技术特征:
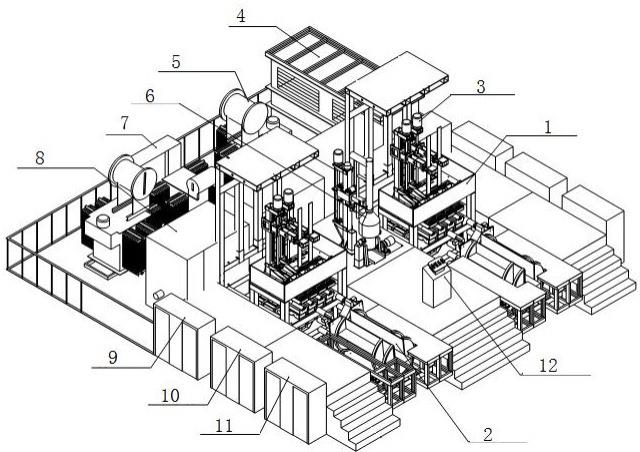
1.一种全截面阳极钢爪电渣焊系统,其特征在于,所述电渣焊系统包括:控制装置、化渣系统、四自由度极板送进系统、焊机主体和钢爪翻转机;所述化渣系统与所述焊机主体的焊接口连通,所述化渣系统用于将熔渣融化,融化后的熔渣输送至所述焊机主体的焊接口;电极板设置在所述四自由度极板送进系统上,所述四自由度极板送进系统用于带动所述电极板穿设于所述焊接口;所述四自由度极板送进系统的控制端与所述控制装置连接;所述控制装置用于对所述四自由度极板送进系统进行控制;所述钢爪翻转机与所述四自由度极板送进系统对应设置,所述钢爪翻转机用于固定和翻转待焊接或待修复的阳极钢爪。2.根据权利要求1所述的全截面阳极钢爪电渣焊系统,其特征在于,所述钢爪翻转机包括:钢爪夹紧装置、导杆夹紧装置、主托举板和主体框架;所述钢爪夹紧装置固定设置在所述主体框架上;所述主托举板可滑动的设置在所述主体框架上;所述导杆夹紧装置可转动的设置在所述主托举板上;所述导杆夹紧装置用于夹紧与所述阳极钢爪连接的阳极导杆,所述钢爪夹紧装置用于夹紧所述阳极钢爪,在焊接时,所述主托举板带动所述导杆夹紧装置向所述钢爪夹紧装置移动,使所述导杆夹紧装置和所述钢爪夹紧装置接触并固定,当焊接完成一面后进行下一面的焊接时,所述钢爪夹紧装置解除对阳极钢爪的夹紧,所述主托举板带动所述导杆夹紧装置远离所述钢爪夹紧装置,所述导杆夹紧装置和所述钢爪夹紧装置分离后,所述导杆夹紧装置旋转带动所述阳极导杆和所述阳极钢爪翻转。3.根据权利要求2所述的全截面阳极钢爪电渣焊系统,其特征在于,所述导杆夹紧装置包括:导杆夹紧本体及设置在所述导杆夹紧本体的外侧的多个主回转盘;多个所述主回转盘分别与所述主托举板上设置的多个支撑轮组一一对应设置,多个所述支撑轮组中至少有一个驱动轮组。4.根据权利要求2所述的全截面阳极钢爪电渣焊系统,其特征在于,所述主托举板的下表面设置有推力支座,所述推力支座与液压导杆驱动装置的驱动导杆的端部连接,所述液压导杆驱动装置的液压缸通过油缸耳座固定在主体框架上。5.根据权利要求1所述的全截面阳极钢爪电渣焊系统,其特征在于,所述化渣系统包括:碳棒升降机构、碳棒、坩埚、化渣变压器、控制变压器和控制接触器;所述碳棒升降机构对应所述坩埚的开口部设置,所述碳棒设置于所述碳棒升降机构上;所述碳棒升降机构用于带动所述碳棒进行升降运动;所述化渣变压器的二次侧线圈的一端与碳棒连接,所述化渣变压器的二次侧线圈的另一端与坩埚连接,所述坩埚用于盛放熔渣;所述控制变压器的二次侧线圈与所述控制接触器的输入侧连接,所述控制接触器的输出侧的两端分别与所述碳棒和所述坩埚连接,所述控制变压器的二次侧线圈中的电流的大小为熔焊电流。6.根据权利要求5所述的全截面阳极钢爪电渣焊系统,其特征在于,所述化渣系统还包括翻转结构,所述控制变压器二次侧线圈的通路上还设置有电流传感器,所述坩埚设置于所述翻转结构上,所述翻转结构和所述电流传感器均与控制装置连接;
所述控制装置用于根据所述熔焊电流控制所述翻转结构翻转,将融化后的焊渣倒入所述焊机主体的焊接口内。7.根据权利要求1所述的全截面阳极钢爪电渣焊系统,其特征在于,所述焊机主体包括上结晶器、下结晶器、滑动门型架和熔焊变压器;所述上结晶器上开设有焊接口,所述上结晶器固定于滑动门型架上,所述滑动门型架与所述控制装置连接,所述控制装置用于控制所述滑动门型架运动;所述下结晶器上设置有多个弧形支撑槽,在每个所述弧形支撑槽的开口端设置有支撑部,所述弧形支撑槽用于容纳待焊接钢爪的抓头,所述支撑部用于放置待焊接钢爪的钢梁;所述上结晶器和所述下结晶器均与熔焊变压器的二次侧线圈的一端连接,所述熔焊变压器的二次侧线圈的另一端与所述电极板连接。8.根据权利要求1所述的全截面阳极钢爪电渣焊系统,其特征在于,所述控制装置包括plc控制器和多个伺服驱动模块;所述plc控制器分别与多个所述伺服驱动模块的控制端连接;多个所述伺服驱动模块分别用于驱动设置于四自由度极板送进系统中的伺服电机、设置于化渣系统中的伺服电机和设置于焊机主体的伺服电机。9.根据权利要求8所述的全截面阳极钢爪电渣焊系统,其特征在于,所述伺服电机的输出轴均连接斜齿轮。10.根据权利要求1所述的全截面阳极钢爪电渣焊系统,其特征在于,四自由度极板送进系统、焊机主体和钢爪翻转机的数量均为两个。
技术总结
本发明公开一种全截面阳极钢爪电渣焊系统,所述电渣焊系统包括:控制装置、化渣系统、四自由度极板送进系统、焊机主体和钢爪翻转机;所述化渣系统用于将熔渣融化,融化后的熔渣输送至所述焊机主体的焊接口;所述四自由度极板送进系统用于带动所述电极板穿设于所述焊接口;所述控制装置用于对所述四自由度极板送进系统进行控制;所述钢爪翻转机与所述四自由度极板送进系统对应设置,所述钢爪翻转机用于电极板翻转。本发明实施例通过设置化渣系统、四自由度极板送进系统、焊机主体和钢爪翻转机,实现了全截面阳极钢爪的自动化焊接,提高了焊接效率和质量。高了焊接效率和质量。高了焊接效率和质量。
技术研发人员:姜彦平 姜慕春
受保护的技术使用者:内蒙古世星新材料科技有限公司
技术研发日:2023.07.14
技术公布日:2023/8/14
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。