1.本发明涉及直升机推进系统的一般领域,并且更具体地涉及用于直升机的混合推进系统的领域,具体地涉及被称为单发动机直升机的直升机。
背景技术:
2.单发动机直升机是包括推进系统的直升机,该推进系统包括单个主发动机,通常是内燃发动机,并且例如是涡轮发动机,用于经由被称为mgb的主齿轮箱来驱动主旋翼并且经由被称为rgb的后齿轮箱来驱动后尾旋翼(也称为反扭矩旋翼的首字母缩写atr)。
3.推进系统还可以包括用于辅助直升机的设备。辅助设备在紧急情况下使用,以便瞬间为直升机贡献动力,并且更准确地说,为主旋翼和后旋翼提供动力。
4.第一个紧急情况是主发动机故障。在这种情形中,飞行员随后启动降级飞行模式,被称为自转飞行。辅助设备允许在自转飞行期间机械地辅助直升机,特别是在飞行的第一和/或最后阶段(在着陆之前完成“拉平”)。因此,这种类型的辅助设备可以显著帮助飞行员完成自转着陆。
5.第二种紧急情况是例如在避障或高空温度反转期间立即需要附加的动力。
6.从文献fr3 019 588中已知了用于集成辅助设备的不同架构。辅助设备包括由具有固态存储的气体发生器供应动力的用于驱动轴旋转的涡轮,以及用于向驱动涡轮供应动力的受控部件。在本例中,通过直接在mgb处、或在前传动轴处、或在涡轮发动机(主发动机)的自由涡轮的轴处引入该动力,轴的机械旋转动力被用来驱动直升机的主旋翼。
7.这种推进系统会导致体积问题。事实上,将这种类型的辅助设备集成到一个已经很紧凑的发动机舱中,会对直升机的机身并且在主发动机处以及在主发动机与mgb之间的动力传输方面产生相当大的改变。
8.此外,在主涡轮发动机的自由涡轮上引入这种动力有几个缺点。
9.第一个缺点是,在主涡轮发动机的自由涡轮的气体供应出现故障的情况下,它不会产生驱动扭矩,并且会在空气动力摩擦损失的影响下非常迅速地减速。这些损失可以达到几十千瓦(kw)。由此可以理解,取决于上面提及的应用实例,即主发动机故障或者立即需要附加动力来避开障碍物,主旋翼有效看到的驱动动力是不同的,这可能会让直升机的飞行员感到惊讶。
10.第二个缺点是,当经由自由涡轮注入辅助动力时,在所述自由涡轮和/或涡轮发动机的机械下游组件(并且特别是配备有这种类型的减速齿轮箱的涡轮发动机的减速齿轮箱)发生故障的情况下,则不可能将这种辅助动力供应给主齿轮箱和后齿轮箱。
11.第三个缺点是需要在涡轮发动机上提供特定的接口,以允许将这种辅助动力注入到自由涡轮上。
12.此外,直升机的涡轮发动机的动力在热力学方面受到限制,并且由于传输到直升机的主旋翼的机械扭矩通过减速齿轮箱并且通过主齿轮箱,因此直升机的涡轮发动机的动力还在机械方面受到限制。
13.当环境温度和高度较低时,众所周知,经由mgb输入而经过的动力通过设计而受限于不得连续超过的扭矩值。因此,当直升机的旋翼的转速降低时,例如为了限制声学污染,则递送到旋翼的动力成比例地降低。另一方面,当温度和高度较高时,由直升机涡轮发动机所递送的动力会受到自由涡轮的热力学动力的限制。
14.从文献fr3 062 882中获知单发动机直升机的推进系统,包括主发动机,主发动机连接到前传动轴和后传动轴,其分别能够驱动mgb和rgb;辅助设备,该辅助设备被固定到主发动机,并且允许通过在所述后传动轴上引入动力来机械地驱动rgb和mgb。
15.然而,该文献中描述的辅助设备使用辅助能源,诸如烟火和/或电工和/或电气和/或液压和/或气动部件。该辅助能源形成了要被集成到直升机的推进系统中的附加元件,因此增加了辅助设备的体积和总质量,并且因此增加了推进系统的体积和总质量。从文献fr3 080 835中还已知一种辅助系统,其仅具有单个可逆电机,其需要与蓄电池相关联以在马达模式下操作并经由mgb来辅助主发动机。系统允许的辅助的可用性和持续时间必然受到蓄电池容量及其在需要时的有效充电的限制。
技术实现要素:
16.为此,本发明提出了一种包括辅助设备的直升机的推进系统,该辅助设备允许纠正上述缺点,并且特别是优化辅助设备的集成,同时减少质量和体积。
17.在本发明的一个目的中,提出了一种用于直升机的推进系统,包括:主发动机、主旋翼、包括机械地连接到主旋翼的输出的主齿轮箱、机械地耦接在主发动机和主齿轮箱的第一输入之间的减速齿轮箱以及辅助设备。
18.根据本发明的技术特征,辅助设备包括第一电机和第二电机,该第一电机机械地耦接到减速齿轮箱并被配置为作为发电机操作以取走由主发动机产生的能量,该第二电机机械地耦接到主齿轮箱的第二输入,该第二电机由第一电机供应电力并被配置为作为电动马达操作以向主齿轮箱递送附加机械功率。
19.因此,根据本发明的推进系统提出了一种架构,既适用于具有自由涡轮的涡轮发动机,也适用于具有链接涡轮的涡轮发动机,并且允许经由动力取走使用减速齿轮箱上游可用的全部热力学功率,该动力取走借助于在主发动机和主齿轮箱之间生成辅助耦接的两个电机来实现。
20.事实上,根据本发明的推进系统因此允许具有使用主发动机可以提供的附加能量来补偿由减速齿轮箱所生成的扭矩损失的辅助设备。换句话说,由于气体发生器上可用的能量的量而恢复了由减速齿轮箱所引发的功率损失,并且其可以通过辅助设备被转化为推进电能,即被用来向主齿轮箱递送附加机械功率。
21.因此,当递送到mgb的功率受到在包括主发动机和减速齿轮箱在内的发动机推进单元的输出处和/或在mgb的输入处所允许的最大扭矩的限制时,安装在减速齿轮箱上游的电机在mgb的另一个输入上向以马达模式操作的另一个电机供应电能。通过主旋翼的桅杆传递的这种附加功率可以被用于需要过剩升力(避开障碍物
……
)的紧急情况,而不会损坏减速齿轮。
22.根据推进系统的第一方面,推进系统还可以包括电子控制单元,该电子控制单元与第一电机和第二电机电耦接并被配置为根据主发动机的可用输出扭矩并且根据主齿轮
箱所需的输出扭矩来控制第一电机和第二电机的操作。
23.根据推进系统的第二方面,电子控制单元可以包括测量部件和控制部件,该测量部件被配置为连续测量在主齿轮箱的第一输入处的瞬时扭矩,该控制部件被配置为当由测量部件测量的扭矩小于主齿轮箱所需的输出扭矩时控制第一电机的操作以向第二电机供应功率,并且命令增加操作速度,以供应第二电机的电功率供应所需的附加能量。
24.还可以将在主齿轮箱的第一输入上测量的瞬时扭矩与该第一输入处的最大允许扭矩进行比较。如果测量的扭矩达到最大允许扭矩,则电子控制单元可以命令不再增加主发动机的操作速度,同时继续命令第一电机作为发电机操作以向第二电机供电。
25.根据推进系统的第三个方面,控制单元可以被配置为当主旋翼在需要主旋翼以其标称速度进行操作的飞行阶段中以低于所述标称速度的速度操作时控制第一电机和第二电机以补偿主齿轮箱的输出功率的不足。
26.根据推进系统的第四方面,主发动机可以包括机械地连接到减速齿轮箱的输出轴,并且第一电机包括转子和定子,转子由主发动机的输出轴的电磁部分形成,并且定子围绕主发动机的输出轴的所述电磁部分而被安装。
27.根据推进系统的第五方面,在第一电机中,减速齿轮箱可以是同时耦接到主发动机、第一电机和主齿轮箱的行星齿轮减速齿轮箱。
28.根据推进系统的第六方面,推进系统还可以包括耦接到减速齿轮的输出的超越离合器、耦接在超越离合器和反扭矩旋翼之间的后传动轴、以及耦接在主齿轮箱的第一输入和超越离合器之间的前传动轴。
29.根据推进系统的第七方面,辅助设备还可以包括电耦接到第一电机的用于存储能量的至少一个部件。电子控制单元然后可以被配置为根据第一电机正在发电时的能量需求而将电能从第一电机传输到能量存储装置或者传输到第二电机。
30.根据本发明的另一个目的,提出了一种包括如上定义的推进系统的直升机。
31.根据本发明的另一个目的,提出了一种用于辅助如上所定义的直升机的推进系统的系统的方法,该方法包括:借助于将第一电机作为发电机操作的命令来要求激活从推进系统的主发动机中取走机械能,激活要求是取决于由直升机的飞行员、或由发动机的控制计算机、或由直升机的航空电子设备验证的至少一个特定条件的决定的结果。
32.在辅助方法的一个方面,激活要求可以是发动机的控制计算机在它检测到主发动机的操作点位于一组预定操作点中时的决定的结果,对于该组预定操作点,主发动机的操作速度低于主发动机的标称操作速度的百分比阈值,并且与主发动机和直升机的期望动态相比,返回到大于所述百分比阈值的更高速度的加速瞬态被认为太长,并且其中激活要求伴随有用于增加主发动机的操作速度的命令,以使得减少可能的加速瞬变的持续时间以对应于所述期望动态。
33.优选地,主发动机的标称操作速度的所述百分比阈值包括在80%和85%之间。
附图说明
34.[图1]图1是提供有根据本发明的第一实施例的推进系统的直升机的示意图。
[0035]
[图2]图2是提供有根据本发明的第二实施例的推进系统的直升机的示意图。
[0036]
[图3]图3示出了根据本发明的一种实施模式的用于辅助直升机的推进系统的方
法的流程图。
具体实施方式
[0037]
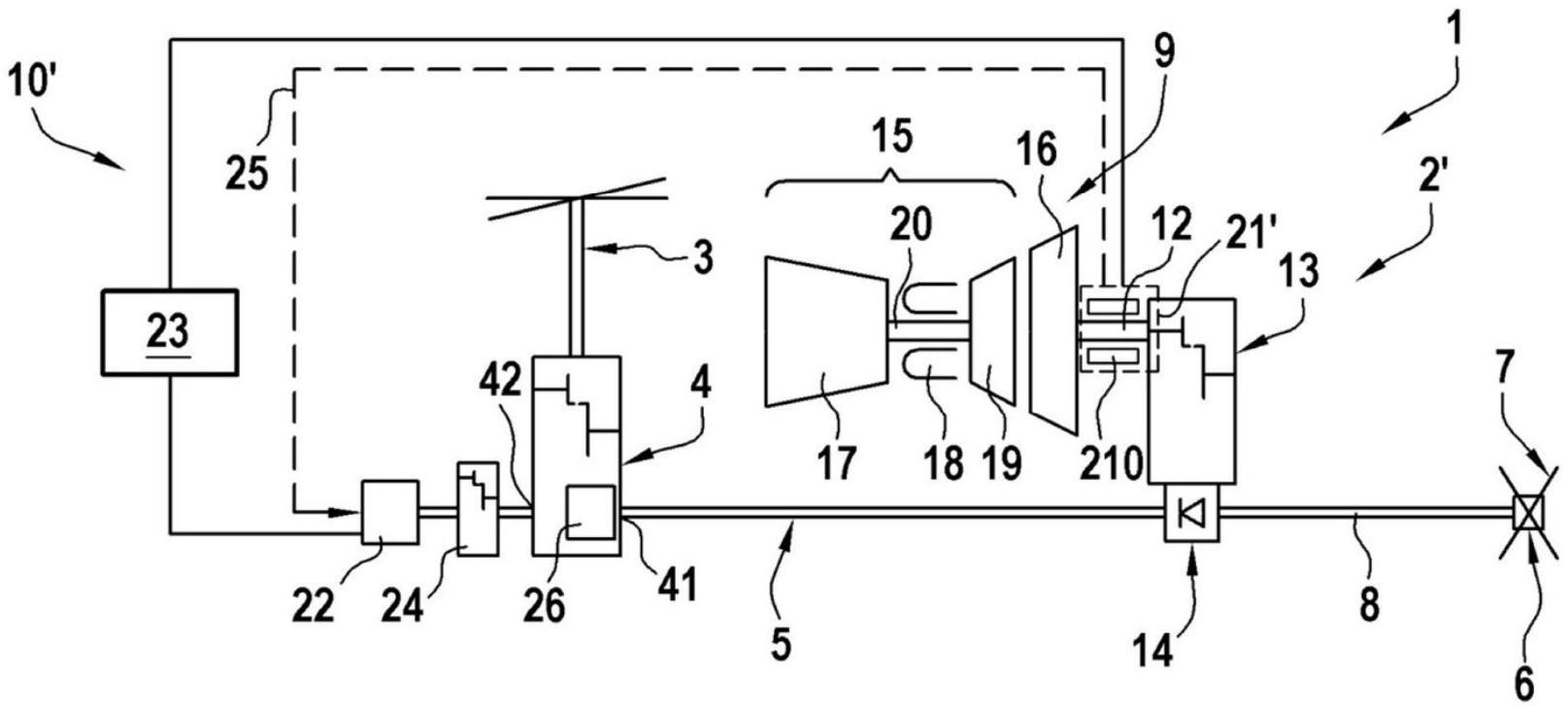
在图1中示意性地示出了包括根据本发明的第一实施例的推进系统2的直升机1。
[0038]
推进系统2包括主旋翼3、主齿轮箱4(以下称为mgb)、前传动轴5、后齿轮箱6(以下称为rgb)和通常被称为反扭矩旋翼(atr)的后旋翼7。主旋翼3由mgb 4驱动,mgb 4本身由前传动轴5驱动。同样,后旋翼7由rgb 6驱动,rgb 6本身由后传动轴8驱动。在本例中,前后传动轴5、8基本上同轴。
[0039]
直升机1的推进系统2还包括主发动机9和在紧急情况下使用的辅助设备10,以便瞬间向直升机1贡献附加的动力,并且更准确地说是向主旋翼3贡献附加的动力。
[0040]
根据图1和图3中所图示的实施例,主发动机9包括输出轴12,输出轴12经由减速齿轮箱13、然后第一超越离合器14(被称为推进超越离合器)而机械地连接到前后传动轴5、8。需要注意的是,在本发明中,与传动轴5、8相关联的术语“前”和“后”是取决于第一超越离合器14来表达的。
[0041]
如图1中所图示,这里的主发动机是由气体发生器15和自由涡轮16形成的涡轮发动机,输出轴12附接到自由涡轮16。气体发生器15以已知的方式包括至少一个空气压缩机17,其向燃烧室18供应压缩空气中的燃料,压缩空气将热气体递送到至少一个气体膨胀涡轮19,该气体膨胀涡轮19经由驱动轴20驱动压缩机17旋转。气体然后驱动用于传输动力的自由涡轮16,也被称为动力涡轮。
[0042]
作为一种变体,通常,主发动机9可以对应于任何类型的内燃发动机。
[0043]
如图1中所图示,辅助设备10包括第一电机21、第二电机22和电子控制单元23。
[0044]
第一电机21机械地耦接到减速齿轮箱13,并且被配置为作为电能发电机操作,从而将经由减速齿轮箱13从主发动机9取走(take off)的机械能转化为电能。
[0045]
第二电机22可能经由齿轮系24而机械地连接到mgb 4,如图1中所图示,并且经由至少一根电缆25而电连接到第一电机21。由于电缆25,因此第一电机21可以使用由主发动机9递送并经由减速齿轮13回收的一部分能量来为第二电机22供应电力。
[0046]
第二电机22就其本身而言被配置为作为电动马达操作,并且因此使用由第一电机经由电缆15供应的电能以机械扭矩的形式将机械能递送到mgb 4。
[0047]
电子控制单元23不仅耦接到第一电机21和第二电机22,如图1中所图示,而且还耦接到主发动机9。
[0048]
电子控制单元23被配置为根据主旋翼3在mgb 4的输入处接收到的扭矩和在mgb 4的输出处所需的扭矩来控制第一电机21和第二电机22的操作。
[0049]
mgb 4包括机械地连接到前传动轴5的第一输入41和可能经由齿轮系24而机械地连接到第二电机22的第二输入。电子控制单元23包括扭矩测量模块26,其被安装在第一输入41上并被配置为连续测量在mgb的第一输入41处接收到的扭矩,该机械扭矩经由超越离合器14而源自减速齿轮箱13。
[0050]
当mgb 4所需的输出扭矩大于在其第一输入41处测量的扭矩时,电子控制单元23控制主发动机9产生比其当前产生的更大的机械扭矩,并激活第一电机21,以使得它取走由主发动机9供应的附加扭矩部分,并且因此向第二电机22供应电力,第二电机22然后可以向
mgb 4的第二输入42供应附加机械扭矩。mgb 4然后可以供应的扭矩大于在其第一输入41处接收到的机械扭矩,或者甚至等于主旋翼2所需的扭矩。
[0051]
因此,当涡轮发动机的气体发生器15(ng)的速度较低(即,小于气体发生器15的标称速度的85%)时,利用现有技术中描述的辅助设备返回高速(即大于气体发生器的标称速度的85%)的瞬变可能较长,并且涡轮发动机的动力学以及因此直升机的动力学受到强烈影响。
[0052]
由于由根据本发明的推进系统2的辅助设备10实现的动力取走(power take-off),由于主发动机9以及第一电机21和第二电机22由电子控制单元23控制,因此有可能以所说的高速度通过电路人为地取走动力。
[0053]
通过维持高速,可以将动力的一部分分配给注入到mgb 4中的机械扭矩,并将其剩余部分分配给将产生电力的第一电机21,该电力例如可以可选地为第二电机供电或为储能器(诸如电池)充电。还可以想到提供用于耗散由第一电机21产生的电力的部件,例如借助于电阻器的热耗散,其可以被选择性地进行控制,特别是在下文提到的希望人为地提高气体发生器的速度的情况下。所产生的电力的这种耗散可以允许增加由动力取走(power takeoff)取走的能量,和/或耗散在电池充满并且不需要激活第二电机22时取走的能量,并且因此在任何情况下增加气体发生器的速度,同时仍保持被注入到mgb 4中的相同机械扭矩。
[0054]
为了激活动力取走(步骤340),必须组合至少两个条件,如图3中所指示,图3呈现了根据一种实施模式的用于辅助直升机的推进系统的方法的流程图。遵循动力取走的激活要求(步骤300),有必要验证(步骤320)驱动扭矩的极限正在发生,这对应于减速齿轮可以传送和/或mgb可以在其第一输入41处接受的扭矩的极限,并验证(步骤330)发动机的热极限没有发生(该极限可以取决于气体发生器15的速度或者取决于发动机的给定隔间中的温度)。
[0055]
动力取走的激活要求可能是取决于至少一个特定条件而做出的决定的结果,该至少一个特定条件由直升机的飞行员或由发动机的控制计算机(诸如fadec)或者甚至由直升机的航空电子设备来验证,此列表并非详尽的。因此,在每一个都可以触发动力取走的激活要求的不同类型的决定之中,将特别注意以下三个类别。
[0056]
源自飞行员的决定。飞行员知道,通过在气体涡轮的输出扭矩的极限下(或在mgb的输入处)要求激活动力取走,他将拥有一个响应更灵敏的推进系统。事实上,动力取走的激活导致推进系统的主发动机的操作速度增加,即发动机的气体发生器的速度,或者在双发动机机器或三发动机机器的情况下主发动机的速度。这种增加的速度有利于推进系统的加速能力,特别是在没有发动机故障的起飞期间(对于所有发动机都工作,被称为aeo起飞),但是尤其是当直升机的推进系统有两个或三个发动机时在其中一台发动机发生故障的起飞期间(对于一个发动机不工作,被称为oei起飞)。
[0057]
源自发动机的控制计算机(fadec)的决定。在第一种配置中,计算机实时监控主旋翼速度的误差,该误差是主旋翼的测量速度与主旋翼的设定点速度之间的差距。如果这个差距的值太高(设定点和测量值之间的差异大于阈值),则意味着正在发生大的瞬态附加功率需求。动力取走然后可以帮助提高主旋翼的有效速度。
[0058]
在第二种配置中,计算机实时监控主旋翼的速度随时间的变化。无需等待主旋翼
的速度达到临界值,例如低于主旋翼的标称速度的85%,如果主旋翼随时间的变化的下降斜率大于绝对值阈值,则计算机触发动力取走。
[0059]
源自航空电子设备的决定。例如,如果由航空电子设备测量的直升机的水平速度小于阈值,例如等于50节,其表示直升机处于起飞或着陆阶段。因此,在气体发生器的自由涡轮的输出扭矩的极限下使动力取走增加气体发生器的速度以便能够补偿在其中一个发动机不工作(oei)的情况下的起飞或着陆的可能情况是有利的。在另一个示例中,如果主旋翼的速度的设定点被稳定为低于主旋翼的标称速度,例如标称速度的90%,以便限制噪音,这意味着主旋翼的速度被调节在相对接近主旋翼的失速速度的较低值(该失速速度例如位于标称速度的80%和85%之间)。动力取走然后允许增加双发动机推进系统的两个主发动机的ng速度。这意味着,在其中一个发动机发生oei故障的情况下,健康发动机的更高速度将允许其具有附加扭矩储备,其可以通过停用动力取走而被即时地供应给主旋翼,从而允许在oei故障后限制nr速度的下降,使得nr速度被保持高于失速速度。
[0060]
一旦动力取走被激活,某些操作点处的效率降级肯定会略微增加燃料消耗,但是尤其会允许人为地增加气体发生器15的速度,同时保持注入到mgb 4中的相同机械扭矩。
[0061]
通过在电子控制单元中的存储器中存储在加速期间不允许令人满意的瞬态的主发动机9的操作点以保证直升机1的主旋翼3的正确操作,辅助设备10允许具有可用的瞬时附加扭矩储备。因此,当发动机的控制计算机检测到主发动机的操作点位于一组预定操作点中时,动力取走的激活要求可能是发动机的控制计算机的决定的结果,对于这些预定操作点,主发动机的操作速度低于主发动机的标称操作速度的百分比阈值,并且与主发动机的期望动态以及因此直升机的期望动态相比,返回到大于所述百分比阈值的较高速度的加速瞬态被认为太长。动力取走的激活要求随后伴随着用于增加主发动机的ng操作速度的命令,以使得减少可能的加速瞬态的持续时间以对应于主发动机的期望动态。
[0062]
主发动机的操作速度的所述百分比阈值可以被包括在80%和85%之间。
[0063]
这种控制策略和预期效果之所以成为可能,是因为电气技术和控制的快速性使得涡轮发动机的输出轴上针对动力取走取走的扭矩瞬时下降。
[0064]
图2中示意性地示出了提供有根据第二实施例的推进系统2的直升机1。
[0065]
与图1中所图示的第一实施例相同的元件具有相同的数字标号。
[0066]
图2中所图示的第二实施例与图1中所图示的第一实施例的不同之处在于,辅助设备10'的第一电机21'包括由主发动机9的输出轴12的一部分(以及更特别是通过安装在机械输出轴12上的电磁元件)形成的转子,以及围绕形成转子的输出轴12的部分而布置的定子210。
[0067]
第一电机21'因此连接在减速齿轮13的上游,更具体地连接在主发动机9和减速齿轮箱13之间。
[0068]
因此,根据本发明的推进系统提供了一种辅助设备,允许通过减少质量和体积来优化辅助设备的集成。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。