1.本实用新型涉及高度传感器技术领域,具体的是一种智慧工地系统的高度传感器。
背景技术:
2.智慧工地系统一般是对工地情况进行监测,其中高度传感器的原理是测得滑臂与基准线的夹角,通过角度大小来换算出相应的熨平板的高度,高度传感器可精确测得夹角的角度,高度传感器通常位于户外,用于监测工地吊塔等高空作业时的高度,但是由于工地灰尘扬起较多,在检测高度时扬起的灰尘容易覆盖在检测传感镜片上,传感镜片需要射出感应射线进行高度感应,容易被镜片上的灰尘阻挡,从而影响传感效果,且传感器工作时工作人员接触不到,不能实时对覆盖的灰尘进行清理,提高了检测高度的难度。
技术实现要素:
3.针对上述问题,本实用新型提供一种智慧工地系统的高度传感器。
4.为了实现上述目的,本实用新型是通过如下的技术方案来实现:一种智慧工地系统的高度传感器,其结构包括感应机构、固定板、拆卸盖,其特征在于:所述拆卸盖嵌固在感应机构侧面,所述固定板安装于感应机构内部,所述感应机构设有投射机构、电子板、感应器、机壳,所述投射机构嵌固在感应器左侧,所述电子板与感应器电线连接,所述投射机构位于机壳左侧,所述电子板安装于机壳内部,所述固定板安装于机壳内部。
5.更进一步的,所述投射机构设有投射器、清理机构、连接器,所述连接器与清理机构电连接,所述清理机构安装于投射器左侧,所述投射器嵌固在感应器左侧,所述连接器能进行无线控制。
6.更进一步的,所述清理机构设有固定环、伸缩机构、控制器,所述控制器嵌固在固定环内部,所述伸缩机构安装于固定环内侧,所述固定环安装于投射器左侧,所述连接器与控制器电连接,所述伸缩机构设有十二个,环形组成一个圆形,所述伸缩机构的一面设有海绵材质,具有擦拭效果。
7.更进一步的,所述伸缩机构设有受力板、海绵板、空心板、气压机、三角块、伸缩杆、收缩板,所述气压机嵌固在受力板内部,所述伸缩杆安装于气压机内,所述伸缩杆嵌固在三角块下端,所述三角块嵌固在收缩板内,所述收缩板嵌固在空心板内,所述空心板安装于受力板内侧,所述海绵板贴合在空心板侧面,所述气压机安装于固定环内侧,所述空心板、收缩板与三角块依次变小,且其内部为空心状态,所述三角块与收缩板的一面设有海绵材质,具有擦拭效果。
8.与现有技术相比,本实用新型具有如下有益效果:
9.1、本实用新型中机壳通过投射机构的显示位置,调整感应机构与固定板的角度,且感应器对高度进行感应计算,达到实时了解高度的效果,当设备使用时,高度显示为零时射线被灰尘阻挡,从而高度显示为零时能自动控制连接器,从而在使用时控制连接器,使投
射机构中的清理机构对投射器进行闭合,使清理机构进行开合,从继而连接器控制控制器发出指令,使得每个伸缩机构进行收缩,防止投射器外界的灰尘进入,同时伸缩机构对投射器进行擦拭,防止灰尘的停留。
10.2、本实用新型中气压机带动伸缩杆进行伸缩,使得三角块收缩进收缩板里面,收缩板收缩进空心板内部,同时海绵板跟随收缩,防止间隙的产生,张开时相邻的海绵板相互贴合,达到对投射器开合的效果,防止灰尘遮盖住投射器。
附图说明
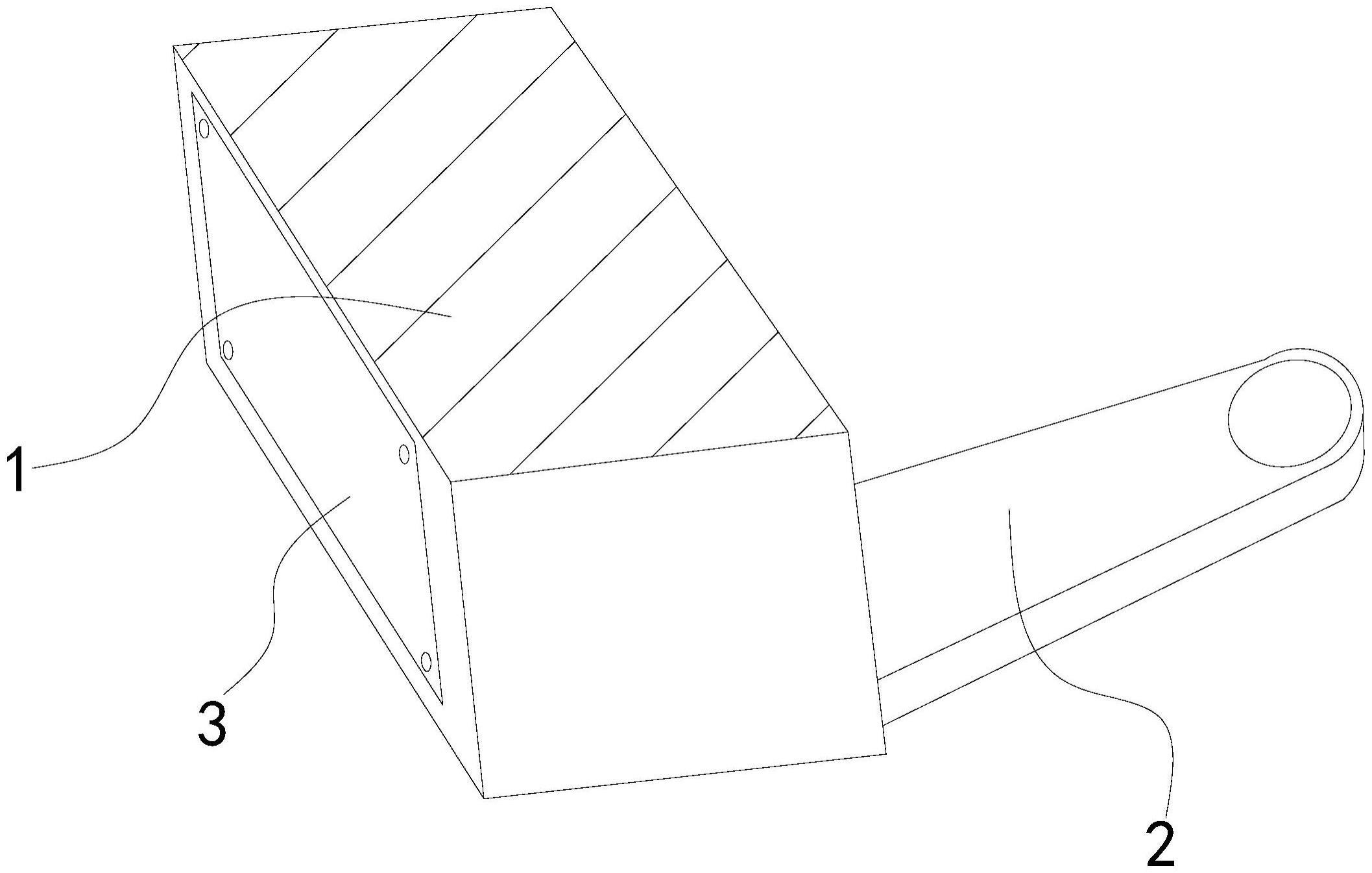
11.图1为本实用新型一种智慧工地系统的高度传感器的结构示意图。
12.图2为本实用新型一种感应机构的侧面结构示意图。
13.图3为本实用新型一种投射机构的侧面结构示意图。
14.图4为本实用新型一种清理机构的平面结构示意图。
15.图5为本实用新型一种伸缩机构的平面结构示意图。
16.图中:感应机构-1、固定板-2、拆卸盖-3、投射机构-11、电子板-12、感应器-13、机壳-14、投射器-w1、清理机构-w2、连接器-w3、固定环-w21、伸缩机构-w22、控制器-w23、受力板-e1、海绵板-e2、空心板-e3、气压机-e4、三角块-e5、伸缩杆-e6、收缩板-e7。
具体实施方式
17.下面将结合附图对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例是本实用新型一部分实施例,而不是全部的实施例,基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.在本实用新型的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
19.实施例
20.如图1-图5所示,本实用新型提供一种智慧工地系统的高度传感器,其结构包括感应机构1、固定板2、拆卸盖3,其特征在于:所述拆卸盖3嵌固在感应机构1侧面,所述固定板2安装于感应机构1内部,所述感应机构1设有投射机构11、电子板12、感应器13、机壳14,所述投射机构11嵌固在感应器13左侧,所述电子板12与感应器13电线连接,所述投射机构11位于机壳14左侧,所述电子板12安装于机壳14内部,所述固定板2安装于机壳14内部,所述机壳14右侧设有电机与电子控制器,电子控制器与感应器13点连接,从而机壳14通过投射机构11的显示位置,调整感应机构1与固定板2的角度,且感应器13对高度进行感应计算,达到实时了解高度的效果。
21.所述投射机构11设有投射器w1、清理机构w2、连接器w3,所述连接器w3与清理机构w2电连接,所述清理机构w2安装于投射器w1左侧,所述投射器w1嵌固在感应器13左侧,所述连接器w3能进行无线控制,从而清理机构w2对投射器w1进行闭合,在使用时控制连接器w3,
使清理机构w2进行开合,防止灰尘遮盖住投射器w1。
22.所述清理机构w2设有固定环w21、伸缩机构w22、控制器w23,所述控制器w23嵌固在固定环w21内部,所述伸缩机构w22安装于固定环w21内侧,所述固定环w21安装于投射器w1左侧,所述连接器w3与控制器w23电连接,所述伸缩机构w22设有十二个,环形组成一个圆形,所述伸缩机构w22的一面设有海绵材质,具有擦拭效果,从而连接器w3控制控制器w23发出指令,使得每个伸缩机构w22进行收缩,达到对投射器w1开合的效果。
23.所述伸缩机构w22设有受力板e 1、海绵板e2、空心板e3、气压机e4、三角块e5、伸缩杆e6、收缩板e7,所述气压机e4嵌固在受力板e 1内部,所述伸缩杆e6安装于气压机e4内,所述伸缩杆e6嵌固在三角块e5下端,所述三角块e5嵌固在收缩板e7内,所述收缩板e7嵌固在空心板e3内,所述空心板e3安装于受力板e 1内侧,所述海绵板e2贴合在空心板e3侧面,所述气压机e4安装于固定环w21内侧,所述空心板e3、收缩板e7与三角块e5依次变小,且其内部为空心状态,所述三角块e5与收缩板e7的一面设有海绵材质,具有擦拭效果,从而气压机e4带动伸缩杆e6进行伸缩,使得三角块e5收缩进收缩板e7里面,收缩板e7收缩进空心板e3内部,同时海绵板e2跟随收缩,防止间隙的产生,张开时相邻的海绵板e2相互贴合,防止灰尘通过。
24.下面对本实用新型的工作原理做如下说明:机壳14通过投射机构11的显示位置,调整感应机构1与固定板2的角度,且感应器13对高度进行感应计算,达到实时了解高度的效果,当设备使用时,高度显示为零时射线被灰尘阻挡,从而高度显示为零时能控制连接器w3,使投射机构11中的清理机构w2对投射器w1进行闭合,使清理机构w2进行开合,继而连接器w3控制控制器w23发出指令,使得每个伸缩机构w22进行收缩,继而气压机e4带动伸缩杆e6进行伸缩,使得三角块e5收缩进收缩板e7里面,收缩板e7收缩进空心板e3内部,同时海绵板e2跟随收缩,防止间隙的产生,张开时相邻的海绵板e2相互贴合,达到对投射器w1开合的效果,防止灰尘遮盖住投射器w1。
25.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
26.因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。