技术特征:
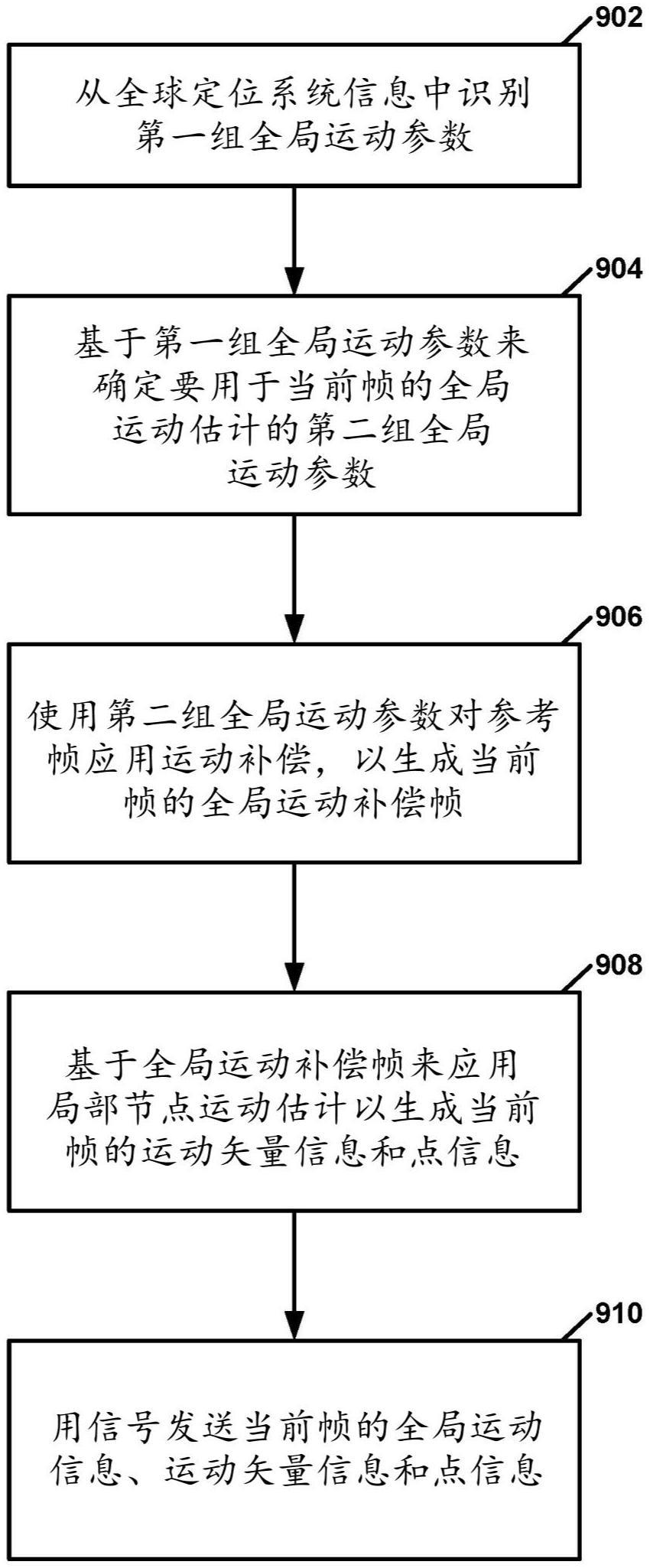
1.一种用于对点云数据进行编码的设备,所述设备包括:存储器,所述存储器用于存储所述点云数据;以及一个或多个处理器,所述一个或多个处理器耦合到所述存储器并在电路中实现,所述一个或多个处理器被配置为:从全球定位系统信息中识别第一组全局运动参数;基于所述第一组全局运动参数来确定要用于当前帧的全局运动估计的第二组全局运动参数;以及基于所述第二组全局运动参数来对参考帧应用运动补偿以生成所述当前帧的全局运动补偿帧。2.根据权利要求1所述的设备,其中所述一个或多个处理器被配置为在比特流中用信号发送所述第二组全局运动参数。3.根据权利要求1所述的设备,其中所述一个或多个处理器被配置为在比特流中用信号发送所述第一组全局运动参数。4.根据权利要求1所述的设备,其中所述第一组全局运动参数包括一组定向参数。5.根据权利要求4所述的设备,其中所述一组定向参数包括所述当前帧的滚转、俯仰、偏航或角速度中的一个或多个。6.根据权利要求4所述的设备,其中所述一组定向参数包括所述当前帧与参考帧之间的滚转差、所述当前帧与所述参考帧之间的俯仰差、所述当前帧与所述帧之间的偏航差、或所述当前帧与所述参考帧之间的角速度差中的一个或多个。7.根据权利要求1所述的设备,其中所述第一组全局运动参数包括一组定位参数。8.根据权利要求7所述的设备,其中所述一组定位参数包括所述当前帧的位移或所述当前帧的平均速度中的一个或多个。9.根据权利要求7所述的设备,其中所述一组定位参数包括东-北-上坐标系的东速度、北速度或上速度中的一个或多个。10.根据权利要求1所述的设备,其中所述第二组全局运动参数包括指示所述当前帧的偏航、俯仰和滚转的旋转矩阵和指示所述当前帧的平均速度的平移矢量。11.根据权利要求1所述的设备,其中所述一个或多个处理器被配置为用信号发送所述当前帧的滚转、所述当前帧的俯仰、所述当前帧的偏航以及指示所述当前帧的平均速度的平移矢量。12.根据权利要求1所述的设备,其中所述一个或多个处理器被配置为用信号发送所述当前帧与参考帧之间的滚转差、所述当前帧与所述参考帧之间的俯仰差、所述当前帧与所述参考帧之间的偏航差以及指示所述当前帧的平均速度的平移矢量。13.根据权利要求1所述的设备,其中所述一个或多个处理器被配置为用信号发送指示所述当前帧的平均速度的平移矢量,并且避免用信号发送指示所述当前帧的偏航、俯仰和滚转的旋转矩阵。14.根据权利要求1所述的设备,其中所述一个或多个处理器被配置为用信号发送指示所述当前帧的平均速度的平移矢量的幅度。15.根据权利要求1所述的设备,其中所述一个或多个处理器被配置为基于所述全局运动补偿帧针对所述当前帧执行运动矢量估计,并且其中,为了执行运动矢量估计,所述一个
或多个处理器被配置为将局部运动的块大小限制为等于最小预测单元大小。16.根据权利要求1所述的设备,其中所述参考帧是第一参考帧,并且所述当前帧是第一当前帧,并且其中所述一个或多个处理器被配置为通过最小化第二当前帧与第二参考帧之间的均方误差来估计初始平移矢量。17.根据权利要求1所述的设备,其中所述当前帧是第一当前帧,并且其中所述一个或多个处理器被配置为:确定点是否是地面的;以及基于所述点是否是地面的来估计第二当前帧的旋转矩阵。18.根据权利要求17所述的设备,其中所述一个或多个处理器被配置为用信号发送指示所述点是否是地面的的一组标签。19.根据权利要求1所述的设备,其中所述一个或多个处理器还被配置为生成所述点云数据。20.根据权利要求19所述的设备,其中所述一个或多个处理器被配置为,作为生成所述点云数据的一部分,基于来自lidar装置的信号生成所述点云数据。21.根据权利要求1所述的设备,其中所述设备是移动电话、平板电脑、车辆或扩展现实设备中的一个。22.根据权利要求1所述的设备,其中所述设备包括被配置为传输编码点云数据的接口。23.一种用于对点云数据进行编码的方法,所述方法包括:利用一个或多个处理器,从全球定位系统信息中识别第一组全局运动参数;利用一个或多个处理器,基于所述第一组全局运动参数来确定要用于当前帧的全局运动估计的第二组全局运动参数;以及利用一个或多个处理器,基于所述第二组全局运动参数来对参考帧应用运动补偿以生成所述当前帧的全局运动补偿帧。24.根据权利要求23所述的方法,还包括利用所述一个或多个处理器在比特流中用信号发送所述第二组全局运动参数。25.根据权利要求23所述的方法,还包括利用所述一个或多个处理器在比特流中用信号发送所述第一组全局运动参数。26.根据权利要求23所述的方法,其中所述第一组全局运动参数包括一组定向参数。27.根据权利要求26所述的方法,其中所述一组定向参数包括所述当前帧的滚转、俯仰、偏航或角速度中的一个或多个。28.根据权利要求26所述的方法,其中所述一组定向参数包括所述当前帧与参考帧之间的滚转差、所述当前帧与所述参考帧之间的俯仰差、所述当前帧与所述帧之间的偏航差、或所述当前帧与所述参考帧之间的角速度差中的一个或多个。29.根据权利要求23所述的方法,其中所述第一组全局运动参数包括一组定位参数。30.根据权利要求29所述的方法,其中所述一组定位参数包括所述当前帧的位移或所述当前帧的平均速度中的一个或多个。31.根据权利要求29所述的方法,其中所述一组定位参数包括东-北-上坐标系的东速度、北速度或上速度中的一个或多个。
32.根据权利要求23所述的方法,其中所述第二组全局运动参数包括指示所述当前帧的偏航、俯仰和滚转的旋转矩阵和指示所述当前帧的平均速度的平移矢量。33.根据权利要求23所述的方法,还包括用信号发送所述当前帧的滚转、所述当前帧的俯仰、所述当前帧的偏航以及指示所述当前帧的平均速度的平移矢量。34.根据权利要求23所述的方法,还包括用信号发送所述当前帧与参考帧之间的滚转差、所述当前帧与所述参考帧之间的俯仰差、所述当前帧与所述参考帧之间的偏航差以及指示所述当前帧的平均速度的平移矢量。35.根据权利要求23所述的方法,还包括利用所述一个或多个处理器用信号发送指示所述当前帧的平均速度的平移矢量,并且避免用信号发送指示所述当前帧的偏航、俯仰和滚转的旋转矩阵。36.根据权利要求23所述的方法,还包括利用所述一个或多个处理器用信号发送指示所述当前帧的平均速度的平移矢量的幅度。37.根据权利要求23所述的方法,还包括利用所述一个或多个处理器基于所述全局运动补偿帧来针对所述当前帧执行运动矢量估计,并且其中执行运动矢量估计包括将局部运动的块大小限制为等于最小预测单元大小。38.根据权利要求23所述的方法,其中所述参考帧是第一参考帧,并且所述当前帧是第一当前帧,所述方法还包括通过最小化第二当前帧与第二参考帧之间的均方误差来估计初始平移矢量。39.根据权利要求23所述的方法,其中所述当前帧是第一当前帧,所述方法还包括:利用所述一个或多个处理器确定点是否是地面的;以及利用所述一个或多个处理器,基于所述点是否是地面的来估计第二当前帧的旋转矩阵。40.根据权利要求39所述的方法,还包括利用所述一个或多个处理器用信号发送指示所述点是否是地面的的一组标签。41.根据权利要求23所述的方法,还包括利用所述一个或多个处理器生成所述点云数据。42.根据权利要求41所述的方法,还包括利用所述一个或多个处理器基于来自lidar装置的信号生成所述点云数据。43.一种其上存储有指令的计算机可读存储介质,所述指令在被执行时使一个或多个处理器:从全球定位系统信息中识别第一组全局运动参数;基于所述第一组全局运动参数来确定要用于当前帧的全局运动估计的第二组全局运动参数;以及基于所述第二组全局运动参数来对参考帧应用运动补偿以生成所述当前帧的全局运动补偿帧。
技术总结
一种用于对点云数据进行编码的设备,该设备包括:用于存储点云数据的存储器;以及耦合到存储器并在电路中实现的一个或多个处理器,一个或多个处理器被配置为从全球定位系统信息中识别第一组全局运动参数。一个或多个处理器还被配置为基于第一组全局运动参数来确定要用于当前帧的全局运动估计的第二组全局运动参数,以及基于第二组全局运动参数对参考帧应用运动补偿以生成当前帧的全局运动补偿帧。应用运动补偿以生成当前帧的全局运动补偿帧。应用运动补偿以生成当前帧的全局运动补偿帧。
技术研发人员:K
受保护的技术使用者:高通股份有限公司
技术研发日:2021.10.07
技术公布日:2023/8/29
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。