一种用于光栅读数头位移偏移校准的方法
(一)技术领域
1.本发明涉及的是一种用于光栅读数头位移偏移校准的方法,可用于工作台位移测量优化、校准等领域,属于精密位移测量技术领域。
(二)
背景技术:
2.光栅测量系统作为精密位移传感器,广泛应用于需要高精度及高分辨率的定位装置中,其测量精度直接影响装置的定位及重复定位精度。另一方面,随着微纳加工、半导体等技术的发展,对精密加工机床、电子制造设备等都提出了更高的定位精度及重复定位精度要求,因此对光栅尺的测量精度提出了挑战。
3.传统的位移测量系统采用激光干涉仪来测量工作台位置,该系统是一种比较成熟的超精密测量系统,能够测量亚纳米量级的位移变化量并进行大量程的测量,但激光干涉仪在大量程范围下对环境等因素较为敏感,不能满足更高精度的测量需求。目前普遍采用光栅尺来替代激光干涉仪作为位移测量的标尺。与激光干涉仪相比,光栅尺位移测量系统鲁棒性强,有良好的抗干扰能力,也能够满足工作台位移测量的精度需求。光栅尺以光栅周期作为测量基准,具有测量光程短,环境变化敏感性低等优点,测量精度亦可达到亚纳米量级。
4.根据矢量衍射理论推导出光斑位移与测量光束相位差之间的关系表达式,利用相位差相等建立关系式,可以推导出描述光斑位移与光栅尺测量计数之间变化关系的位移模型;其次根据测量系统的布局,定义所需参量,通过坐标系转换关系式,可以建立描述光斑位移与工作台位置变化关系的位置模型。最后根据位移相等原则将位移模型和位置模型这两者建立等式,得到光栅尺测量计数与工作台之间变化关系的测量系统全局模型。因此可以直接利用光栅尺测量计数来间接求解工作台位置。
5.在解算工作台运动轨迹时一般对光栅读数头位移偏移误差的处理方法有两种,一是假定系统处于理想状态,不存在光栅读数头位移偏移误差,3读数头组合和4读数头组合测得的位置一致;二是考虑到光栅读数头位移偏移误差是必然存在的,光栅读数头位移偏移误差会对测量模型误差造成影响,为了完整描述工作台的位置变化关系,应考虑光栅读数头位移偏移误差对测量系统造成的影响。
6.在相同的工作台位置处,由位移补偿模型计算的3读数头结果和4读数头结果也会存在不一致性。思考是否可以利用有效区域内不同的3读数头组合与4读数头组合工作台的位置,计算其偏差值进而求得位移补偿模型系数,从而使得3读数头计算的工作台位置与4读数头计算的工作台位置一致,最终达到对光栅读数头位移偏移校准的目的。
(三)
技术实现要素:
7.为了克服上述现有技术中,光栅尺位移测量系统中的读数头的位移偏移误差导致设备精度降低的技术缺陷,本发明提供一种用于光栅读数头位移偏移校准的方法。
8.本发明公开一种用于光栅读数头位移偏移校准的方法,具体包括以下步骤:
9.步骤s1:规划测量路径,设定测量点,在每个测量点都设置工作台姿态z、rx、ry、rz为零。在设定的测量范围内,规划测量路径,设定测量点,设置工作台姿态z、rx、ry、rz为零。
10.步骤s2:执行测量,分别在3读数头和4读数头有效区域内的测量点处进行测量。首先在不同的3读数头有效的测量区域内的测量点处进行测量,然后控制工作台沿设计路径依次从不同的3读头有效的测量区域切换到4读数头有效的测量区域内各个测量点处执行测量,最终在每个测量点处测量得到光栅干涉仪数据。
11.步骤s3:根据测量系统全局模型计算工作台的水平位置。根据测量系统全局模型计算工作台的位置,然后分别将不同的3读数头组合与4读数头组合测得的工作台水平位置做差,获得其水平向位置偏差。
12.步骤s4:建立读数头水平向位移偏差与位移补偿机器常数之间的关联方程。首先根据已经定义的位移几何模型与位移修正模型,将上述得到的工作台水平向位置变化量与读数头水平向位移偏差设定关系,建立相关联系;其次将读数头的位移模型看成各机器常数的函数,并计算得到读数头水平向位移偏差;然后根据相关联系建立了读数头水平向位移偏差与位移补偿机器常数之间的关联方程。
13.步骤s5:求解位移补偿机器常数然后对光栅读数头位移偏移校准。首先将关联方程进行运算,得到所需结果;其次将得到的结果进行简化,用最小二乘法拟合得到待计算的相应补偿机器常数;最后利用上述得到的补偿机器常数重新计算工作台的位置,从而对工作台光栅尺的读数头进行了补偿,达到位移偏移校准的目的。
14.如上所述,本发明一种用于光栅读数头位移偏移校准的方法,具有以下有益结果:
15.本发明能够直接用于光栅干涉仪位移测量系统中光栅读数头位移偏移校准,达到工作台位移测量优化和提高精度的目的。
(四)附图说明
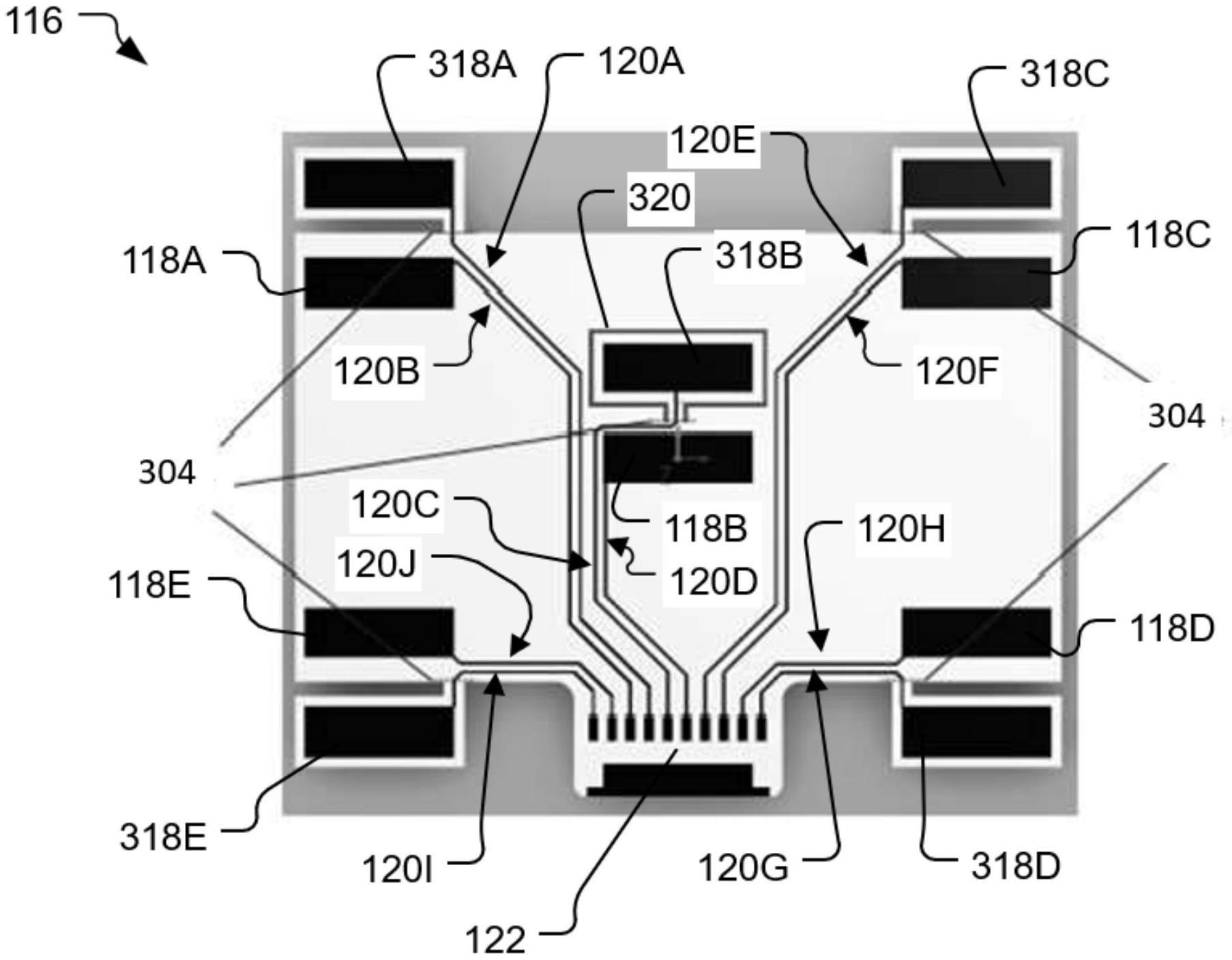
16.图1光栅读数头位移偏移校准方法的测量流程图。
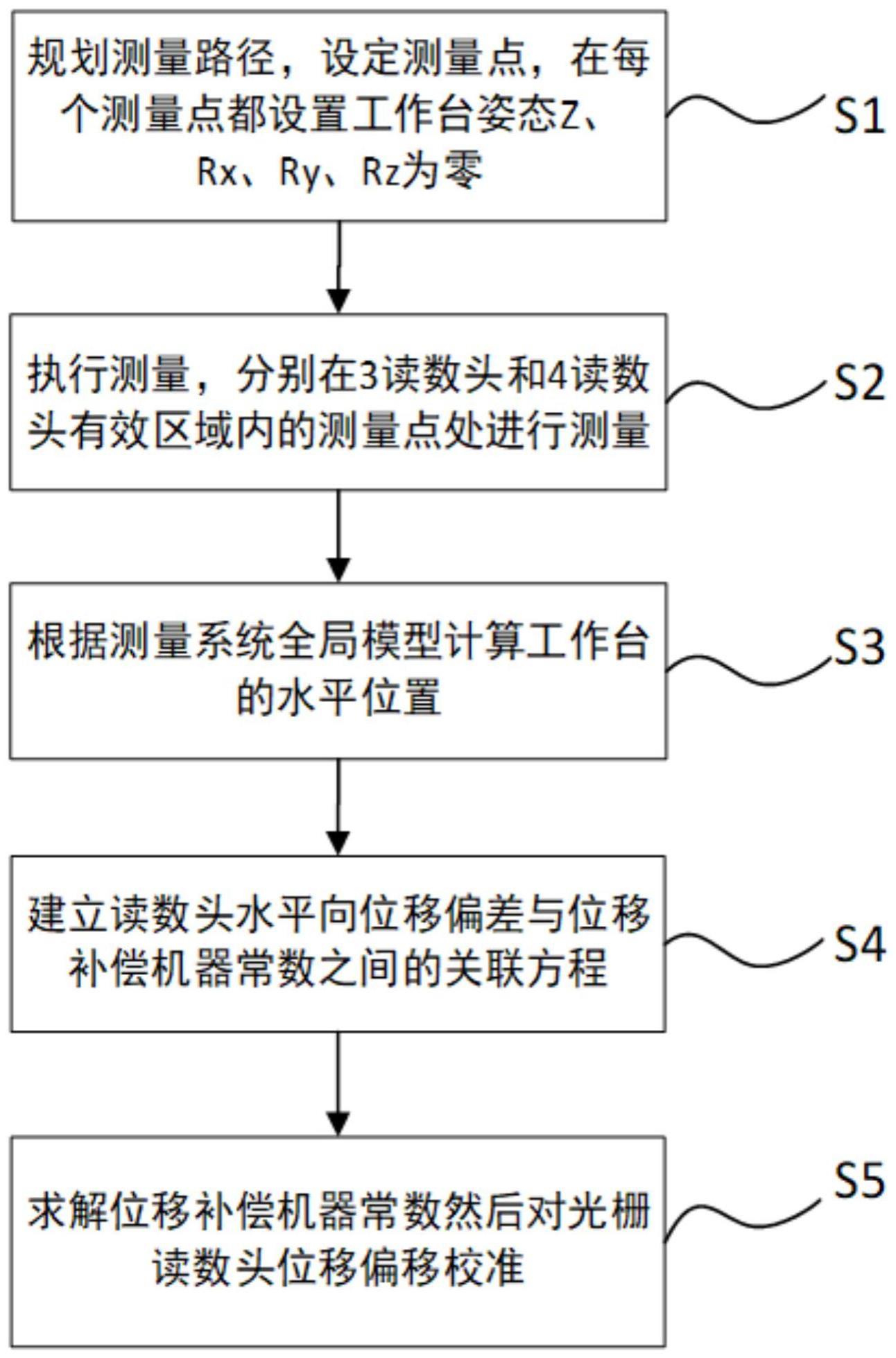
17.图2光栅读数头位移偏移校准的测试路径。
(五)具体实施方式
18.下面结合具体的实施例来进一步阐述本发明。
19.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效。
20.请参阅图1至图2。须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
21.本发明公开一种用于光栅读数头位移偏移校准的方法,可具体分为以下五个步骤:
22.步骤s1:规划测量路径,设定测量点,在每个测量点都设置工作台姿态z、rx、ry、rz为零。在预设的测量范围内,规划测量路径并设定测量点,设置工作台姿态z、rx、ry、rz为零。
23.步骤s2:执行测量,分别在3读数头和4读数头有效区域内的测量点处进行测量。首先获取切换区域边界点位置坐标,在规划的测量范围内按照预设的测量路径设置测量间隔为2mm的测量点,其次在不同的3读数头有效的测量区域内的测量点处进行测量,然后控制工作台沿设计路径依次从不同的3读头有效的测量区域切换到4读数头有效的测量区域内的各个测量点处执行测量,最终在每个测量点处测量得到光栅干涉仪数据,其测试路径规划如图2所示。
24.步骤s3:根据测量系统全局模型计算工作台的水平位置。首先根据测量系统全局模型计算工作台的位置,其次分别将不同的3读数头组合与4读数头组合测得的工作台水平位置作差,获得8组水平向位置偏差表达式如下。
25.步骤s4:建立读数头水平向位移偏差与位移补偿机器常数之间的关联方程。首先根据已定义的位移几何模型与位移修正模型,将上述得到的工作台水平向位置变化量与读数头水平向位移偏差设定关系,建立相关联系,表达式如下:其中,dh
xi
为读数头x向位移偏差;dh
yi
为读数头y向位移偏差;dxi为水平向x位置变化量。dyi为水平向y位置变化量。k为全局模型中计算工作台六自由度时所使用的系数,在这为位移补偿机器常数。其次分别将不同的3读数头组合的位移模型看成各机器常数的函数,对其进行一阶泰勒展开;然后将其分别与4读数头的组合水平向位移做差,整理计算得到读数头间测量结果的偏差,即读数头水平向位移偏差dh
xi
、dh
yi
;最后建立读数头水平向位移偏差与位移补偿机器常数之间的关联方程:
26.步骤s5:求解位移补偿机器常数然后对光栅读数头位移偏移校准。首先将关联方程进行运算,得到所需结果;其次将得到的结果进行简化,用最小二乘法拟合得到待计算的相应补偿机器常数;最后利用上述得到的补偿机器常数重新计算工作台的位置,从而对工作台光栅尺的读数头进行了补偿,达到位移偏移校准的目的。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。