1.本发明涉及一种分析系统、分析方法、分析用数据获取装置以及分析用程序。
背景技术:
2.video head impulse test(以下,也称为“vhit”)是2009年开发的通过旋转刺激进行的半规管功能检查的一种。所述vhit与历来通过温度刺激进行的冷热试验相比,因能够通过生理性的刺激方法进行检查,除了水平半规管还能获知垂直半规管的功能,检查较简便等理由,在全世界得以迅速推广。
3.所述vhit利用使被验者(患者)的头部快速转动时产生的前庭眼球反射(vestibulo ocular reflex,以下也称之为“vor”),测定所述vor中的头位与眼位的角速度。所述vhit的评价项目包括vor
gain
以及所述vor
gain
减小时发生的补偿性扫视(catch up saccade,以下也称之为“cus”)。其中,所述vor
gain
对于半规管功能检查的定量化而言是重要项目。在现行的根据对vor中的头位及眼位的角速度分别进行积分的角度比、或者根据从vor开始之后的任意时间的头位及眼位的角速度比直接计算vor
gain
的方法(以下也称之为“直接法”)中,健康人的所述vor
gain
大致为1,但半规管功能低下的患者的所述vor
gain
降低至大概低于0.8时,将无法盯视目标,从而会发生所述cus。
4.在所述vhit中,由于旋转刺激下进行检查的特性所趋,在旋转动作中有时会发生戴在头部的眼镜错位的滑动伪影以及无法正确测定眼位的噪声伪影。在此情况下,所述直接法会大为受到伪影的影响,而导致无法适当显示所述vor
gain
的问题(例如,参照非专利文献1)。另外,半规管功能低下的患者在旋转刺激时的旋转角速度加快时所述vor
gain
会低下,而当前的所述vhit中存在的问题是并未考虑到旋转角速度的影响。并且,今后随着所述vhit的普及,提高所述vor
gain
的检查精度是不可或缺的。
5.《现有技术文献》
6.《非专利文献》
7.非专利文献1:“video head impulse test与温度刺激检查的相互评价”,新藤晋等,equilibrium res.vol.74(6)541-551 2015)
技术实现要素:
8.《本发明要解决的问题》
9.本发明的目的在于提供一种能够不受滑动等的伪影的影响、飞跃性地提高检查精度、正确且精密地进行半规管功能的分析系统、分析方法、分析用数据获取装置以及分析用程序。
10.《用于解决问题的手段》
11.作为解决所述课题的方法,如下所述。即,
12.《1》一种用于分析旋转刺激下的半规管的功能的分析系统,其特征在于,所述分析系统包括前庭眼球反射数据获取元件,其获取前庭眼球反射旋转角量除以头位旋转角量而
得出的第1前庭眼球反射数据,以及从所述头位旋转角量至少减去基于补偿性扫视(cus)的旋转角量获得剩余旋转角量之后除以所述头位旋转角量而得出的第2前庭眼球反射数据,根据所述第2前庭眼球反射数据,或者所述第1前庭眼球反射数据以及所述第2前庭眼球反射数据,分析半规管的功能。
13.《2》根据所述《1》的分析系统,其中,所述第2前庭眼球反射数据是,根据利用穿戴于被验者头部的、用于获取所述头部转动时的所述头部的旋转角速度数据以及所述被验者的眼睛的动作的旋转角速度数据的旋转角速度数据获取元件所获取的所述头部的旋转角速度数据以及所述眼睛的动作的旋转角速度数据,在将使所述头部转动的期间的所述头部的旋转角速度数据的积分值作为a、并将基于所述被验者的眼睛的补偿性扫视(cus)的旋转角速度数据的积分值作为c的情况下,按照以下公式vor
gain(i)
=(a-c)/a导出的所述vor
gain(i)
的值。
14.《3》根据所述《2》的分析系统,其中,所述第1前庭眼球反射数据是,根据由所述旋转角速度数据获取元件所获取的、所述头部的旋转角速度数据以及所述眼睛的动作的旋转角速度数据,在将使所述头部转动的期间的所述头部的旋转角速度数据的积分值作为a、并将所述眼睛的动作的旋转角速度数据的积分值作为b的情况下,按照以下公式vor
gain(d)
=b/a导出的所述vor
gain(d)
的值。
15.《4》一种用于分析旋转刺激下的半规管的功能的分析系统,其特征在于包括:旋转角速度数据获取元件,穿戴于被验者头部,以获取所述头部转动时的所述头部的旋转角速度数据以及所述被验者的眼睛的动作的旋转角速度数据;分析元件,根据由所述旋转角速度数据获取元件获取的所述头部的旋转角速度数据以及所述眼睛的动作的旋转角速度数据,在将使所述头部转动的期间的所述头部的旋转角速度数据的积分值作为a、并将基于所述被验者的眼睛的补偿性扫视(cus)的旋转角速度数据的积分值作为c的情况下,导出以下公式vor
gain(i)
=(a-c)/a,并根据所述vor
gain(i)
的值分析半规管的功能。
16.《5》根据所述《2》至《4》的任一项所述的分析系统,其中,所述a的数据值是头部的多个旋转角速度数据的多个积分值的合计积分值,所述c的数据值是基于被验者的眼睛的补偿性扫视(cus)的多个旋转角速度数据的多个积分值的合计积分值。
17.《6》根据所述《2》至《5》中的任一项所述的分析系统,其中,获取多个所述vor
gain(i)
的值,根据获取的多个所述vor
gain(i)
的值导出近似线,并根据所述近似线导出规定的旋转角速度时的所述vor
gain(i)
的值。
18.《7》根据所述《2》至《6》中的任一项所述的分析系统,其中,获取多个所述vor
gain(i)
的值,根据获取的多个所述vor
gain(i)
的值导出近似线,并根据所述近似线导出所述获取的多个所述vor
gain(i)
的值的偏差。
19.《8》根据所述《2》至《7》中的任一项所述的分析系统,其中,根据由所述旋转角速度数据获取元件获取的所述头部的旋转角速度数据以及所述眼睛的动作的旋转角速度数据,在将使所述头部转动的期间的所述头部的旋转角速度数据的积分值作为a、并将所述眼睛的动作的旋转角速度数据的积分值作为b的情况下,导出以下公式vor
gain(d)
=b/a,并算出所述vor
gain(d)
的值与所述vor
gain(i)
的值的差的平均以及标准偏差。
20.《9》根据所述《8》所述的分析系统,其中,所述分析系统包括警告元件,其显示所述vor
gain(d)
的值、所述vor
gain(i)
的值、以及所述vor
gain(d)
的值与所述vor
gain(i)
的值的差的平均
以及标准偏差,并在这些值超出基准值的情况下发出警告。
21.《10》根据所述《2》至《9》中的任一项所述的分析系统,其中,所述旋转角速度数据获取元件包括:传感器,收集所述头部的转动所涉及的旋转角速度数据;摄像机,拍摄所述被验者的眼睛的动作。
22.《11》一种用于分析旋转刺激下的半规管的功能的分析用数据获取装置,其特征在于,包括:传感器,收集头部的转动所涉及的旋转角速度数据:摄像机,拍摄被验者的眼睛的动作。
23.《12》一种用于分析旋转刺激下的半规管的功能的分析方法,其特征在于,包括前庭眼球反射数据获取工序,获取前庭眼球反射旋转角量除以头位旋转角量得出的第1前庭眼球反射数据、以及从所述头位旋转角量至少减去基于补偿性扫视(cus)的旋转角量获得剩余旋转角量之后除以所述头位旋转角量而得出的第2前庭眼球反射数据,根据所述第2前庭眼球反射数据,或者所述第1前庭眼球反射数据以及所述第2前庭眼球反射数据,分析半规管的功能。
24.《13》一种用于分析旋转刺激下的半规管的功能的分析方法,其特征在于,包括:旋转角速度数据获取工序,穿戴于被验者头部,获取所述头部转动时的所述头部的旋转角速度数据以及所述被验者的眼睛的动作的旋转角速度数据;分析工序,根据在所述旋转角速度数据获取工序中获取的所述头部的旋转角速度数据以及所述眼睛的动作的旋转角速度数据,在将使所述头部转动的期间的所述头部的旋转角速度的数据的积分值作为a、并将基于所述被验者的眼睛的补偿性扫视(cus)的旋转角速度数据的积分值作为c的情况下,导出以下公式vor
gain(i)
=(a-c)/a,并根据所述vor
gain(i)
的值分析半规管的功能。
25.《14》一种用于分析旋转刺激下的半规管的功能的分析用程序,其特征在于,使计算机进行以下处理:获取前庭眼球反射旋转角量除以头位旋转角量而得出的第1前庭眼球反射数据、以及从所述头位旋转角量至少减去基于补偿性扫视(cus)的旋转角量获得剩余旋转角量之后除以所述头位旋转角量而得出的第2前庭眼球反射数据;根据所述第2前庭眼球反射数据,或者所述第1前庭眼球反射数据以及所述第2前庭眼球反射数据,分析半规管的功能。
26.《15》一种用于分析旋转刺激下的半规管的功能的分析用程序,其特征在于,使计算机进行以下处理:获取被验者的头部转动时的所述头部的旋转角速度数据以及所述被验者的眼睛的动作的旋转角速度数据,根据所述头部的旋转角速度数据以及所述眼睛的动作的旋转角速度数据,在将使所述头部转动的期间的所述头部的旋转角速度数据的积分值作为a、并将基于所述被验者的眼睛的补偿性扫视(cus)的旋转角速度数据的积分值作为c的情况下,导出以下公式vor
gain(i)
=(a-c)/a,并根据所述vor
gain(i)
的值分析半规管的功能。
27.《发明的效果》
28.根据本发明,能够提供一种能够不受滑动等的伪影的影响、飞跃性地提高检查精度、正确且精密地进行半规管功能的分析的分析系统、分析方法、分析用数据获取装置以及分析用程序。
附图说明
29.图1是表示vhit测定中的时间与角速度的关系的图表。
30.图2a是用于说明通过vhit测定直接求出vor
gain
的直接法的,表示时间与角速度的关系的图表。
31.图2b是用于说明通过vhit测定直接求出vor
gain
的直接法的,表示时间与角速度的关系的图表。
32.图3是用于说明通过vhit测定间接求出vor
gain
的间接法的,表示时间与角速度的关系的图表。
33.图4是表示本发明的分析系统的硬件结构的一例的图。
34.图5是表示本发明的分析系统的功能结构的一例的图。
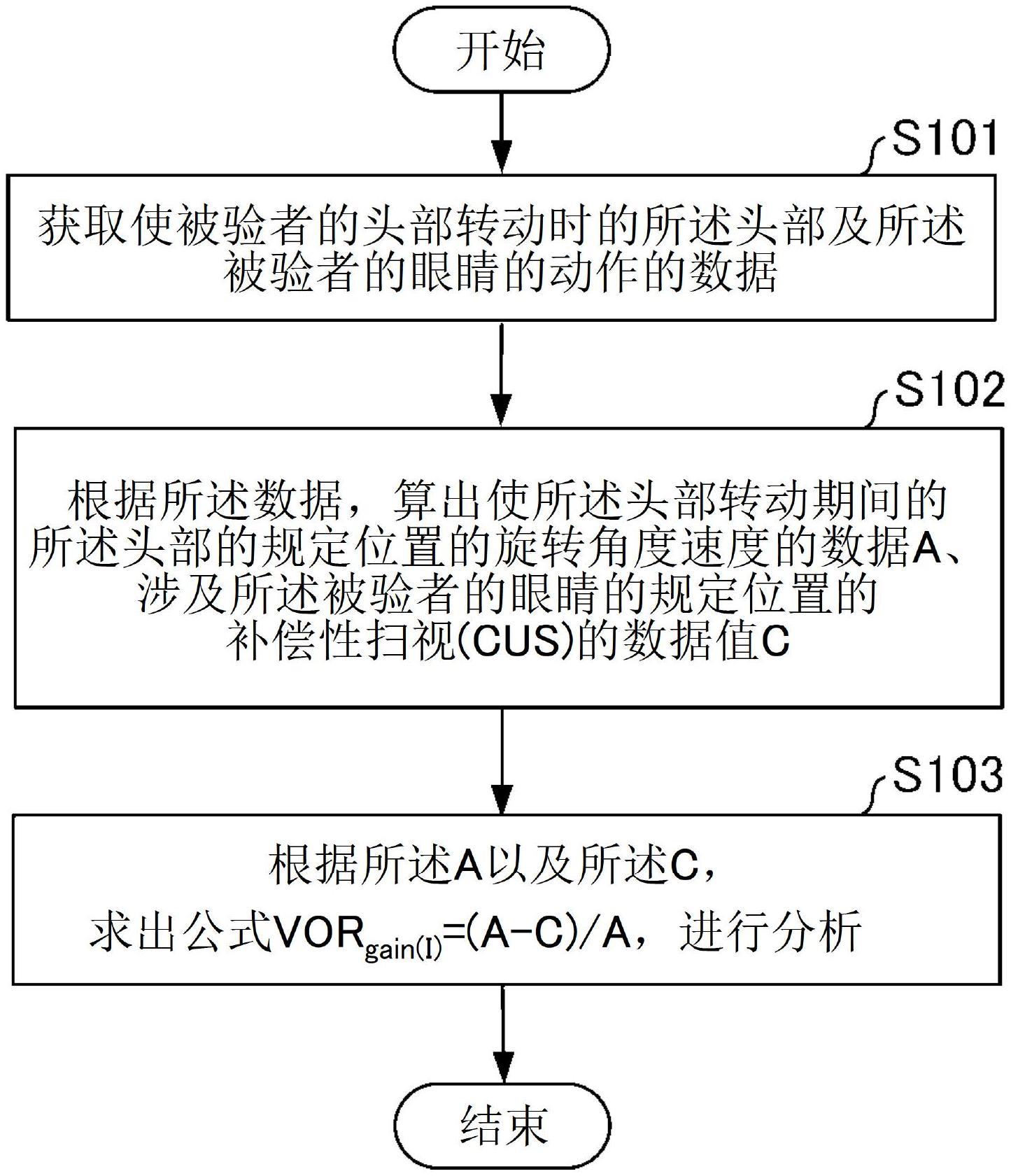
35.图6是表示本发明的分析方法的处理流程的一个例子的流程图。
36.图7是表示实施例1中在无滑动伪影的条件下的测定被验者的时间与角速度的关系的图表。
37.图8是表示实施例1中有意图地使被验者滑动并测定的时间与角速度的关系的图表。
38.图9a是表示实施例2中健康人的旋转角速度与vor
gain
的关系的图表。
39.图9b是表示实施例2中一侧前庭功能低下的患者的旋转角速度与vor
gain
的关系的图表。
40.图10是表示实施例2中旋转角速度致使vor
gain
变化的例子中的旋转角速度与vor
gain
的关系的图表。
41.图11是表示实施例2中作成近似线,以规定的角速度求出vor
gain
的方法的图表。
42.图12a是实施例3中伪影较少的例子,是表示vor
gain
大致不变时的旋转角速度与vor
gain
的关系的图表。
43.图12b是实施例3中伪影较多的例子,是表示vor
gain
有偏差时的旋转角速度与vor
gain
的关系的图表。
44.图13a是表示实施例3中伪影较多但标准偏差较小的旋转角速度与vor
gain
的关系的图表。
45.图13b是表示实施例3中伪影较少且标准偏差较小的例子中的旋转角速度与vor
gain
的关系的图表。
46.图14a是表示以最小二乘法对实施例3中的图13a进行线性拟合的情况下的旋转角速度与vor
gain
的关系的图表。
47.图14b是表示以最小二乘法对实施例3中的图13b进行线性拟合的情况下的旋转角速度与vor
gain
的关系的图表。
具体实施方式
48.(分析系统以及分析方法)
49.本发明的分析系统的第1方式为一种用于分析旋转刺激下的半规管的功能的分析系统,其包括前庭眼球反射数据获取元件,获取前庭眼球反射旋转角量除以头位旋转角量而得出的第1前庭眼球反射数据,以及从所述头位旋转角量至少减去基于补偿性扫视(cus)的旋转角量获得剩余旋转角量之后除以所述头位旋转角量而得出的第2前庭眼球反射数据,根据所述第2前庭眼球反射数据,或者所述第1前庭眼球反射数据以及所述第2前庭眼球
反射数据,分析半规管的功能。
50.本发明的分析系统的第2方式为一种用于分析旋转刺激下的半规管的功能的分析系统,其包括:旋转角速度数据获取元件,穿戴于被验者的头部,以获取所述头部转动时的所述头部的旋转角速度数据以及所述被验者的眼睛的动作的旋转角速度数据;分析元件,根据由所述旋转角速度数据获取元件获取的所述头部的旋转角速度数据以及所述眼睛的动作的旋转角速度数据,在将使所述头部转动的期间的所述头部的旋转角速度数据的积分值作为a、并将基于所述被验者的眼睛的补偿性扫视(cus)的旋转角速度数据的积分值作为c的情况下,导出以下公式vor
gain(i)
=(a-c)/a,并根据所述vor
gain(i)
的值分析半规管的功能,还可以根据需要包括其他部件。
51.本发明的分析方法的第1方式为一种用于分析旋转刺激下的半规管的功能的分析方法,其包括前庭眼球反射数据获取工序,用于获取前庭眼球反射旋转角量除以头位旋转角量而得出的第1前庭眼球反射数据、以及从所述头位旋转角量至少减去基于补偿性扫视(cus)的旋转角量获得剩余旋转角量之后除以所述头位旋转角量而得出的第2前庭眼球反射数据,并根据所述第2前庭眼球反射数据,或者所述第1前庭眼球反射数据以及所述第2前庭眼球反射数据,分析半规管的功能。
52.本发明的分析方法的第2方式为一种用于分析旋转刺激下的半规管的功能的分析方法,其包括:旋转角速度数据获取工序,穿戴于被验者头部,获取所述头部转动时的所述头部的旋转角速度数据以及所述被验者的眼睛的动作的旋转角速度数据;分析工序,根据在所述旋转角速度数据获取工序中获取的所述头部的旋转角速度数据以及所述眼睛的动作的旋转角速度数据,在将使所述头部转动的期间的所述头部的旋转角速度数据的积分值作为a、并将基于所述被验者的眼睛的补偿性扫视(cus)的旋转角速度数据的积分值作为c的情况下,导出以下公式vor
gain(i)
=(a-c)/a,并根据所述vor
gain(i)
的值分析半规管的功能,还可以根据需要包括其他工序。
53.能够由本发明的第1以及第2方式的分析系统适当地实施本发明的第1以及第2方式的分析方法,能够由前庭眼球反射数据获取元件进行前庭眼球反射数据获取工序,能够由旋转角速度数据获取元件进行旋转角速度数据获取工序,能够由分析元件进行分析工序,能够由其他部件进行其他工序。
54.本发明的第1以及第2方式提供的分析系统以及分析方法是用于对旋转刺激下的半规管的功能进行分析的分析系统以及分析方法。
55.关于所述半规管,包括人类在内的脊索动物几乎都有3个半规管,因此也被称为三半规管。所述三半规管是掌控平衡感(旋转加速度)的器官,是连接于内耳前庭且具有半圆形的3个管状的半规管的统称。
56.作为上述在旋转刺激下检查半规管功能的方法,有head impulse test(hit)以及video head impulse test(vhit)。
57.所述hit,首先,使检验者正对着被验者而坐,并指示被验者持续盯视检验者的目标(鼻尖)。其次,检验者双手稳持被验者的侧头部,并以使头部迅速、小幅度旋转的方式进行head impulse(hi)刺激。当健康人受到hi刺激时,依靠前庭眼球反射(vor)的功能,能够持续盯视目标(鼻尖)不放。但是,当半规管功能低下例的疾患侧方向受到hi刺激时,由于vor的功能不健全,无法持续盯视目标,在刺激开始后的大约200msec后会出现补偿性扫视
(cus)。进行hit时左右分别进行3次的hi刺激,通过肉眼确认到2次以上cus的情况,判定为半规管功能低下。
58.所述hit比起利用温度刺激进行的冷热试验,其优点在于对患者的侵袭较小,可在较短时间进行,而且在生理性刺激条件下就能够进行检查。另一方面,所述hit要依靠肉眼进行诊断,会有主观因素在内,从而造成无法对出现了肉眼无从识别的cus的类型的半规管功能低下进行诊断,无法定量性地评价半规管功能的问题。
59.所述vhit是为了改善这种hit中的问题而开发的技术,由于检查中同时对头位及眼位的角速度进行记录,因此需要vhit专用装置。作为所述vhit专用装置,使用将内置有高速摄像机及传感器的专用眼镜配戴于头部的类型的vhit专用装置,可以举出例如natus公司制造的ics impulse、interacoustic公司制造的eye see cam等。
60.《前庭眼球反射数据获取工序以及前庭眼球反射数据获取元件》
61.前庭眼球反射数据获取工序是获取前庭眼球反射旋转角量除以头位旋转角量而得出的第1前庭眼球反射数据、以及从所述头位旋转角量至少减去基于补偿性扫视(cus)的旋转角量获得剩余旋转角量之后除以所述头位旋转角量而得出的第2前庭眼球反射数据的工序,由前庭眼球反射数据获取元件实施。
62.在本发明的第1方式的分析系统以及分析方法中,根据所述第2前庭眼球反射数据,或者所述第1前庭眼球反射数据以及所述第2前庭眼球反射数据,分析半规管的功能。
63.所述第2前庭眼球反射数据是从所述头位旋转角量至少减去基于补偿性扫视(cus)的旋转角量获得剩余旋转角量之后除以所述头位旋转角量而得出的数据,例如可以举出从vor时的头位的旋转角速度减去cus的旋转角速度的数据等。即,第2前庭眼球反射数据是通过间接法获取的数据。
64.具体而言,所述第2前庭眼球反射数据优选是,根据由穿戴于被验者头部的、用于获取所述头部转动时的所述头部的旋转角速度数据以及所述被验者的眼睛的动作的旋转角速度数据的旋转角速度数据获取元件所获取的所述头部的旋转角速度数据以及所述眼睛的动作的旋转角速度数据,在将使所述头部转动的期间的所述头部的旋转角速度数据的积分值作为a、并将基于所述被验者的眼睛的补偿性扫视(cus)的旋转角速度数据的积分值作为c的情况下,通过以下公式vor
gain(i)
=(a-c)/a导出的所述vor
gain(i)
的值。
65.所述第1前庭眼球反射数据是前庭眼球反射旋转角量除以头位旋转角量的数据,例如可以举出将vor中的头位与眼位的角速度分别进行积分的角度之比、或者vor开始后的任意时间的头位与眼位的角速度比等。即,第1前庭眼球反射数据是通过直接法获取的数据。
66.具体而言,所述第1前庭眼球反射数据优选是,根据由所述旋转角速度数据获取元件所获取的所述头部的旋转角速度数据以及所述眼睛的动作的旋转角速度数据,在将使所述头部转动的期间的所述头部的旋转角速度数据的积分值作为a、并将所述眼睛的动作的旋转角速度数据的积分值作为b的情况下,通过以下公式vor
gain(d)
=b/a导出的所述vor
gain(d)
的值。
67.《旋转角速度数据获取工序以及旋转角速度数据获取元件》
68.所述数据获取工序是获取所述头部转动时的所述头部的旋转角速度数据以及所述被验者的眼睛的动作的旋转角速度数据的工序,由穿戴于被验者的头部的数据获取元件
实施。
69.所述旋转角速度数据获取元件包括用于收集与所述头部的转动相关的角速度数据的传感器、以及用于拍摄所述被验者的眼睛的动作的摄像机,还可以根据需要包括其他部件。
70.所述传感器检测所述头部转动时的所述头部的动作(角速度),例如可以举出加速度传感器、陀螺仪传感器、运动传感器(由陀螺仪传感器、加速度传感器及磁气传感器构成)等。若使用所述运动传感器,能够测量被验者的头部进行动作时的方向、方位以及速度。
71.所述摄像机检测所述头部转动时的所述被验者的眼睛的动作,例如可以举出红外线ccd摄像机等。所述红外线ccd摄像机被设置在眼镜的右眼侧,通过实时拍摄被验者的瞳孔图像来进行测量。1秒钟最多可拍取250帧图像,检测眼球运动。
72.所述传感器以及所述摄像机被设置在可穿戴于被验者的头部的眼镜上。
73.所述眼镜为轻量型,设有面垫,能够将眼镜着实地配戴于在头部。
74.作为所述其他部件,可以举出激光模组等。
75.所述激光模组被设置在眼镜上,能够在水平3方向(左、中央、右)上照射激光,投射到墙壁或和屏幕上,以用为开始测定前的校正以及测定中的盯视目标。
76.《分析工序以及分析元件》
77.所述分析工序是,根据在所述旋转角速度数据获取工序中获取的所述头部的旋转角速度数据以及所述眼睛的动作的旋转角速度数据,在将使所述头部转动的期间的所述头部的旋转角速度的数据的积分值作为a、并将基于所述被验者的眼睛的补偿性扫视(cus)的旋转角速度数据的积分值作为c的情况下,导出以下公式vor
gain(i)
=(a-c)/a,并根据所述vor
gain(i)
的值对半规管的功能进行分析的工序,由分析元件实施。
78.所述a的数据值为积分值,所述c的数据值为多个积分值的合计积分值。
79.作为所述数据分析元件,具体是安装有分析用程序的笔记本式计算机。
80.在本发明中,并不采用将vor时的头位以及眼位的角速度直接利用于计算的直接法,即,在将使头部转动期间的所述头部的规定位置的旋转角速度的数据值作为a、并将所述被验者的眼睛的规定位置的旋转角速度的数据值作为b的情况下,通过以下公式vor
gain(d)
=b/a算出vor
gain(d)
的直接法,而是采用从vor时的头位的旋转角速度减去cus的旋转角速度的间接法,即,在将使头部转动期间的所述头部的规定位置的旋转角速度的数据值作为a、并将所述被验者的眼睛的规定位置相关的补偿性扫视(cus)的数据值作为c的情况下,通过以下公式vor
gain(i)
=(a-c)/a算出vor
gain(i)
的间接法。
81.所述a的数据值为积分值,所述c的数据值为多个积分值的合计积分值。
82.通过所述间接法,能够获得不受滑动等的伪影的影响的vor
gain(i)
,因此可飞跃性地提高检查精度。
83.在此,关于所述vhit中的vor
gain
的测定方法,以下参照附图进行说明。
84.作为vhit专用装置,使用将内置有高速摄像机及传感器的专用眼镜配戴在头部的类型的vhit专用装置(natus公司制造的ics impulse),进行了测定。
85.所述vhit,首先,让被验者坐在距离墙壁大约1m~1.5m的椅子上,并将目标设置在可正视墙壁的高度。被验者戴上vhit用的眼镜。其次,设定感兴趣区域(roi)。在被验者正视目标的状态下,调节感兴趣区域的位置以使其位于瞳孔的中心。接下来,进行水平方向的校
准。检验者站在被验者的背后,用双手稳固地握住其头部或颚部。然后,指示被验者盯视所述目标,在水平方向上使被验者的头部快速旋转大约10度,并停顿于该处不返回。旋转刺激次数根据机型而异,对此并无特别限定,但通常为20次。
86.如上所述,通过使用vhit专用装置测定vhit,可获得如图1所示的表示时间与角速度之间的关系的图表。图1中,20次的数据相重叠,示出其中1次的head impulse(hi)刺激结果,以粗线标出头位与眼位。在眼位出现了补偿性扫视(cus)的2个峰值。
87.图1中,真的hi开始点(t=0)是1次的hi刺激的开始点,hi开始点(t’=0)是1次的hi刺激的算法上的开始点。hi结束是1次的hi刺激的结束点。因此,从hi开始点(t’=0)至hi结束点为止,被作为1次的hi刺激下使头部转动的期间。
88.此外,由所述vhit专用装置进行的数据分析中,因计算法的理由,虽说不是以真的hi开始点(t=0)作为基准,而是以hi开始点(t’=0)作为基准求出旋转角速度,但是倘若以真的hi开始点(t=0)作为基准求出旋转角速度,也会获得同样的结果。
89.接下来,关于通过直接法求出vor
gain(d)
的方式进行说明。
90.如图2a以及图2b所示,根据由vhit专用装置的旋转角速度数据获取元件所获取的头部转动时的所述头部以及被验者的眼睛的动作的数据,在将使所述头部转动的期间的所述头部的规定位置的旋转角速度的数据值作为a、并将所述被验者的眼睛的规定位置的旋转角速度的数据值作为b的情况下,导出以下公式vor
gain(d)
=b/a。
91.在此,1次的hi刺激中的vor的头位的旋转角速度的算出,由于旋转角速度的积分为旋转角度,因此,图2a的粗线围成的范围a,即,由旋转角速度为0的直线(下边)、hi开始点(t’=0)的直线(左边)、头位的vor(上面)及hi结束时点(右边)围成的范围成为头位的旋转角度。
92.另一方面,1次的hi刺激中的vor的眼位的旋转角速度b的算出,由于旋转角速度的积分为旋转角度,因此,图2b的粗线围成的范围b,即,由旋转角速度为0的直线(下边)、hi开始点(t’=0)的直线(左边)、眼位的vor(上面)及hi结束时点(右边)围成的范围成为眼位的旋转角度。并且,眼位由规定以上的角速度变化时,通过算法被判定为cus(=c)。cus并非是基于vor的眼位变化,因此,减去在vor结束前出现的cus,算出眼位的旋转角度。由分析用程序自动进行该减去cus的计算处理。
93.根据以上述方式求出的旋转角度a以及b,导出以下公式vor
gain(d)
=b/a,并将测定20次的平均值作为直接法的vor
gain(d)
。以下,也称为直接法(角度比)。
94.另外,还可以根据从vor开始点之后的任意时间(例如,60msec、100msec)的眼位及头位的角速度之比,直接求出vor
gain(d)
。以下,也称为“直接法(角速度比@60ms)、直接法(角速度比@100ms)。
95.接下来,关于通过间接法求出vor
gain(i)
的方式进行说明。
96.作为间接法的思路,可够建立如下假说,只要持续盯视目标,无论有无半规管功能的低下,经过一定时间后头位与眼位的旋转角度(旋转角速度的积分值)会成为相等。
97.上述假说正确的情况下,如图3所示,根据由vhit专用装置的数据获取元件所获取的头部转动时的所述头部以及所述被验者的眼睛的动作的数据,在将使所述头部转动的期间的所述头部的规定位置的旋转角速度的数据值作为a、将所述被验者的眼睛的规定位置相关的补偿性扫视(cus)的数据值作为c时,旋转角度a=b c的关系成立,因此根据b=a-c,
能够导出以下公式vor
gain(i)
=(a-c)/a。
98.优选为所述a的数据值是积分值,所述c的数据值是多个积分值的合计积分值。
99.所述a的数据值是head impulse(hi)刺激下的头位的旋转角度(旋转角速度的积分值)。
100.所述c的数据值是多个cus的面积(旋转角速度的积分值)。补偿性扫视(cus)会在vor结束前、vor结束后出现多个,因此,将cus的总面积作为c。
101.因此,并非是使用1次的hi刺激中的眼位的积分值b,而是谋求到了从头位的积分值减去cus的合计积分值来算出vor的方法(间接法)。并且,补偿性扫视(cus)会在vor结束前以及vor结束后出现多个,因此,将cus的总面积作为c。
102.所述分析元件获取多个所述vor
gain(i)
的值,根据获取的多个所述vor
gain(i)
的值导出近似线,并根据所述近似线导出规定的旋转角速度时的所述vor
gain(i)
的值。在此,近似线包括近似直线或近似曲线。
103.旋转刺激检查中的旋转角速度优选为100
°
/sec~200
°
/sec。因此,例如,能够从近似线求出旋转角速度150
°
/sec时的vor
gain
,获得不受旋转角速度影响的vor
gain(i)
,以实现vor
gain
值的标准化。
104.作为所述近似线的导出方法,能够采用各种总计分析手法,例如可以举出最小二乘法等。
105.所述分析元件获取多个所述vor
gain(i)
的值,根据获取的多个所述vor
gain(i)
的值导出近似线,并根据所述近似线导出获取的所述多个vor
gain(i)
的值的偏差。由此,能够提高检查精度。
106.通过进行多次vhit检查,可获得旋转角速度与vor
gain
的散布图。通过根据该散布图制作近似线,算出规定的旋转角速度时的vor
gain
。
107.作为所述近似线的导出方法,能够采用各种总计分析手法,例如可以举出最小二乘法等。
108.作为所述偏差,例如可以举出标准偏差、标准误差、分散、变异系数(cv)等。
109.所述分析元件通过求出采用所述直接法求出的vor
gain(d)
与采用所述间接法求出的vor
gain(i)
之差的标准偏差,并进行分析,能够掌握伪影的程度,从而能够评价是否在适当的条件下进行了检查。
110.此外,还可以根据对多个被验者采用所述直接法求出的vor
gain(d)
与采用所述间接法求出的vor
gain(i)
,绘制成散布图,求出相关系数,对患者数据进行精密分析。
111.《其他工序以及其他部件》
112.作为所述其他工序,并无特别限定,可根据目的适当选择,例如可以举出通信工序、输入工序等。
113.作为所述其他部件,并无特别限定,可根据目的适当选择,例如可以举出通信部、输入部等。
114.作为所述通信部,只要是能够与多个检查部位等进行通信的结构即可,对此并无特别限定,可适当使用公知的技术结构,例如可以举出信号收发机、信息通信网络、互联网等。
115.作为所述输入部,只要是能够接受对本发明的第1以及第2分析系统发出的各种要
求即可,对此并无特别限定,可适当使用公知的技术结构,例如可以举出键盘、鼠标、触摸板、传声器等。
116.(分析用数据获取装置)
117.本发明的分析用数据获取装置用于对旋转刺激下的半规管的功能进行分析,包括用于收集与头部转动相关的角速度数据的传感器以及用于拍摄被验者的眼睛的动作的摄像机,还可以根据需要配备其他部件。
118.作为所述分析用数据获取装置,并无特别限定,可根据目的适当选择,但优选眼镜式的分析用数据获取装置。
119.所述眼镜式的分析用数据获取装置包括1秒钟最多可进行250张高速拍摄的高速摄像机、以及用于获得头位信息的传感器。
120.作为所述其他部件,例如可以举出分析用软件、计算机等。
121.根据所述分析用数据获取装置,由于其容易搬运,因此能够在床边或门诊也简便地实施检查。
122.(分析用程序)
123.本发明的分析用程序的第1方式为一种用于对旋转刺激下的半规管的功能进行分析的分析用程序,其使计算机进行以下处理,即,获取前庭眼球反射旋转角量除以头位旋转角量而得出的第1前庭眼球反射数据、以及从所述头位旋转角量至少减去基于补偿性扫视(cus)的旋转角量获得剩余旋转角量之后除以所述头位旋转角量而得出的第2前庭眼球反射数据,并根据所述第2前庭眼球反射数据,或者所述第1前庭眼球反射数据以及所述第2前庭眼球反射数据,分析半规管的功能的处理。
124.本发明的分析用程序的第2方式为一种用于对旋转刺激下的半规管的功能进行分析的分析用程序,其使计算机进行以下处理,即,获取被验者的头部转动时的所述头部的旋转角速度数据以及所述被验者的眼睛的动作的旋转角速度数据,根据所述头部的旋转角速度数据以及所述眼睛的动作的旋转角速度数据,在将使所述头部转动的期间的所述头部的旋转角速度数据的积分值作为a、并将基于所述被验者的眼睛的补偿性扫视(cus)的旋转角速度数据的积分值作为c的情况下,导出以下公式vor
gain(i)
=(a-c)/a,并根据所述vor
gain(i)
的值分析半规管的功能的处理。
125.本发明的第1以及第2方式的分析用程序,例如可以是用于使计算机执行本发明的第1以及第2方式的分析方法的程序。此外,本发明的第1以及第2方式的分析用程序中的适当方式,例如可以与本发明的第1以及第2方式的分析方法中的适当方式相同。
126.本发明的第1以及第2方式的分析用程序,可根据所使用的计算机系统的结构以及操作系统的种类、版本等,使用各种程序语言写成。
127.本发明的第1以及第2方式的分析用程序,可以被记录在内置型硬盘、外设型硬盘等记录介质中,也可以被记录在cd-rom、dvd-rom、mo盘、usb存储器等的记录介质中。
128.进而,在本发明的第1以及第2方式的分析用程序被记录在上述记录介质的情况下,可根据需要,通过计算机系统所具备的记录介质读取装置直接、或者安装到硬盘中后使用这些程序。此外,还可以将本发明的第1以及第2方式的分析用程序记录在可由计算机系统通过信息通信网络进行访问的外部存储区域(其他计算机等)。在此情况下,可根据需要,通过信息通信网络从外部存储区域直接、或者安装到硬盘中之后,使用这些被记录在外部
存区域的本发明的第1以及第2方式的分析用程序。
129.此外,还可以将本发明的第1以及第2方式的分析用程序记录在多个记录介质中,按每个任意的处理分割记录。
130.《计算机可读取的记录介质》
131.与本发明相关的计算机可读取的记录介质,通过记录本发明的分析用程序而形成。
132.作为与本发明相关的计算机可读取的记录介质,并无特别限定,可根据目的适当选择,例如可以举出内置型硬盘、外设型硬盘、cd-rom、dvd-rom、mo盘、usb存储器等。
133.另外,与本发明相关的计算机可读取的记录介质,也可以是将本发明的分析用程序按照每个任意的处理进行分割记录的多个记录介质。
134.以下,利用装置的结构例以及流程图等,对本发明所公开的技术的一例进行更为详细的说明。
135.图4示出本发明的分析系统的硬件结构例。
136.在该图4所示的本发明的分析系统100中,例如,控制部101、主存储装置102、辅助存储装置103、i/o界面104、通信界面105、输入装置106、输出装置107、显示装置108通过系统总线109连接。
137.控制部101进行运算(四则运算、比较运算等)、硬件以及软件的动作控制等。作为控制部101,例如可以是cpu(central processing unit),也可以是本发明的分析系统中使用的设备的一部分,还可以是这些的组合。
138.控制部101,例如通过执行主存储装置102等读取的程序(例如,本发明的分析用程序等),实现各种功能。
139.本发明的分析系统中由控制功能部进行的处理,例如能够由控制部101进行。
140.主存储装置102存储各种程序的同时,存储用于执行各种程序时所需的数据等。作为主存储装置102,例如能够使用具有rom(read only memory)以及ram(random access memory)的至少任一个的结构。
141.rom例如存储bios(basic input/output system)等的各种程序等。另外,作为rom并无特别限定,可根据目的适当选择,例如可以举出掩模rom、prom(programmable rom)等。
142.ram,例如在由控制部101执行rom、辅助存储装置103等中存储的各种程序时,作为展开这些程序的作业范围发挥功能。作为ram,并无特别限定,可根据目的适当选择,例如可以举出dram(dynamic random access memory)、sram(static random access memory)等。
143.作为辅助存储装置103,只要能够存储各种信息即可,对此并无特别限定,可根据目的适当选择,例如可以举出固态驱动器(ssd)、硬盘驱动器(hdd)等。另外,辅助存储装置103还可以是cd驱动器、dvd驱动器、bd(blu-ray(注册商标)盘)驱动器等的可移动存储装置。
144.另外,本发明的分析用程序例如被存放在辅助存储装置103,被下载到主存储装置102的ram(主存储器),由控制部101执行。
145.i/o界面104是用于与各种外部装置进行连接的界面。i/o界面104例如能够进行cd-rom(compact disc rom)、dvd-rom(digital versatile disk rom)、mo盘(magneto-optical disk)、usb存储器〔usb(universal serial bus)flash drive〕等的数据的输入输
出。
146.作为通信界面105,并无特别限定,可适当使用公知的技术,例如可以举出利用无线或有线方式的通信装置等。
147.作为输入装置106,只要能够接受对本发明的分析系统100进行的各种要求或信息的输入,对此并无特别限定,可适当使用公知的技术,例如可以举出键盘、鼠标、触摸板、传声器等。另外,在输入装置106是触摸板(触控显示器)的情况下,输入装置106可兼作显示装置108。
148.作为输出装置107,并无特别限定,可适当使用公知的技术,例如可以举出打印机等。
149.作为显示装置108,并无特别限定,可适当使用公知的技术,例如可以举出液晶显示器、有机el显示器等。
150.图5示出本发明的分析系统的功能结构例。
151.如图5所示,本发明的分析系统100包括通信功能部120、输入功能部130、输出功能部140、显示功能部150、存储功能部160以及控制功能部170。
152.通信功能部120例如与外部的装置进行各种数据的发送接收。通信功能部120例如可以从外部的装置接收被验者的头部以及眼睛的动作的数据等的数据。
153.输入功能部130例如接受对本发明的分析系统100的各种指示。另外,输入功能部130例如接受被验者的属性等的信息。
154.输出功能部140例如打印出直接法与间接法的vor
gain
、标准偏差等的测定结果等。
155.显示功能部150例如在显示器上显示直接法与间接法的vor
gain
、标准偏差等的测定结果。
156.存储功能部160例如存储各种程序的同时,还具有测定数据用db161与算出结果用db162。
157.控制功能部170包括数据获取部171与数据分析部172。控制功能部170例如执行存储功能部160中存储的各种程序的同时,控制本发明的分析系统100整体的动作。
158.数据获取部171例如进行获取被验者的头部转动时的所述头部以及所述被验者的眼睛的动作的数据的处理。
159.数据分析部172例如根据所述数据,在使所述头部转动的期间的所述头部的规定位置的旋转角度的数据值作为a、并将所述被验者的眼睛的规定位置相关的补偿性扫视(cus)的数据值作为c的前提下,对以下公式vor
gain(i)
=(a-c)/a进行分析处理。
160.在此,图6是示出本发明的分析方法中的处理流程的一例的流程图。以下,参照图5,关于本发明的分析方法的处理流程进行说明。
161.在步骤s101,分析系统100的控制功能部170中的数据获取部171获取被验者的头部转动时的所述头部以及所述被验者的眼睛的动作的数据之后,处理推进至s102。
162.在步骤s102,分析系统100的控制功能部170中的数据分析部172,根据所述数据,算出使所述头部转动的期间的所述头部的规定位置的旋转角度的数据值a、及所述被验者的眼睛的规定位置相关的补偿性扫视(cus)的数据值c之后,处理推进至s103。
163.在步骤s103,分析系统100的控制功能部170中的数据分析部172,基于所述数据值a以及c,求出以下公式vor
gain(i)
=(a-c)/a之后,结束本处理。
164.根据采用本发明的分析用程序的本发明的分析方法以及分析系统,能够不受滑动等的伪影的影响,提高检查精度,正确且精密地进行半规管功能的分析。
165.[实施例]
[0166]
以下就本发明的实施例进行说明,但本发明并不受这些实施例的任何限定。
[0167]
在以下的实施例中,回归直线的定义式中的《峰值角速度与vor
gain
的散布图上的回归直线的公式》、《各项目以及各计算公式的定义》以及《标准偏差与标准误差》的意思如下。
[0168]
《峰值角速度与vor
gain
的散布图上的回归直线的公式》
[0169]
按每个峰值角速度而定的增益的基于样本回归分析的回归直线的公式,x轴作为峰值加速度,y轴作为增益,相关系数被定义为
[0170]
在此,sxx、syy、sxy、分别是峰值角速度的分散、增益的分散、峰值角速度与增益的共分散、峰值角速度的平均、增益的平均。
[0171]
该直线的公式y=ax b的系数a与b以及相关系数γ由以下公式定义。
[0172]
《各项目以及各计算公式的定义》
[0173]
xi第i个样本的峰值角速度
[0174]
yi第i个样本的增益
[0175]
n样本数
[0176]
涉及全样本的峰值角速度的平均
[0177][0178]
涉及全样本的增益的平均
[0179][0180]sxx
与x成分相关的分散
[0181][0182]
在此,对全样本算出xk的平均之后,若对各个xk计算并计算分散的话,会造成重复的麻烦,因此,在软件安装中使公式(3)变形而根据公式(4)进行计算,实际上可一并算出平均与分散。以下,在同样的各定义公式中,第二行的公式被用于实际的计算。
[0183]syy
与y成分相关的分散
[0184][0185]sxy
与x成分及y成分相关的共分散
[0186][0187]
a与b回归直线的系数(倾斜a与y切片b,回归系数)
[0188][0189][0190]
γ相关系数
[0191][0192]
γ2决定系数
[0193]
《标准偏差与标准误差》
[0194]
σ
x
峰值角速度的标准偏差(无偏分散的平方根)
[0195]
无偏分散是指与母体的分散的无偏估计量。
[0196][0197]
σy增益的标准偏差(无偏分散的平方根)
[0198][0199]
ser回归分析的标准误差(standard error regression)/残差标准误差
[0200][0201]
se
rc
将回归直线的残差(ei)的平方与算数平均置换为从回归直线的距离(e
′i)的项目进行计算的校正公式。
[0202][0203]
(实施例1)
[0204]
在直接法与间接法中,以一侧半规管功能低下的患者为对象,关于有无滑动伪影对vor
gain
值的影响进行了确认。
[0205]
作为vhit专用装置,使用将内置有已安装本发明的分析用程序的高速摄像机以及传感器的专用眼镜配戴于头部的类型的vhit专用装置(natus公司制造的ics impulse),通过直接法(角度比)、直接法(角速度比@60ms)以及间接法测定了vor
gain
。在此,直接法(角速度比@60ms)的vor
gain
值是根据从vor开始点经过60msec时的眼位与头位的角速度之比直接求出的值。另外,安装有本发明的分析用程序的natus公司制造的ics impulse能够用于通过直接法与间接法求出vor
gain
。
[0206]
如图7所示,在无滑动伪影的条件下,直接法(角度比)的vor
gain
为0.49,直接法(角速度比@60ms)的vor
gain
为0.50,间接法的vor
gain
为0.49,直接法与间接法之间未显差距。
[0207]
另一方面,针对与图7相同的一侧半规管功能低下的患者,刻意制造出滑动伪影,并与上述同样,通过直接法与间接法分别测定了vor
gain
。具体而言,若在检验者的手触碰眼镜的状态下进行头脉冲刺激,刺激会被传递到眼镜,因此造成滑动伪影增大。即,若要着实地进行无滑动伪影的检查,就有必要握持尽量远离眼镜的部分进行检查。而这次为了制造出滑动伪影,检验者在握持被验者的头部时,刻意一并握住眼镜带进行了检查。其结果如图8所示。
[0208]
从图8的结果可看出,直接法(角度比)的vor
gain
为0.71,直接法(角速度比@60ms)的vor
gain
为0.97,间接法的vor
gain
为0.51。
[0209]
由于滑动伪影,直接法(角度比)中,vor
gain
从0.49至0.71上升了0.22,直接法(角
速度比@60ms)中,vor
gain
从0.50至0.97上升了0.47,相对而言,间接法在滑动伪影下其vor
gain
从0.49至0.51,仅上升了0.02。
[0210]
根据以上结果可知,间接法相较于直接法而言,并不会受到滑动伪影的影响。由此可见,通过间接法能够进行正确的半规管功能检查,相较于间接法而言,可飞跃性地提高检查精度。
[0211]
(实施例2)
[0212]
以半规管功能正常的健康人以及半规管功能低下的患者为对象,确认了旋转刺激时的旋转角速度与vor
gain
值的关系。
[0213]
与实施例1同样,使用安装有本发明的分析用程序的natus公司制造的ics impulse,通过间接法求出旋转刺激时的旋转角速度与vor
gain(i)
的值的关系。
[0214]
如图9a所示,半规管功能正常的健康人即使旋转角速度有变化,其变化也较小,在旋转角速度100
°
/sec~200
°
/sec的范围内,vor
gain(i)
的值为大约1.0,保持稳定。
[0215]
另一方面,如图9b所示,一侧前庭功能低下的患者,旋转刺激时的旋转角速度越快vor
gain(i)
的值就越低,旋转角速度100
°
/sec时vor
gain(i)
的值为0.9,旋转角速度200
°
/sec时vor
gain(i)
的值会降低至0.4。如上所述,对一侧前庭功能低下的患者,能够根据旋转刺激时的旋转角速度,有意图地使vor
gain(i)
的值发生变化,因此可能无法正确检查。
[0216]
另外,图10示出左侧前庭功能低下的患者的vor
gain
随着旋转刺激时的旋转角速度的变化而变化的例子。
[0217]
图10的下侧图的左侧的眼睛,在受到90
°
/sec的低速旋转角速度的旋转刺激的情况下,vor
gain
为0.67,而在受到175
°
/sec的高速旋转角速度的旋转刺激的情况下,vor
gain
为0.32,可见旋转角速度的差增大至0.35。在此,图10中的
×
表示平均值。
[0218]
对此,获取多个如图11所示的vor
gain(i)
的值(不同旋转角速度的8个以上),并根据所获取的所述vor
gain(i)
的值,通过最小二乘法导出近似线,并根据所述近似线求出规定的旋转角速度时的所述vor
gain(i)
的值。例如,图11中旋转角速度为150
°
/sec时的vor
gain
为0.40。在此,近似线包含近似直线或者近似曲线。
[0219]
由此,例如能够从近似线求出旋转角速度150
°
/sec时的vor
gain
,获得旋转角速度的影响较小的vor
gain(i)
,以实现vor
gain
值的标准化。
[0220]
另外,通过上述公式(10)、公式(12)以及公式(14),能够求出基于上述最小二乘法的近似线。
[0221]
(实施例3)
[0222]
在安装有本发明的分析用程序的natus公司制造的ics impulse中,作为评价检查精度的项目采用了vor
gain
的左右各进行20次旋转刺激并测定的标准偏差(σ)。在此,标准偏差(σ)是通过上述公式(16)求出的值。
[0223]
图12a示出噪声伪影较少的例子,vor
gain
基本保持稳定,标准偏差(σ)为0.02。另一方面,图12b是噪声伪影较多的例子,vor
gain
分布不均,标准偏差(σ)为0.24。
[0224]
如图12a以及图12b所示,能够根据左右各进行20次旋转刺激并测定的标准偏差(σ),评价检查精度。
[0225]
但是,如图13a所示,即使噪声伪影较多,标准偏差(σ)有时是较小的0.08,如图13b所示,即使噪声伪影较少,标准偏差(σ)有时是较大的0.10。为此,存在仅依靠vor
gain
的标准
偏差(σ)无法正确评价检查精度的问题。
[0226]
对此,如图14a以及图14b所示,采用最小二乘法对图13a以及图13b的结果进行线性拟合求出近似线,通过基于近似线计算精度,如表1所示,能够提高检查精度。在此,近似线包含近似直线或近似曲线。
[0227]
并且,通过上述公式(10)、公式(12)以及公式(14),能够求出采用上述最小二乘法进行线性拟合的近似线。另外,通过上述公式(19)以及公式(20),进行了与图14b的散布图中表示偏差的箭头朝向相应的计算。
[0228]
[表1]
[0229][0230]
(实施例4)
[0231]
关于无滑动伪影的患者a、有滑动伪影的患者b以及每次以一定比率发生滑动伪影的患者c,按照与实施例1同样的方式,使用安装有本发明的分析用程序的natus公司制造的ics impulse进行检查,并分别采用直接法(角度比)、直接法(角速度比@60ms)以及间接法求出vor
gain
,算出两者的差,求出了直接法(角度比)与间接法的差的绝对值、直接法(角速度比@60ms)与间接法的差的绝对值的平均以及标准偏差(σ)。患者a的结果(检查次数为10次)如表2所示,患者b的结果(检查次数为8次)如表3所示,患者c的结果(检查次数为10次)如表4所示。在此,标准偏差(σ)是通过上述公式(16)求出的值。
[0232]
[表2]
[0233][0234]
[表3]
[0235][0236]
[表4]
[0237][0238]
从表2的结果可知,无滑动伪影的患者a,其直接法(角度比)、间接法、直接法(角度比)与间接法的差的绝对值均有较小的标准偏差,直接法(角度比)与间接法的差的平均也较小。
[0239]
从表3的结果可知,有滑动伪影的患者b,其直接法(角度比)、直接法(角度比)与间接法的差的绝对值均有较大的标准偏差,而间接法的标准偏差较小。另外,直接法(角度比)与间接法的差的平均较大。
[0240]
从表4的结果可知,每次以一定比率发生滑动伪影的患者c,其直接法(角度比)、间接法、直接法(角度比)与间接法的差的绝对值均有较小的标准偏差,但直接法(角度比)与间接法的差的平均较大。
[0241]
由此可知,通过并用直接法与间接法,求出两者的差的绝对值的平均以及标准偏差,能够对应各种程度的伪影,恰当地评价检查精度,从而,与历来的技术相比较,可飞跃性地提高检查精度。
[0242]
(实施例5)
[0243]
关于病例1~病例3的患者,与实施例1同样,使用安装有本发明的分析用程序的natus公司制造的ics impulse,通过直接法(角度比)、直接法(角速度比@60ms)及间接法求出vor
gain
,算出两者的差,分别求出直接法(角度比)与间接法的差的绝对值、直接法(角速度比@60ms)与间接法的差的绝对值的平均及标准偏差(σ)。结果如下所示。
[0244]
《病例1》
[0245]
[表5]
[0246][0247]
《病例2》
[0248]
[表6]
[0249][0250]
《病例3》
[0251]
[表7]
[0252][0253]
从病例1~3的结果可知,直接法(角速度比@60ms)在无滑动伪影时其标准偏差也较大,数据容易出现不均。因此可知,直接法(角速度比@60ms)相较于直接法(角度比)而言是缺乏稳定性的参数。
[0254]
从病例1以及2的结果可知,有滑动伪影时,直接法的vor
gain
(角度比、角速度比@60ms)的标准偏差均容易增大。作为例外,病例3的滑动量保持稳定,因此标准偏差较小。
[0255]
根据病例1~3的结果可知,直接法与间接法的差,相比于无滑动伪影情况而言,有滑动伪影时的平均以及标准偏差均会增大。
[0256]
从病例1~3的结果可知,在每次都发生同等程度的滑动量的情况下,直接法与间接法的vor
gain
差的标准偏差并非一定会增大。由此可认为,能够对检查精度进行最佳推测的参数是直接法(角度比)与间接法的vor
gain
的差的平均。
[0257]
根据病例1~3的结果可知,间接法的vor
gain
无论有无滑动伪影,平均以及标准偏差均稳定。
[0258]
符号说明
[0259]
100分析系统
[0260]
101控制部
[0261]
102主存储装置
[0262]
103辅助存储装置
[0263]
104i/o界面
[0264]
105通信界面
[0265]
106输入装置
[0266]
107输出装置
[0267]
108显示装置。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。