技术特征:
1.一种配置为处理患者骨的超声图像的手术系统,该超声图像包括每个所述患者骨的骨表面,该系统包括:计算设备,其包括处理设备和其上存储有一个或多个可执行指令的计算机可读介质,所述处理设备被配置为执行所述一个或多个可执行指令,所述一个或多个可执行指令i)检测所述超声图像中的每个所述患者骨的骨表面;以及ii)分离与每个所述患者骨的骨表面相关联的超声图像像素的第一点云。2.如权利要求1所述的系统,其中,所述骨表面的检测通过形成所述一个或多个可执行指令的至少一部分的图像处理算法发生。3.如权利要求2所述的系统,其中,所述图像处理算法包括机器学习模型。4.如权利要求2所述的系统,其中,分离所述第一点云通过形成所述一个或多个可执行指令的至少一部分的像素分类神经网络发生。5.如权利要求2所述的系统,其中,分离所述第一点云通过形成所述一个或多个可执行指令的至少一部分的基于图像的分类神经网络发生。6.如权利要求1所述的系统,其中,所述处理设备执行所述一个或多个可执行指令以计算所述第一点云到分离的3d点云的变换,所述分离的3d点云被分离使得所述分离的3d点云的所述超声图像像素各自与所述患者骨的相应骨表面相关。7.如权利要求6所述的系统,其中,在计算所述第一点云到所述分离的3d点云的变换时,针对超声探头跟踪器校准所述超声图像像素并且针对跟踪相机校准所述超声探头跟踪器。8.如权利要求7所述的系统,其中,在针对所述超声探头跟踪器校准所述超声图像像素时,考虑超声波在特定介质中的传播速度。9.如权利要求6所述的系统,其中,在计算所述第一点云到所述分离的3d点云的变换时,针对超声探头跟踪器校准所述超声图像像素,针对跟踪相机校准超声探头跟踪器,并且坐标系是经由位于所述患者骨的骨表面上的解剖结构跟踪器相对于所述骨表面的。10.如权利要求6所述的系统,其中,分离所述第一点云通过对所述第一点云的几何分析发生。11.如权利要求6所述的系统,其中,所述一个或多个可执行指令计算从所述患者骨取得的第二点云到所述患者骨的骨模型的初始或粗略配准。12.如权利要求11所述的系统,其中,所述第二点云包括相对于所述患者骨上的多个跟踪器的多个点云。13.如权利要求12所述的系统,其中,所述多个点云包括与所述患者骨的骨模型中的一个骨模型配准的一个点云和与所述患者骨的骨模型中的另一个骨模型配准的另一个点云。14.如权利要求11所述的系统,其中,所述初始或粗略配准是基于界标的。15.如权利要求11所述的系统,其中,所述初始或粗略配准是根据解剖结构跟踪器的位置和取向计算的。16.如权利要求11所述的系统,其中,在计算所述初始或粗略配准时,由所述系统生成第三点云和第四点云,所述第三点云是所述患者骨中的第一骨相对于与所述第一骨相关联的第一跟踪器的点云,所述第四点云是所述患者骨中的第二骨相对于与所述第二骨相关联的第二跟踪器的点云。
17.如权利要求16所述的系统,其中,在计算所述初始或粗略配准时,所述系统将所述第三点云的骨表面点匹配到所述第一骨的计算机模型上,并将所述第四点云的骨表面点匹配到所述第二骨的计算机模型上。18.如权利要求11所述的系统,其中,所述处理设备执行所述一个或多个指令以使用所述初始或粗略配准和所述分离的3d点云来计算最终多重骨配准,其中所述最终多重骨配准实现所述分离的3d点云与所述患者骨之间的最终配准。19.如权利要求18所述的系统,其中,在计算其中在分类的3d骨表面点云与所述患者骨之间存在所述最终配准的所述最终多重骨配准时,所述系统迭代地细化所述分离的3d点云到所述患者骨的计算机模型的配准,并迭代地细化所述分离的3d点云的分离。20.一种处理患者骨的超声图像的方法,该超声图像包括每个所述患者骨的骨表面,该方法包括:检测所述超声图像中的每个所述患者骨的骨表面;以及分离与每个所述患者骨的骨表面相关联的超声图像像素的第一点云。21.如权利要求20所述的方法,其中,所述骨表面的检测通过图像处理算法发生。22.如权利要求21所述的方法,其中,所述图像处理算法包括机器学习模型。23.如权利要求21所述的方法,其中,分离所述第一点云通过像素分类神经网络发生。24.如权利要求21所述的方法,其中,分离所述第一点云通过基于图像的分类神经网络发生。25.如权利要求20所述的方法,还包括:计算所述第一点云到分离的3d点云的变换,所述分离的3d点云被分离使得所述分离的3d点云的超声图像像素各自与患者骨的相应骨表面相关。26.如权利要求25所述的方法,其中,在计算所述第一点云到所述分离的3d点云的变换时,针对超声探头跟踪器校准所述超声图像像素并且针对跟踪相机校准所述超声探头跟踪器。27.如权利要求26所述的方法,其中,在针对所述超声探头跟踪器校准所述超声图像像素时,考虑超声波在特定介质中的传播速度。28.如权利要求25所述的方法,其中,在计算所述第一点云到所述分离的3d点云的变换时,针对超声探头跟踪器校准所述超声图像像素,针对跟踪相机校准所述超声探头跟踪器,并且坐标系是经由位于所述患者骨的骨表面上的解剖结构跟踪器相对于所述骨表面的。29.如权利要求25所述的方法,其中,分离所述第一点云通过对所述第一点云的几何分析发生。30.如权利要求25所述的方法,还包括计算从所述患者骨取得的第二点云到所述患者骨的骨模型的初始或粗略配准。31.如权利要求30所述的方法,其中,所述第二点云包括相对于所述患者骨上的多个跟踪器的多个点云。32.如权利要求31所述的方法,其中,所述多个点云包括与所述患者骨的骨模型中的一个骨模型配准的一个点云和与所述患者骨的所述骨模型的另一个骨模型配准的另一个点云。33.如权利要求30所述的方法,其中,所述初始或粗略配准是基于界标的。
34.如权利要求30所述的方法,其中,根据解剖结构跟踪器的位置和取向来计算所述初始或粗略配准。35.如权利要求30所述的方法,其中,在计算所述初始或粗略配准时,生成第三点云和第四点云,所述第三点云是所述患者骨中的第一骨相对于与所述第一骨相关联的第一跟踪器的点云,所述第四点云是所述患者骨中的第二骨相对于与所述第二骨相关联的第二跟踪器的点云。36.如权利要求35所述的方法,其中,在计算所述初始或粗略配准时,将所述第三点云的骨表面点匹配到所述第一骨的计算机模型上,并将所述第四点云的骨表面点匹配到所述第二骨的计算机模型上。37.如权利要求30所述的方法,还包括:使用所述初始或粗略配准和所述分离的3d点云来计算最终多重骨配准,其中所述最终多重骨配准实现所述分离的3d点云与所述患者骨之间的最终配准。38.如权利要求37所述的方法,其中,在计算其中在所述分类的3d骨表面点云与所述患者骨之间存在所述最终配准的所述最终多重骨配准时,迭代地细化所述分离的3d点云到所述患者骨的计算机模型的配准,并且迭代地细化所述分离的3d点云的分离。
技术总结
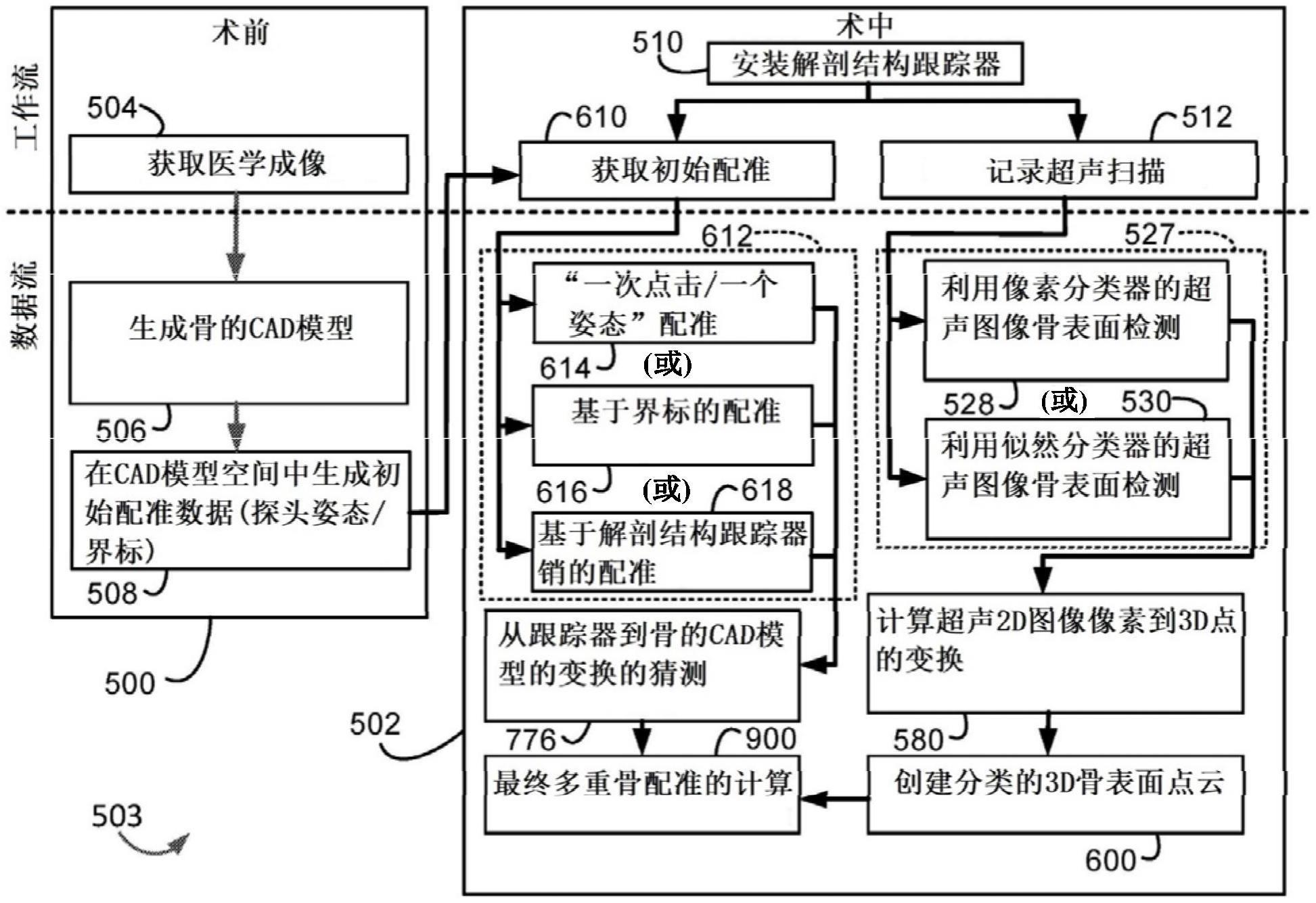
本文公开了一种用于将患者骨与手术计划进行手术配准的手术系统。作为其执行手术配准能力的一部分,该系统被配置为处理患者骨的超声图像,该超声图像包括每个患者骨的骨表面。该系统包括计算设备,该计算设备包括处理设备和其上存储有一个或多个可执行指令的计算机可读介质。处理设备被配置为执行该一个或多个可执行指令。该一个或多个可执行指令:i)检测超声图像中每个患者骨的骨表面;以及ii)分离与每个患者骨的骨表面相关联的超声图像像素的第一点云。的第一点云。的第一点云。
技术研发人员:P
受保护的技术使用者:马科外科公司
技术研发日:2021.10.26
技术公布日:2023/8/4
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。