一种基于风速仪修正的三维空间pm2.5移动监测方法
技术领域
1.本发明涉及一种基于风速仪修正的三维空间pm2.5移动监测方法,属于污染监测方法领域。
背景技术:
2.pm2.5是指大气中直径小于或等于2.5微米的颗粒物,也称为可入肺颗粒物。它的直径还不到人的头发丝粗细的1/20。pm2.5颗粒径小,含有大量的有毒、有害物质,且在大气中的停留时间长、输送距离远,被称为大气污染的元凶。pm2.5的污染对人和环境造成很大的影响,对pm2.5浓度的监测已迫在眉睫。随着时代的发展,城市环境污染问题愈发突出,且地表可利用空间减少,迫使人类发展逐渐由地面向高空延伸。居民的生产生活与城市微观环境的关系变得更为密切,揭示微观环境下三维空间的pm2.5时空分布规律,能够为城市规划、区域发展、居民健康等提供参考。宏观尺度下的地表空气污染研究虽较为普及,但不能满足现代社会发展的需求。目前所存在的移动监测方法受气象因素影响较大,其中尤其是风速对于pm2.5浓度的影响巨大,在恶劣气象条件下无法进行pm2.5的真实值监测。
技术实现要素:
3.针对上述现有技术存在的问题,本发明提供一种基于风速仪修正的三维空间pm2.5移动监测方法,根据风速修正函数,对pm2.5监测结果进行修正,从而获取监测点精确的浓度数据,解决了当前pm2.5移动监测受风速影响的问题,进一步提高了pm2.5移动监测的精度。
4.为了实现上述目的,本发明采用的技术方案是:一种基于风速仪修正的三维空间pm2.5移动监测方法,包括一下步骤:
5.步骤s1:使用pm2.5浓度监测设备与风速仪构成监测模块,在监测pm2.5浓度的同时获取实时风速;可以作为监测模块搭载于各种遥感平台;
6.步骤s2:通过单因素实验探究风速对pm2.5浓度的影响,得到风速与pm2.5浓度的关系,构建风速修正函数;
7.步骤s3:使用搭载pm2.5监测仪器和风速仪的移动平台进行采样,结合定位模块获取经纬度和高程数据,储存三维空间内各采样点的空气污染数据和实时风速数据;
8.步骤s4:基于实时风速数据,通过风速修正函数对pm2.5监测结果进行改正,从而获取监测点精确的浓度数据。
9.进一步的,所述步骤s1中pm2.5浓度监测设备为尺寸小于标准范围:120mm x 100mm x 50mm,质量小于等于500g;其中采集pm2.5数据所用的传感器测量频率大于等于1hz。
10.进一步的,所述步骤s1中风速仪的风速测量范围:0m/s~60m/s(抗风强度:70m/s),风速测量分辨率:0.1m/s,风速测量精度:
±
(0.3 0.03v)m/s(v指实际风速),风速传感器启动风速:≤0.5m/s。
11.进一步的,所述步骤s1中pm2.5浓度监测设备与风速仪的总质量区间为700~1200g,其搭载在无人机的遥感平台上,便于获取各采样点的空气污染数据和实时的风速数据。
12.进一步的,所述步骤s2具体为:
13.s21:设计单因素实验,探究风速对pm2.5浓度的影响关系;
14.s22:通过监测选取实验区域,范围为5m*5m*5m即125m3的立方体区域,以1m为间距设置采样点,pm2.5浓度数值波动不超过10ug/m3,即为优质实验区域;
15.s23:改变单一变量:在0m/s~50m/s范围内以1m/s为间隔,递增改变风速,保持其他环境因素一致,使用本模块对pm2.5浓度和风速进行监测记录;
16.s24:为保证实验结果的准确,在同一风速下,记录三次pm2.5浓度和风速,取平均值作为实验数据;
17.s24:根据单因素实验记录数据,使用ols线性回归模型,将风速y作为自变量,pm2.5浓度x作为因变量,由此计算得出风速修正函数:y=f(x)。
18.进一步的,所述步骤s3具体为:
19.s31:使用无人机搭载本监测模块:包含pm2.5监测设备和风速仪,使用前进行试飞,确保飞行时监测模块可以正常运行;
20.s32:设置pm2.5监测点,导入点数据至飞行器地面站,对监测点进行航迹规划;
21.s33:选择使用最短航线,并根据采样地区的高度设置安全飞行速度;
22.s34:实验准备时,测试无人机旋翼启动与关闭时空气质量检测仪读数差异,综合多次测试,剔除飞行测量时因为桨叶造成的气流扰动对实验数据的影响;
23.s35:实验人员使用fpv眼镜在第一视角下实时观察无人机是否按照预设航线飞行,并及时纠正飞行问题;
24.s36:将空气质量检测仪器和风速仪的监测结果实时回传;
25.s37:使用无人机定位模块提供的经纬度数据以及海拔数据,将采样点精确的污染浓度数据作为属性存储;
26.s38:记录风速仪监测的实时风速,并匹配至相应pm2.5监测数据进行保存。
27.进一步的,所述步骤4具体为:
28.s41:通过风速修正函数对pm2.5监测结果进行修正,得到修正后的pm2.5浓度值;
29.s42:将无人机定位模块获取的信息,包含经纬度,海拔三个数据,作为标签赋予修正后的pm2.5浓度值,由此获得实测区域内三维空间高精度的空气污染浓度信息。
30.本发明的有益效果是:该方法解决了当前pm2.5移动监测受风速影响的问题,进一步提高了pm2.5移动监测的精度。并且本监测模块体积小,质量轻,适合多种移动平台搭载,例如无人机,遥控测量船等,解决了传统移动监测采样范围同质性高的问题。
附图说明
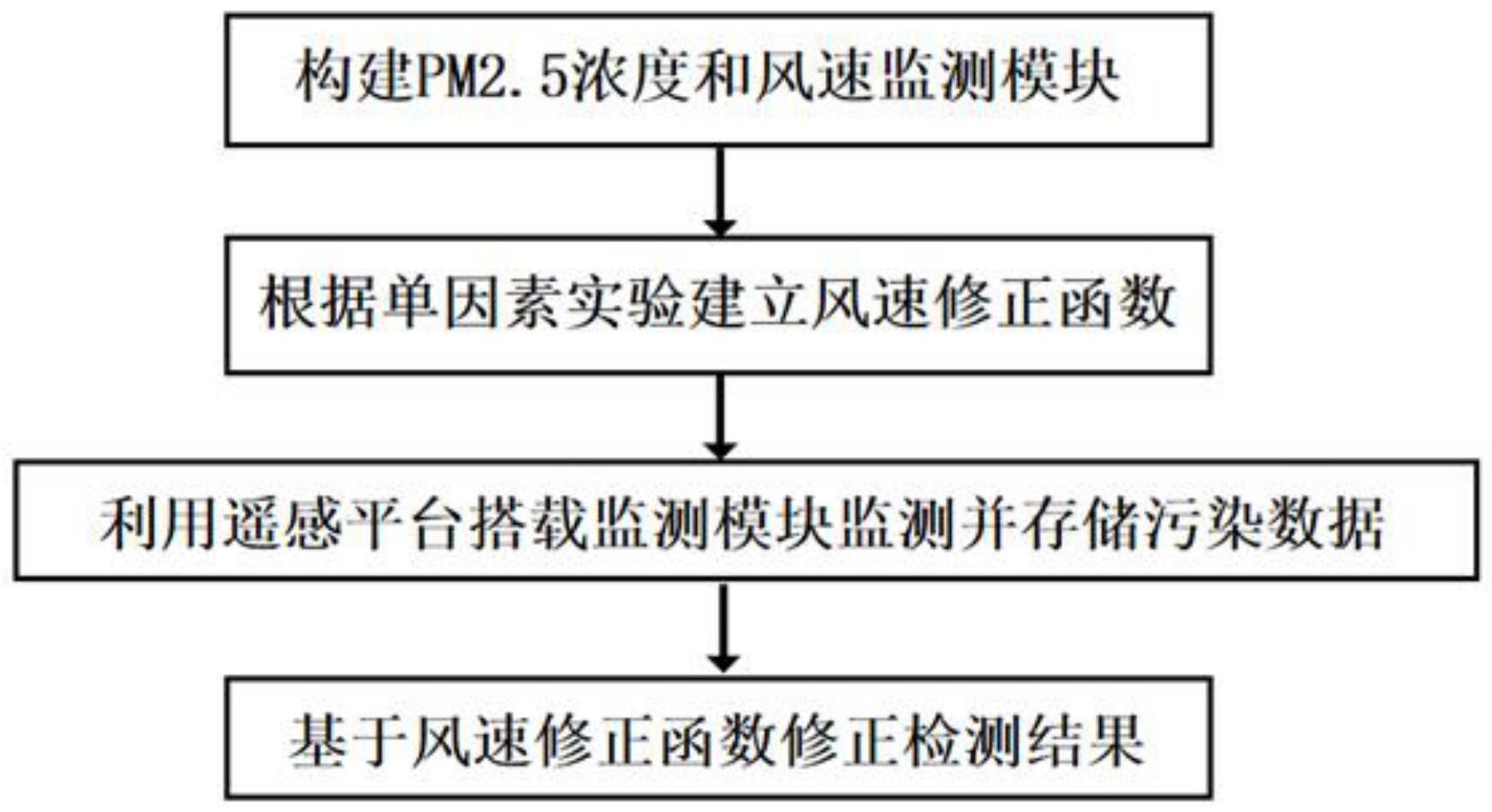
31.图1为本发明的一种基于风速仪修正的三维空间pm2.5移动监测方法的流程示意图;
32.图2为本发明的一种基于风速仪修正的三维空间pm2.5移动监测方法实施例的基于风速仪修正的pm2.5浓度结果示意图。
具体实施方式
33.为使本发明的目的、技术方案和优点更加清楚明了,下面通过附图及实施例,对本发明进行进一步详细说明。但是应该理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限制本发明的范围。
34.除非另有定义,本文所使用的所有的技术术语和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同,本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。
35.参照图1,图2所示,一种基于风速仪修正的三维空间pm2.5移动监测方法,包含以下步骤:
36.s1:本方法使用pm2.5浓度监测设备与风速仪构成监测模块,在监测pm2.5浓度的同时获取实时风速;该模块尺寸较小,可以作为监测模块搭载于各种遥感平台;
37.s11:本发明所使用的便携式空气质量监测仪要求尺寸小于标准范围:120mm x 100mm x 50mm,质量小于等于500g。其中采集pm2.5数据所用的传感器测量频率大于等于1hz,即可以较为准确的反映微观环境pm2.5情况;
38.s12:本发明所使用的风速仪要求风速测量范围:0m/s~60m/s(抗风强度:70m/s),风速测量分辨率:0.1m/s,风速测量精度:
±
(0.3 0.03v)m/s(v指实际风速),风速传感器启动风速:≤0.5m/s;
39.s13:本发明所使用的设备总质量区间为700~1200g,质量小,便于携带,或作为监测模块搭载于各类遥感监测平台。例如,使用无人机搭载本监测模块,对无人机载重要求较低,对型号限制较小,便于获取各采样点的空气污染数据和实时的风速数据;
40.s2:通过单因素实验探究风速对pm2.5浓度的影响,得到风速与pm2.5浓度的关系,构建风速修正函数;
41.s21:设计单因素实验,探究风速对pm2.5浓度的影响关系;
42.s22:通过监测选取实验区域,范围为5m*5m*5m即125立方米的立方体区域。以1m为间距设置采样点,pm2.5浓度数值波动不超过10ug/m3,即为优质实验区域;
43.s23:改变单一变量:在0m/s~50m/s范围内以1m/s为间隔,递增改变风速,保持系统其他因素一致。使用本模块对pm2.5和风速进行监测记录;
44.s24:为了保证实验结果的准确,在同一风速下,记录三次pm2.5浓度和风速,取平均值作为实验数据;
45.s25:根据单因素实验记录数据,使用ols线性回归模型,将风速y作为自变量,pm2.5浓度x作为因变量,由此计算得出风速修正函数:y=f(x);
46.s3:使用搭载pm2.5监测仪器和风速仪的移动平台进行采样,结合定位模块获取经纬度和高程数据,储存三维空间内各采样点的空气污染数据和实时风速数据;
47.s31:使用无人机搭载本监测模块:包含pm2.5监测设备和风速仪,使用前进行试飞,确保飞行时监测模块可以正常运行;
48.s32:设置pm2.5监测点,导入点数据至飞行器地面站,对监测点进行航迹规划。
49.s33:选择使用最短航线,并根据采样地区的高度设置安全飞行速度;
50.s34:实验准备时,测试无人机旋翼启动与关闭时空气质量检测仪读数差异,综合多次测试,剔除飞行测量时因为桨叶造成的气流扰动对实验数据的影响;
51.s35:实验人员使用fpv眼镜在第一视角下实时观察无人机是否按照预设航线飞行,并及时纠正飞行问题
52.s36:将空气质量检测仪器和风速仪的监测结果实时回传;
53.s37:使用无人机定位模块提供的经纬度数据以及海拔数据,将采样点精确的污染浓度数据作为属性存储;
54.s38:记录风速仪监测的实时风速,并匹配至相应pm2.5监测数据进行保存。;
55.s4:基于实时风速数据,通过风速修正函数对pm2.5监测结果进行改正,从而获取监测点精确的浓度数据;
56.s41:根据pm2.5浓度测量结果,及其对应的风速,通过风速改正函数对pm2.5监测结果进行修正,得到修正后的pm2.5浓度值(如图2);
57.s42:将无人机定位模块获取的信息,包含经纬度,海拔三个数据,作为标签赋予修正后的pm2.5浓度值,由此获得实验样区内三维空间高精度的空气污染浓度信息。
58.本发明的有益效果是:首先,通过组合pm2.5浓度监测设备和风速仪构成监测模块;其次,设计单因素实验,探究风速对pm2.5浓度的影响,得到风速与pm2.5浓度的关系,构建风速修正函数;再次,使用移动平台搭载pm2.5监测仪器和风速监测仪器进行采样,结合移动平台的定位模块获取的经纬度和高程数据,储存各采样点精确的空气污染数据和实时的风速数据;最后,根据风速与pm2.5浓度的函数关系,对pm2.5监测结果进行修正,从而获取分布在三维空间内监测点精确的pm2.5浓度数据。该方法解决了当前pm2.5移动监测受风速影响的问题,进一步提高了pm2.5移动监测的精度。并且本监测模块体积小,质量轻,适合多种移动平台搭载,例如无人机,遥控测量船等,解决了传统移动监测采样范围同质性高的问题。
59.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换或改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。