1.本发明涉及基于视觉的振动测量技术领域,具体涉及一种基于线阵视觉和投影条纹的转轴径向振动测量系统和方法。
背景技术:
2.由于旋转机械在制造、装配时不可避免地产生误差,旋转机械工作时常伴随着振动,而在振动信号中蕴含着丰富的机械运转信息。因此,振动测量对于旋转机械的状态监测起着至关重要的作用,借助振动信号诊断机械运行状态是确保结构安全的重要手段之一。旋转结构振动特征能反映出其工作状态,并对潜在的故障风险进行预警。因此,精确的测振技术对于实现旋转机械健康监测具有重要意义。
3.随着计算机科学及图像技术的发展,基于机器视觉的方法在振动测量领域受到了广泛的关注。但是,当前的视觉测量方法中,普遍存在处理流程复杂、测量效率不高、测量振频受限的问题。
技术实现要素:
4.本发明的目的在于提供一种基于线阵视觉和投影条纹的转轴径向振动测量系统和方法,系统结构简单,测量振频范围大,采集数据量小,同时兼具测量效率和精度,为旋转机械转轴的径向振动测量提供了新方法。
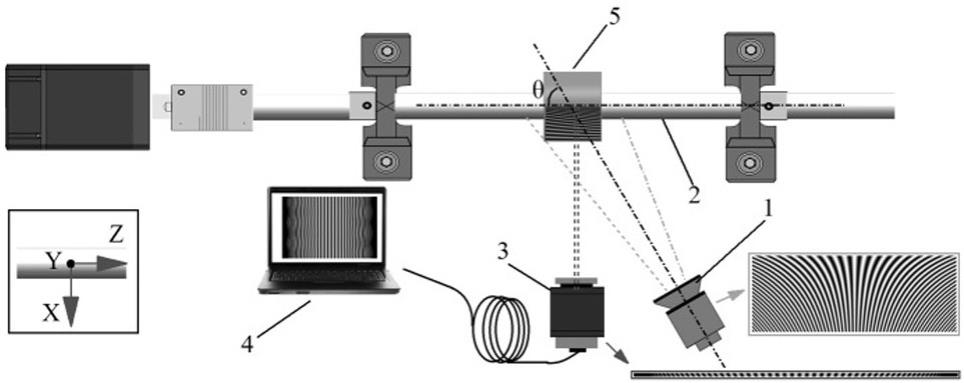
5.为实现上述目的,本发明的技术方案是:一种基于线阵视觉和投影条纹的转轴径向振动测量系统,包括投影灯、线阵相机和图像处理模块;所述投影灯通过预制的灯片产生条纹图案,并将其投影至转轴的配重盘表面;所述线阵相机捕捉受到曲面调制的条纹强度信号,按采集时间顺序将各帧条纹强度信号拼接为二维条纹图像,并传输至图像处理模块;所述图像处理模块基于线阵相机传输信息从条纹变化特征中提取转轴的振动信息,以实现转轴径向振动的位移测量。
6.本发明还提供了一种采用上述所述系统的基于线阵视觉和投影条纹的转轴径向振动测量方法,包括如下步骤:
7.步骤s1、对配重盘表面进行显像处理,以提升条纹的投影质量;调节投影灯的位置及投影方向,将条纹横向投影至测量位置;调整投影灯的镜头焦距,使得投影条纹清晰完整的呈现在配重盘表面;
8.步骤s2、将线阵相机的成像范围设置于转轴的待测位置并固定好相机;根据测量场合的需求,设置好相机包括曝光时间、采集行频的重要参数;调节相机的焦距、光圈和放大倍数,使条纹清晰地成像于线阵相机的线阵传感器中央;
9.步骤s3、将线阵相机所采集的条纹强度信号传输至图像处理模块,利用图像处理算法从条纹特征信息中恢复出待测转轴径向振动信息。
10.在本发明一实施例中,所述步骤s3具体为:
11.步骤s31、以所采集的第一帧条纹强度信号为参考信号,通过重采样算法在固定信
号长度内对参考信号进行线性缩放,以模拟转轴沿水平方向线性位移时所采集的条纹强度信号,再将各行缩放后的条纹信号堆叠为母波条纹图像;
12.步骤s32、将线阵相机所采集的首帧条纹强度信号与母波条纹进行相关系数运算,得到首帧条纹的相关系数曲线;
13.步骤s33、通过峰值搜索算法对相关系数曲线的峰值坐标进行处理,将峰值坐标的定位精度由像素级提升至亚像素级别,再根据坐标与转轴位置间的数学关系式,计算得到转轴沿水平方向上的相对位置;
14.步骤s34、重复步骤s32,计算逐帧条纹强度曲线与母波条纹之间的相关系数曲线;
15.步骤s35、重复步骤s33,通过峰值搜索算法对各帧相关系数曲线的峰值坐标进行处理,获得水平方向上各时刻转轴所处的相对空间位置,以恢复出转轴沿水平方向上的振动位移曲线;
16.步骤s36、选取所采集的首帧条纹强度信号为参考信号,通过自相关运算计算出参考信号的自相关曲线,然后计算参考信号与其余各帧条纹强度之间的互相关曲线;
17.步骤s37、利用峰值搜索算法对各相关曲线的峰值坐标进行准确定位,最后根据数学关系式将峰值坐标的变化转换为转轴沿竖直方向上的振动位移曲线。
18.在本发明一实施例中,所述母波条纹是基于重采样算法生成的,选取首帧条纹信号作为参考并设定条纹放大倍数,首先通过上采样算法将条纹的长度放大至指定倍数得到多组放大条纹,对放大条纹进行处理以模拟实际测量中线性位移下所记录的条纹,最后将经处理后的条纹通过降采样算法恢复为原长度以进行后续相关系数运算。
19.在本发明一实施例中,投影图案为单位长度内频率线性变化的变密度条纹图案,条纹强度的变化方向与转轴轴线垂直。
20.在本发明一实施例中,被测转轴沿水平方向的位移数学关系式为:
[0021][0022]
其中δx(n)为第n帧的转轴沿水平方向的位移,δz(n)为第n帧的转轴沿轴线方向的位移,θ为投影轴与转轴轴线之间的夹角,m
x
为水平方向的真实位移比例因子,和为第n1和n2帧相关系数曲线峰值的像素坐标,δp是第n1帧和第n2帧相关系数曲线峰值坐标之间的像素坐标差。
[0023]
在本发明一实施例中,被测转轴沿竖直方向的位移数学关系式为:
[0024]
δy(n)=myδp'=my(p
y(n)-p
y(1)
)
[0025]
其中δy(n)为第n帧的转轴沿竖直方向的位移,my为竖直方向的真实位移比例因子,p
y(n)
为第n帧条纹与参考条纹的互相关曲线峰值坐标,p
y(1)
为参考条纹的自相关曲线峰值坐标,δp'是自相关曲线与第n帧条纹的互相关曲线峰值坐标之间的像素距离。
[0026]
在本发明一实施例中,所述的峰值搜索算法的数学关系式为:
[0027][0028]
其中,p是由该算法获得的峰值坐标,gi是所处理信号的峰值能量,i表示gi的阶数,g
i j
是代表所处理信号中第(i j)个点幅值的能量,k代表搜索过程中所涉及的点数。
[0029]
相较于现有技术,本发明具有以下有益效果:本发明系统结构简单,测量振频范围
大,采集数据量小,同时兼具测量效率和精度,为旋转机械转轴的径向振动测量提供了新方法。
附图说明
[0030]
图1是本发明实施例的装置结构示意图;
[0031]
图2是本发明实施例计算结构沿水平方向位移的原理图。其中(a)为由线阵相机所采集的各帧条纹强度信号;(b)为由参考条纹信号生成的母波条纹;(c)为(a)中红色和蓝色虚线所示的条纹强度和与母波条纹的相关系数曲线;(d)为由各帧相关系数曲线组成的相关系数曲线集;(e)为转轴沿水平方向测得的位移曲线;
[0032]
图3是本发明实施例计算结构沿竖直方向位移的原理图;其中(a)为由线阵相机所采集的各帧条纹强度信号;(b)为参考条纹强度与其余各帧条纹强度间的相关曲线集;(c)为图(b)相关曲线集的空间三维图;(d)为图(b)中红色虚线和蓝色虚线处的互相关曲线;(e)为转轴沿竖直方向测得的位移曲线。
[0033]
图中,1-投影灯、2-转轴、3-线阵相机、4-计算机、5-配重盘。
具体实施方式
[0034]
下面结合附图,对本发明的技术方案进行具体说明。
[0035]
请参照图1,本发明提供一种基于线阵视觉和投影条纹的转轴径向振动测量系统和方法,包括1、投影灯2、转轴3、线阵相机4、计算机5、配重盘。投影灯1投射条纹图案于配重盘5的表面,线阵相机3对配重盘5的表面的条纹进行连续成像和捕捉,传输至计算机4进行保存和处理。由计算机内的图像处理模块对所捕捉的条纹强度信号进行处理以获取转轴径向振动信息。
[0036]
在本实施例中,参考图2,为计算结构沿水平方向位移的原理图。如图2所示,当被测转轴在水平方向上有位移δx时,图中(c)中的相关系数曲线峰值坐标将产生变化,再借助峰值搜索算法精准定位峰值坐标,由各帧条纹信号相关系数曲线峰值坐标的变化即可求得转轴2沿水平方向的振动信号。转轴2沿水平方向的位移数学计算式为:
[0037][0038]
其中δx(n)为第n帧的转轴沿水平方向的位移,δz(n)为第n帧的转轴沿轴线方向的位移,θ为投影轴与转轴轴线之间的夹角,m
x
为水平方向的真实位移比例因子,和为第n1和n2帧相关系数曲线峰值的像素坐标,δp是第n1帧和第n2帧相关系数曲线峰值坐标之间的像素坐标差。
[0039]
在本实施例中,参考图3,为计算转轴沿竖直方向位移的原理图。如图3所示,当被测转轴在竖直方向上有位移δy时,图中(d)中所示的互相关曲线的峰值坐标会发生改变,首先提取各帧峰值坐标,再利用峰值搜索算法对峰值坐标进行校正,即可求得转轴2沿竖直方向上的振动信号。转轴2沿竖直方向的位移数学计算式为:
[0040]
δy(n)=myδp'=my(p
y(n)-p
y(1)
)
[0041]
其中δy(n)为第n帧的转轴沿竖直方向的位移,my为竖直方向的真实位移比例因子,p
y(n)
为第n帧条纹与参考条纹的互相关曲线峰值坐标,p
y(1)
为参考条纹的自相关曲线峰
值坐标,δp'是自相关曲线与第n帧条纹的互相关曲线峰值坐标之间的像素距离。
[0042]
以上是本发明的较佳实施例,凡依本发明技术方案所作的改变,所产生的功能作用未超出本发明技术方案的范围时,均属于本发明的保护范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。