
20.步骤(4)通过姿态角度传感器中集成的运动数字处理器解算获取偏航角数据;
21.步骤(5)室内定位数据、偏航角数据和校验码组成成特定的数据帧。
22.作为本发明的一种改进,所述pc端上位机软件的实现包括以下步骤:
23.步骤(1)首先是在labview软件的前面板和程序框图中进行visa配置串口资源的初始化,在程序框图中设计串口接收数据和串口发送指令功能;
24.步骤(2)将室内定位模块及姿态角度模块开始采集指令和室内定位模块及姿态角度模块采集速度控制指令通过串口发送到主机设备。若发送指令是室内定位模块及姿态角度模块采集速度控制指令,则在串口发送指令的同时进行偏航角数据补偿。将串口接收主机设备的传感器数据传输至程序框图中的数据拆分模块,用于传感器数据的识别和拆分;
25.步骤(3)若传感器数据为自动搜寻状态数据,通过程序框图中的字符串匹配模式函数,判断昆虫机器人的自动搜寻状态,在前面板上点亮对应的布尔类型的指示灯以表示昆虫机器人的自动搜寻状态;若传感器数据为音频数据,首先在程序框图中使用配置声音数据函数设置采样模式、每通道采样数、播放设备id和声音格式参数,然后通过在程序框图中使用写入声音输出函数调用pc扬声器播放音频并且在前面板上显示音频波形,播放音频数据结束后调用声音输出清零函数使设备停止播放音频,清空缓存并清除与音频播放任务相关的资源;若传感器数据为室内定位数据,首先在程序框图中将表示距离的字节数组复原为双精度浮点数进行三边距离数据复原,然后通过在程序框图中设计三边定位算法获得电子背包实时坐标。接着在前面板上使用坐标图控件显示电子背包的实时坐标;若传感器数据为偏航角数据,首先将表示偏航角数据的字节数组复原为双精度浮点数进行偏航角数据复原,然后通过在在前面板上使用数值旋钮控件显示电子背包实时方向;
26.步骤(4)获取电子背包的坐标和方向数据后,结合目标坐标数据,通过计算电子背包的方向、坐标和目标坐标数据,得到室内定位模块及姿态角度模块关闭采集指令和昆虫刺激指令;
27.步骤(5)将室内定位模块及姿态角度模块关闭采集指令和昆虫刺激指令通过串口发送到主机设备上。
28.本发明的有益效果:
29.(1)本发明中的昆虫机器人以昆虫作为载体以及通过在昆虫背部安装电子背包的方式,使昆虫机器人兼具昆虫的运动能力和机器人的可操作性。由于在昆虫特定的神经肌肉组织施加电刺激脉冲,以控制昆虫机器人朝指定的方向上运动。这使得整个系统能耗低以及能够适应复杂的地形环境。
30.(2)本发明中通过在轻质电子背包上集成室内定位模块和姿态角度模块,可以实
时获取昆虫机器人的坐标和方向,具有定位精度高的特点。室内定位数据和偏航角数据传输到pc端上位机进行解算,产生昆虫刺激指令,可以自动控制昆虫机器人运动到目标坐标附近进行自动搜寻任务。整个电子背包系统质量轻、体积小。
31.(3)本发明中通过在轻质电子背包上集成红外测温模块和音频模块,可以实时获取环境中的温度和声音信息。通过红外测温模块采集的温度数据,自动产生昆虫刺激指令,使得昆虫机器人自动搜寻目标坐标周围的人类。整个过程无需人工干预,具有自主性和独立性。
32.(4)本发明中的电子背包上使用两块微控制器采集传感器数据,两块微控制器之间指令和数据的传输使通过串口通讯完成的,减少了系统的复杂度,提升了电子背包的负载能力和运算处理能力。
附图说明
33.图1为本发明的整体结构示意图;
34.图2为电子背包指令接收和传感器数据采集及发送流程图;
35.图3为电子背包定位及姿态数据采集示意图;
36.图4为pc端上位机软件实现示意图。
具体实施方式
37.下面结合附图和具体实施方式,进一步阐明本发明,应理解下述具体实施方式仅用于说明本发明而不用于限制本发明的范围。需要说明的是,下面描述中使用的词语“前”、“后”、“左”、“右”、“上”和“下”指的是附图中的方向,词语“内”和“外”分别指的是朝向或远离特定部件几何中心的方向。
38.图1为本发明的整体结构示意图。本实施例是一种基于活体昆虫的爬行控制及自动搜寻的无线装置。该装置由室内定位基站系统、电子背包、主机设备和pc端上位机四部分组成。室内定位基站系统通过宽带脉冲通讯技术与电子背包无线连接。电子背包通过蓝牙技术与主机设备无线连接。主机设备通过usb通讯接口与pc端上位机有线连接。
39.所述室内定位基站系统由定位基站0、定位基站一和定位基站二组成。每个定位基站由电源模块、微控制器和室内定位模块组成。其中电源模块二、电源模块三和电源模块四由采用18650电芯的平头电池和线性稳压器组成,与微控制器和室内定位模块相连接,用于给微控制器和室内定位模块提供3.3伏电压的供电;微控制器三、微控制器四和微控制器五为stm32f103c6t6a芯片,室内定位模块二、室内定位模块三和室内定位模块四为dwm1000模块。微控制器中的spi通讯接口与室内定位模块双向连接。室内定位模块二、室内定位模块三和室内定位模块四分别以无线的方式与电子背包中的室内定位模块一双向连接,用于采集室内定位模块二、室内定位模块三和室内定位模块四与室内定位模块一的距离数据,三边距离数据结合三个定位基站的坐标通过三边定位算法可以解算出定位模块一的二维坐标,进而获得昆虫机器人的坐标;
40.所述电子背包由电源模块一、电刺激模块、红外测温模块、模拟音频模块、姿态角度模块、室内定位模块一、微控制器一、微控制器二、天线一组成。其中电源模块一由可充电的锂电池和线性稳压器组成,与电刺激模块、红外测温模块、模拟音频模块、姿态角度模块、
室内定位模块一、微控制器一、微控制器二相连接,用于给电子背包中上述组件供电;微控制器一为nrf52840,电刺激模块为弯插排针。微控制器一中的pwm接口与电刺激模块相连接,用于将昆虫刺激指令转化为相应的电刺激脉冲施加在昆虫的刺激点位上,达到控制昆虫机器人朝预定的方向上运动;红外测温模块为d6t-44l-06,由硅透镜、mems热电堆、asic和mcu组成。测温模块采集视角横轴方向为44.2
°
,纵轴方向为45.7
°
。采集温度的范围为0到50摄氏度。红外测温模块的像素矩阵为4
×
4个。微控制器一中的i2c通讯接口与红外测温模块双向连接,用于红外测温数据的采集;模拟音频模块由模拟mems麦克风和运算放大电路组成。微控制器一中的定时器与ppi通道相连接,ppi通道与saadc采样接口相连接,saadc采样接口与模拟音频模块相连接。定时器产生滴答事件通过ppi通道触发saadc采样任务,采集音频数据;微控制器二为stm32f103cbu6芯片,姿态角度模块为mpu9250。微控制器二中的i2c通讯接口与姿态角度模块双向连接,用于电子背包偏航角数据的采集;室内定位模块一为dwm1000。微控制器二中的spi通讯接口与室内定位模块一双向连接,室内定位模块一与室内定位模块二、室内位模块三和室内定位模块四双向连接。用于采集室内定位模块一与室内定位模块二、室内定位模块三和室内定位模块四的距离数据。微控制器一的串口通讯接口与微控制器二的串口通讯接口双向连接。用于传输微控制器一发送给微控制器二的指令以及传输微控制器二发送给微控制器一的偏航角数据和室内定位数据;天线一为弹簧天线。微控制器一与射频通讯接口双向连接,射频通讯接口与天线一双向连接,天线一通过蓝牙技术以无线的方式与主机设备的天线二双向连接。用于传输电子背包发送给主机设备的传感器数据以及接收主机设备发送给电子背包的指令;
41.所述主机设备由微控制器六、usb接口模块和天线二组成。微控制器六为nrf52840,天线二为板载天线。微控制器六与射频通讯接口双向连接,射频通讯接口与天线二双向连接,天线二与天线一双向连接。用于传输主机设备发送给电子背包的指令以及接收电子背包发送给主机设备的传感器数据;微控制器六与usb接口模块双向连接,usb接口模块以有线的方式与pc端的usb转虚拟串口通讯模块双向连接,用于传输主机设备发送给pc端上位机的传感器数据、接收pc端上位机发送给主机设备的指令以及为微控制器六供电;
42.所述pc端上位机由指令配置与发送模块、usb转串口通讯模块、数据帧拆分模块、自动搜寻指令处理模块、音频处理模块、室内定位数据处理模块、偏航角数据处理模块、自动搜寻状态显示模块、音频播放模块、室内定位数据显示模块、偏航角数据显示模块和坐标及方向数据处理模块组成。指令配置与发送模块与usb转虚拟串口通讯模块相连接,用于配置和发送室内定位模块及姿态角度模块开始采集指令和室内定位模块及姿态角度模块采集速度控制指令;usb转虚拟串口通讯模块与usb接口模块双向连接,usb转虚拟串口通讯模块与数据拆分模块相连接。用于传输pc端上位机发送给主机设备的指令、接收主机设备发送给pc端上位机的传感器数据以及将传感器数据传输至数据拆分模块;数据拆分模块用于识别和拆分传感器数据;自动搜寻指令处理处理模块与自动搜寻状态显示模块相连接。自动搜寻状态数据通过自动搜寻指令处理模块处理后再调用自动搜寻状态显示模块,在pc端上位机上显示昆虫机器人的自动搜寻状态;音频处理模块与音频播放模块相连接。音频数据通过音频处理模块处理后再调用音频播放模块,在pc上位机上播放采集的音频;室内定位数据处理模块与室内定位显示模块相连接。室内定位数据通过室内定位数据处理模块处
理后再调用室内定位显示模块,在pc上位机上显示昆虫机器人的实时二维坐标;偏航角数据处理模块与偏航角数据显示模块相连接。偏航角数据通过偏航角数据处理模块处理后再调用偏航角数据显示模块,在pc上位机上显示昆虫机器人的方向信息;室内定位数据处理模块与坐标及方向数据处理模块相连接,偏航角数据处理模块与坐标及方向数据处理模块相连接。用于处理室内定位数据、偏航角数据和目标坐标数据,生成刺激或终止搜寻指令,通过usb转虚拟串口通讯模块将指令传输到主机设备。
43.图2为电子背包指令接收和传感器数据采集及发送流程图。所述电子背包指令接收和传感器数据采集及发送的实现包括以下步骤:
44.步骤(1)微控制器一等待接收上位机指令,若接收到指令,则判断接收到的指令类型,若未接收到指令,则处于等待接收上位机指令状态;
45.步骤(2)接着判断接收到指令的类型,若指令为昆虫刺激指令,则将昆虫刺激指令转化为相应的电刺激脉冲施加在昆虫的刺激点位上;若指令为室内定位模块及姿态角度模块开始采集指令和室内定位模块及姿态角度模块采集速度控制指令,则微控制器一通过串口将指令传输到微控制器二。若指令为室内定位模块及姿态角度模块关闭采集指令,则微控制器一通过串口将指令传输到微控制器二以及控制红外测温模块开启;
46.步骤(3)微控制器二通过串口接收到微控制器一发送的指令后,判断指令的类型,若指令为室内定位模块及姿态角度模块关闭采集指令,则微控制器二控制室内定位模块及姿态角度模块停止采集数据。若指令为室内定位模块及姿态角度模块开始采集指令和室内定位模块及姿态角度模块采集速度控制指令,则微控制器二控制室内定位模块及姿态角度模块采集数据,接着定位数据、偏航角数据和校验码组成特定数据帧,微控制器二通过串口将特定数据帧传输到微控制器一。微控制器一通过无线将特定数据帧传输到上位机;
47.步骤(4)红外测温模块开启后,微控制器一控制测温模块采集温度数据。根据温度数据判断昆虫机器人是否靠近人体,若昆虫机器人未靠近人体,则根据温度数据生成表示自动搜寻状态的特定数据帧,微控制器二通过串口将特定数据帧传输到微控制器一。微控制器一通过无线将特定数据帧传输到上位机。同时重复进行红外温度数据的采集。若昆虫机器人靠近人体,则微控制器一控制模拟音频模块开启;
48.步骤(5)控制模拟音频模块开启后,微控制器一控制模拟音频模块采集音频数据。音频数据和校验码组成特定数据帧,微控制器一通过无线将特定数据帧传输到上位机。
49.图3为电子背包定位及姿态数据采集示意图。所述电子背包定位及姿态数据采集的实现包括以下步骤:
50.步骤(1)室内定位模块一和姿态角度模块的初始化,首先对室内定位模块一初始化配置,然后对室内定位模块一天线的延时参数进行设置,接着对姿态角度模块初始化配置,最后对数字运动处理器初始化配置;
51.步骤(2)开始测距,首先室内定位模块一向室内定位模块二发送poll信息,然后室内定位模块一处于空闲等待状态,室内定位模块一等待接收室内定位模块二的response信息。若室内定位模块一收到室内定位模块二的response信息,则室内定位模块一向室内定位模块二发送final信息。否则室内定位模块一继续处于空闲等待状态;
52.步骤(3)室内定位模块一向室内定位模块二发送final信息后处于空闲等待状态。室内定位模块一等待接收室内定位模块二的距离信息。若室内定位模块一未收到室内定位
模块二的距离信息,则室内定位模块一继续处于空闲等待状态。若室内定位模块一收到室内定位模块二的距离信息,则室内定位模块一再分别和室内定位模块三、室内定位模块四进行上述步骤的测距,获得室内定位模块一的三边室内定位数据;
53.步骤(4)通过姿态角度传感器中集成的运动数字处理器解算获取偏航角数据;
54.步骤(5)室内定位数据、偏航角数据和校验码组成成特定的数据帧。
55.图4为pc端上位机软件实现示意图。所述pc端上位机软件的实现包括以下步骤:
56.步骤(1)首先是在labview软件的前面板和程序框图中进行visa配置串口资源的初始化,在程序框图中设计串口接收数据和串口发送指令功能;
57.步骤(2)将室内定位模块及姿态角度模块开始采集指令和室内定位模块及姿态角度模块采集速度控制指令通过串口发送到主机设备。若发送指令是室内定位模块及姿态角度模块采集速度控制指令,则在串口发送指令的同时进行偏航角数据补偿。将串口接收主机设备的传感器数据传输至程序框图中的数据拆分模块,用于传感器数据的识别和拆分;
58.步骤(3)若传感器数据为自动搜寻状态数据,通过程序框图中的字符串匹配模式函数,判断昆虫机器人的自动搜寻状态,在前面板上点亮对应的布尔类型的指示灯以表示昆虫机器人的自动搜寻状态;若传感器数据为音频数据,首先在程序框图中使用配置声音数据函数设置采样模式、每通道采样数、播放设备id和声音格式参数,然后通过在程序框图中使用写入声音输出函数调用pc扬声器播放音频并且在前面板上显示音频波形,播放音频数据结束后调用声音输出清零函数使设备停止播放音频,清空缓存并清除与音频播放任务相关的资源;若传感器数据为室内定位数据,首先在程序框图中将表示距离的字节数组复原为双精度浮点数进行三边距离数据复原,然后通过在程序框图中设计三边定位算法获得电子背包实时坐标。接着在前面板上使用坐标图控件显示电子背包的实时坐标;若传感器数据为偏航角数据,首先将表示偏航角数据的字节数组复原为双精度浮点数进行偏航角数据复原,然后通过在在前面板上使用数值旋钮控件显示电子背包实时方向;
59.步骤(4)获取电子背包的坐标和方向数据后,结合目标坐标数据,通过计算电子背包的方向、坐标和目标坐标数据,得到室内定位模块及姿态角度模块关闭采集指令和昆虫刺激指令;
60.步骤(5)将室内定位模块及姿态角度模块关闭采集指令和昆虫刺激指令通过串口发送到主机设备上。
61.本发明方案所公开的技术手段不仅限于上述实施方式所公开的技术手段,还包括由以上技术特征任意组合所组成的技术方案。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。