1.本实用新型涉及码垛机技术领域,具体为一种立柱拐臂码垛机。
背景技术:
2.码垛机是将已装入容器的货物,按一定排列码放在托盘、栈板(木质、塑胶)上,进行自动堆码,可堆码多层,然后推出,便于叉车运至仓库储存。采用plc和触摸屏控制,实现智能化操作管理,简便、易掌握。可大大地减少劳动力和降低劳动强度。码垛机是输送机输送来的料袋、纸箱或是其它包装材料按照客户工艺要求的工作方式自动堆叠成垛,并将成垛的物料进行输送的设备。现有的码垛机,在对货物进行搬运码垛工作时,只能够进行单一的固定形式的货物搬运码垛工作,大多只有上下和左右运动,灵活性较差,使用时局限性大,实用性较低。
技术实现要素:
3.本实用新型要解决的技术问题是克服现有的缺陷,提供一种立柱拐臂码垛机,能够带动货物进行多角度的转动,灵活性较高,适用范围更广泛,可以有效解决背景技术中的问题。
4.为实现上述目的,本实用新型提供如下技术方案:一种立柱拐臂码垛机,包括底座和拐臂码垛机构;
5.底座:其上端通过螺栓连接有固定盘,固定盘的上端设置有立柱,立柱的前端设置有直线电机,直线电机的定子座前端设置有移动板,移动板的前端设置有连接臂,连接臂的前端设置有连接筒一;
6.拐臂码垛机构:其设置于连接筒一的下端;
7.其中:还包括单片机,所述单片机设置于底座的右端,单片机的输入端电连接外部电源,直线电机的输入端电连接单片机的输出端,能够带动货物进行多角度的转动,灵活性较高,适用范围更广泛,实用性更高,易于推广使用。
8.进一步的,所述拐臂码垛机构包括连接筒二、拐臂、连接筒三、连接板、气动手指、连接架、支撑架和码垛钩,所述连接筒二通过轴承一转动连接于连接筒一的下端,连接筒二的外弧面固定连接有拐臂,拐臂远离连接筒二中心的一端设置有连接筒三,连接筒三的下端通过轴承二转动连接有连接板,连接板的下端设置有气动手指,气动手指的下端均设置有连接架,纵向相邻的两个连接架之间均设置有支撑架,竖向相邻的两个支撑架之间均设置有码垛钩,气动手指的进气端与外部气泵相连通,能够对货物进行码垛。
9.进一步的,还包括电机一,所述电机一设置于连接筒一内部的安装孔一内,电机一的输出轴下端与连接筒二的上端固定连接,电机一的输入端电连接单片机的输出端,能够带动连接筒二运转。
10.进一步的,还包括电机二,所述电机二设置于连接筒三内部的安装孔二内,电机二的输出轴下端与连接板的上端固定连接,电机二的输入端电连接单片机的输出端,能够带
动连接板运转。
11.进一步的,所述底座的下端对称设置有固定板,固定板的内部均开设有固定孔,便于对底座进行固定。
12.进一步的,所述立柱的左右两端与固定盘的上端之间均设置有加强撑一,提高了立柱的整体强度。
13.进一步的,所述连接臂的上下两端与移动板的前端之间均设置有加强撑二,提高了连接臂的整体强度。
14.与现有技术相比,本实用新型的有益效果是:本立柱拐臂码垛机,具有以下好处:
15.在使用时,首先通过固定板和固定孔将本码垛机固定至相应位置,向单片机内部输入相应的码垛程序,单片机控制直线电机开始运转,直线电机的动子座带动移动板和连接板上下运动,即可带动码垛钩进行上下运动,通过外部气泵使气动手指开始运转,气动手指带动码垛钩进行运动,从而对货物进行抓取,单片机使电机一开始运转,电机一的输出轴带动连接筒二和拐臂开始旋转,即可带动码垛钩以连接筒二的中心为圆心进行旋转,从而带动货物进行大范围的旋转运动,单片机使电机二开始运转,电机二的输出轴带动连接板进行旋转,即可带动货物以连接筒三的中心为圆心进行旋转,即可带动货物进行自转,对货物的方向进行调整,使码垛钩移动至指定位置后将货物放下,即可完成对货物的码垛工作,使得本立柱拐臂码垛机,能够带动货物进行多角度的转动,灵活性较高,适用范围更广泛,实用性更高,易于推广使用。
附图说明
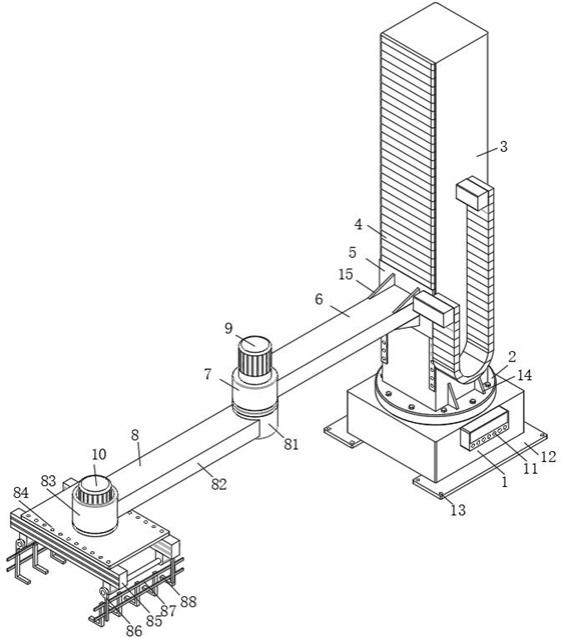
16.图1为本实用新型结构示意图。
17.图中:1底座、2固定盘、3立柱、4直线电机、5移动板、6连接臂、7连接筒一、8拐臂码垛机构、81连接筒二、82拐臂、83连接筒三、84连接板、85气动手指、86连接架、87支撑架、88码垛钩、9电机一、10电机二、11单片机、12固定板、13固定孔、14加强撑一、15加强撑二。
实施方式
18.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
19.请参阅图1,本实施例提供一种技术方案:一种立柱拐臂码垛机,包括底座1和拐臂码垛机构8;
20.底座1:其上端通过螺栓连接有固定盘2,固定盘2的上端设置有立柱3,立柱3的前端设置有直线电机4,直线电机4的定子座前端设置有移动板5,移动板5的前端设置有连接臂6,连接臂6的前端设置有连接筒一7,底座1的下端对称设置有固定板12,固定板12的内部均开设有固定孔13,立柱3的左右两端与固定盘2的上端之间均设置有加强撑一14,连接臂6的上下两端与移动板5的前端之间均设置有加强撑二15;
21.拐臂码垛机构8:其设置于连接筒一7的下端,拐臂码垛机构8包括连接筒二81、拐臂82、连接筒三83、连接板84、气动手指85、连接架86、支撑架87和码垛钩88,连接筒二81通
过轴承一转动连接于连接筒一7的下端,连接筒二81的外弧面固定连接有拐臂82,拐臂82远离连接筒二81中心的一端设置有连接筒三83,连接筒三83的下端通过轴承二转动连接有连接板84,连接板84的下端设置有气动手指85,气动手指85的下端均设置有连接架86,纵向相邻的两个连接架86之间均设置有支撑架87,竖向相邻的两个支撑架87之间均设置有码垛钩88,气动手指85的进气端与外部气泵相连通,还包括电机一9,电机一9设置于连接筒一7内部的安装孔一内,电机一9的输出轴下端与连接筒二81的上端固定连接,电机一9的输入端电连接单片机11的输出端,还包括电机二10,电机二10设置于连接筒三83内部的安装孔二内,电机二10的输出轴下端与连接板84的上端固定连接,电机二10的输入端电连接单片机11的输出端,在使用时,首先通过固定板12和固定孔13将本码垛机固定至相应位置,向单片机11内部输入相应的码垛程序,单片机11控制直线电机4开始运转,直线电机4的动子座带动移动板5和连接板84上下运动,即可带动码垛钩88进行上下运动,通过外部气泵使气动手指85开始运转,气动手指85带动码垛钩88进行运动,从而对货物进行抓取,单片机11使电机一9开始运转,电机一9的输出轴带动连接筒二81和拐臂82开始旋转,即可带动码垛钩88以连接筒二81的中心为圆心进行旋转,从而带动货物进行大范围的旋转运动,单片机11使电机二10开始运转,电机二10的输出轴带动连接板84进行旋转,即可带动货物以连接筒三83的中心为圆心进行旋转,即可带动货物进行自转,对货物的方向进行调整,使码垛钩88移动至指定位置后将货物放下,即可完成对货物的码垛工作,使得本立柱拐臂码垛机,能够带动货物进行多角度的转动,灵活性较高,适用范围更广泛,实用性更高,易于推广使用;
22.其中:还包括单片机11,单片机11设置于底座1的右端,单片机11的输入端电连接外部电源,直线电机4的输入端电连接单片机11的输出端,单片机11控制直线电机4、电机一9和电机二10的正常运转。
23.本实用新型提供的一种立柱拐臂码垛机的工作原理如下:在使用时,首先通过固定板12和固定孔13将本码垛机固定至相应位置,向单片机11内部输入相应的码垛程序,单片机11控制直线电机4开始运转,直线电机4的动子座带动移动板5和连接板84上下运动,即可带动码垛钩88进行上下运动,通过外部气泵使气动手指85开始运转,气动手指85带动码垛钩88进行运动,从而对货物进行抓取,单片机11使电机一9开始运转,电机一9的输出轴带动连接筒二81和拐臂82开始旋转,即可带动码垛钩88以连接筒二81的中心为圆心进行旋转,从而带动货物进行大范围的旋转运动,单片机11使电机二10开始运转,电机二10的输出轴带动连接板84进行旋转,即可带动货物以连接筒三83的中心为圆心进行旋转,即可带动货物进行自转,对货物的方向进行调整,使码垛钩88移动至指定位置后将货物放下,即可完成对货物的码垛工作,使得本立柱拐臂码垛机,能够带动货物进行多角度的转动,灵活性较高,适用范围更广泛,实用性更高,易于推广使用。
24.值得注意的是,以上实施例中所公开的单片机11可选用s7-1200,直线电机4可选用ddl,电机一9和电机二10可选用130sf-m05020,气动手指85可选用hft10
×
20s,单片机11控制直线电机4、电机一9和电机二10工作均采用现有技术中常用的方法。
25.以上所述仅为本实用新型的实施例,并非因此限制本实用新型的专利范围,凡是利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本实用新型的专利保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。