1.本发明涉及行驶车系统。
背景技术:
2.已知一种具备格子状的轨道、和在轨道上行驶的行驶车的行驶车系统(例如参见专利文献1)。在专利文献1所记载的行驶车系统中,行驶车具备在轨道的上侧行驶的行驶部、位于轨道的下方的主体部、和连结行驶部与主体部的连结部。另外,轨道具备沿着第一方向设置的多条第一轨道、沿着与第一方向正交的第二方向设置的多条第二轨道、和在第一轨道的延长线与第二轨道的延长线交叉的部分设置的部分轨道。在第一轨道与部分轨道之间以及第二轨道与部分轨道之间,形成有当行驶车行驶时供连结部通过的间隙。行驶部通过使在轨道上行驶的四个车轮分别绕着上下方向的旋转轴旋转,能够将行驶车的行驶方向切换成第一方向和第二方向。
3.现有技术文献
4.专利文献
5.专利文献1:国际公布第wo2017/150005号
技术实现要素:
6.在专利文献1所记载的行驶车系统中,在行驶部中,由于行驶方向上的左右的车轮在行驶方向上没有错开,所以当行驶部从间隙通过时,左右的车轮会同时从间隙通过。当车轮从间隙通过时,在左右同时向行驶车传递振动,向行驶车传递的振动会变大。
7.本发明的目的在于,提供一种能够抑制向行驶车传递的振动的行驶车系统。
8.在本发明的方式中提供一种行驶车系统。行驶车系统具备轨道和在轨道上行驶的行驶车,在该行驶车系统中,轨道具备沿着第一方向设置的多条第一轨道、沿着与第一方向正交的第二方向设置的多条第二轨道、和在第一轨道的延长线与第二轨道的延长线交叉的部分设置的部分轨道,行驶车具备在轨道的上侧行驶的行驶部、位于轨道的下方的主体部、和将行驶部与主体部连结的连结部,在第一轨道与部分轨道之间以及第二轨道与部分轨道之间,形成有当行驶车行驶时供连结部通过的间隙,行驶部具备在轨道上行驶的四个车轮、和方向转换机构,该方向转换机构通过使车轮分别绕着与四个车轮的各车轴正交的四个旋转轴旋转而将行驶车的行驶方向切换成第一方向和第二方向,在俯视时以四个旋转轴为顶点而形成的四边形的任何一条边都不与第一轨道及第二轨道平行。
9.发明效果
10.根据上述行驶车系统,行驶方向上的左右的车轮成为在行驶方向上错开的状态。因此,无论在行驶车在第一轨道及第二轨道中的哪一轨道上行驶的情况下,左右的车轮进入间隙的时机均不同。此外,左右的车轮从间隙通过时所需的时间有时会有一部分重复,有时也会完全错开。其结果是,由于能够防止车轮从间隙通过时产生的振动及噪音在左右的车轮同时产生,所以能够抑制向行驶车传递的振动增加而实现顺畅的行驶,同时能够抑制
向周围传递的噪音变大。
11.也可以是,四边形在俯视时为菱形。根据该结构,由于构成行驶部的车轮等零件的对称性高,所以容易制造,能够确保行驶车的重量平衡。
12.也可以是,四个车轮设于到各自对应的旋转轴的长度相等的位置。也可以是,与菱形的锐角的顶点相当的旋转轴所对应的车轮在俯视时与旋转轴相比设于行驶车的内侧。也可以是,与菱形的钝角的顶点相当的旋转轴所对应的车轮在俯视时与旋转轴相比设于行驶车的外侧。根据该结构,无论在行驶车在第一方向及第二方向中的哪一方向上行驶的情况下,行驶方向上的前后的车轮均大致对齐成一条直线,因此能够缩小行驶轮在轨道上通过的区域。另外,根据该结构,能够使四个车轮绕着旋转轴旋转时的磨损均匀化。
13.也可以是,与位于菱形的第一对角的顶点上的两个旋转轴对应的两个车轮与各自对应的旋转轴相距第一距离。也可以是,与位于菱形的不同于第一对角的第二对角的顶点上的两个旋转轴对应的两个车轮与各自对应的旋转轴相距不同于第一距离的第二距离。也可以是,行驶方向上的前后的车轮大致排列在直线上。根据该结构,无论在行驶车在第一方向及第二方向中的哪一方向上行驶的情况下,行驶方向上的前后的车轮均大致对齐成一条直线,因此能够缩小行驶轮在轨道上通过的区域。
14.也可以是,轨道由第一轨道和第二轨道形成为格子状。也可以是,主体部在俯视时设为收于格子状的轨道中的一格内。根据该结构,在多台行驶车在格子状的轨道上行驶的情况下,即使行驶车分别位于相邻的格内,也能防止行驶车彼此干扰。
附图说明
15.图1表示第一实施方式的行驶车系统的一例。
16.图2表示第一实施方式的行驶车系统的一例。
17.图3表示利用相对于行驶方向正交的平面剖切行驶车而得到的剖面的一例。
18.图4表示行驶车将行驶方向从第一方向变更为第二方向的动作的一例。
19.图5表示行驶车将行驶方向从第一方向变更为第二方向的动作的一例。
20.图6表示行驶车将行驶方向从第一方向变更为第二方向的动作的一例。
21.图7表示行驶车将行驶方向从第一方向变更为第二方向的动作的一例。
22.图8表示上部单元的其他例子。
23.图9表示在行驶车系统中两台行驶车相邻时的一例。
24.图10示意性表示第二实施方式的行驶车系统中的行驶车的一例。
25.图11表示行驶车将行驶方向从第一方向变更为第二方向的动作的一例。
26.图12表示行驶车将行驶方向从第一方向变更为第二方向的动作的一例。
27.图13示意性表示第三实施方式的行驶车系统中的行驶车的一例。
28.图14表示行驶车将行驶方向从第一方向变更为第二方向的动作的一例。
29.图15表示行驶车将行驶方向从第一方向变更为第二方向的动作的一例。
具体实施方式
30.以下,通过本发明的实施方式来说明本发明,但以下的实施方式并不限定权利要求书的方案。另外,在附图中,有时为了说明实施方式而将一部分以放大或强调的方式记载
等、通过适当变更比例尺来表达,尺寸、外形与实际产品不同。在以下各图中,有时使用xyz正交坐标系来说明图中的方向。在该xyz坐标系中,将平行于水平面的平面作为xy平面。在本实施方式中,将x方向作为第一方向d1,将y方向作为第二方向d2。另外,将垂直于xy平面的上下方向记载为z方向。x方向、y方向及z方向分别以图中箭头所指方向为 方向、以与箭头所指方向相反的方向为-方向来进行说明。
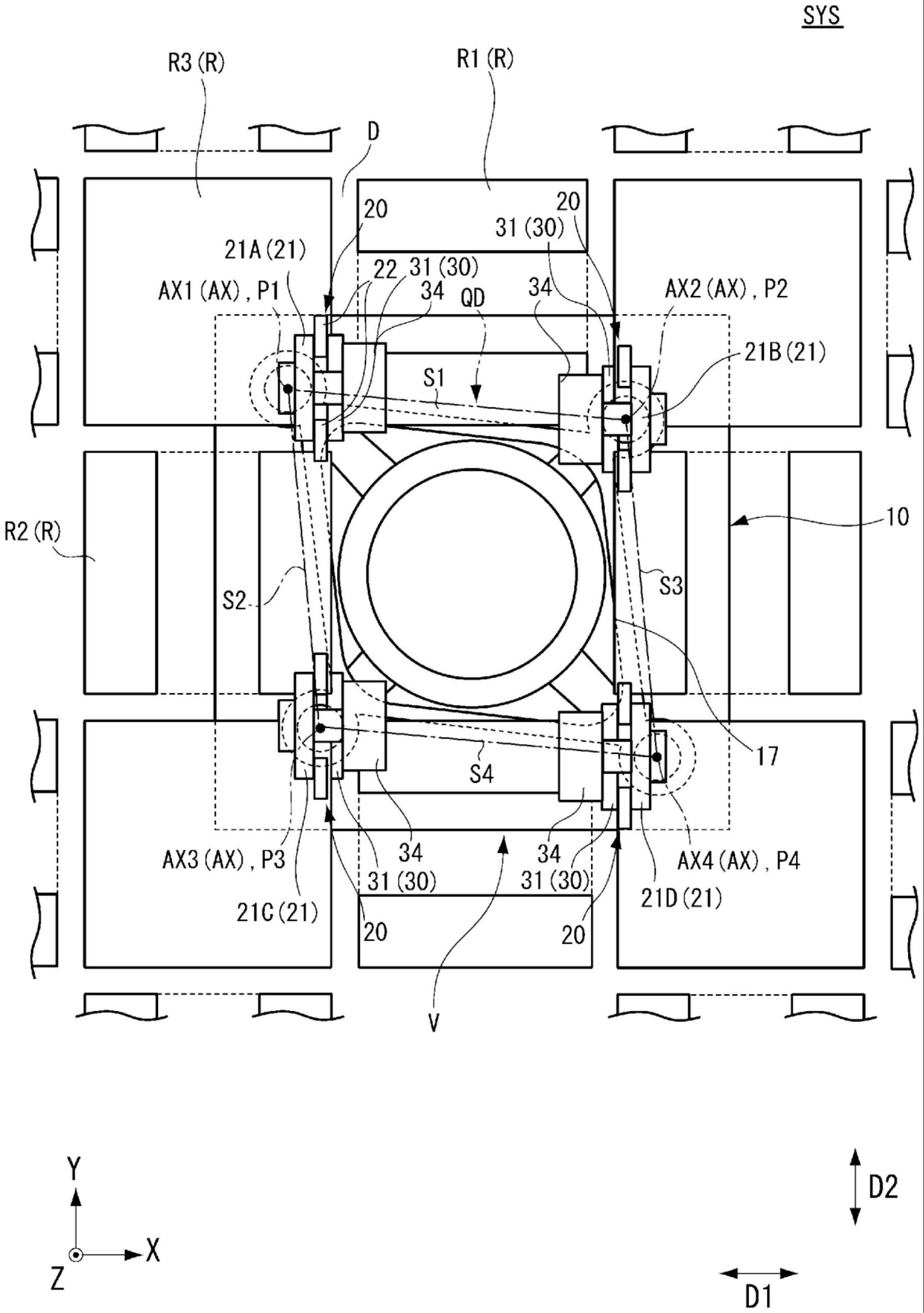
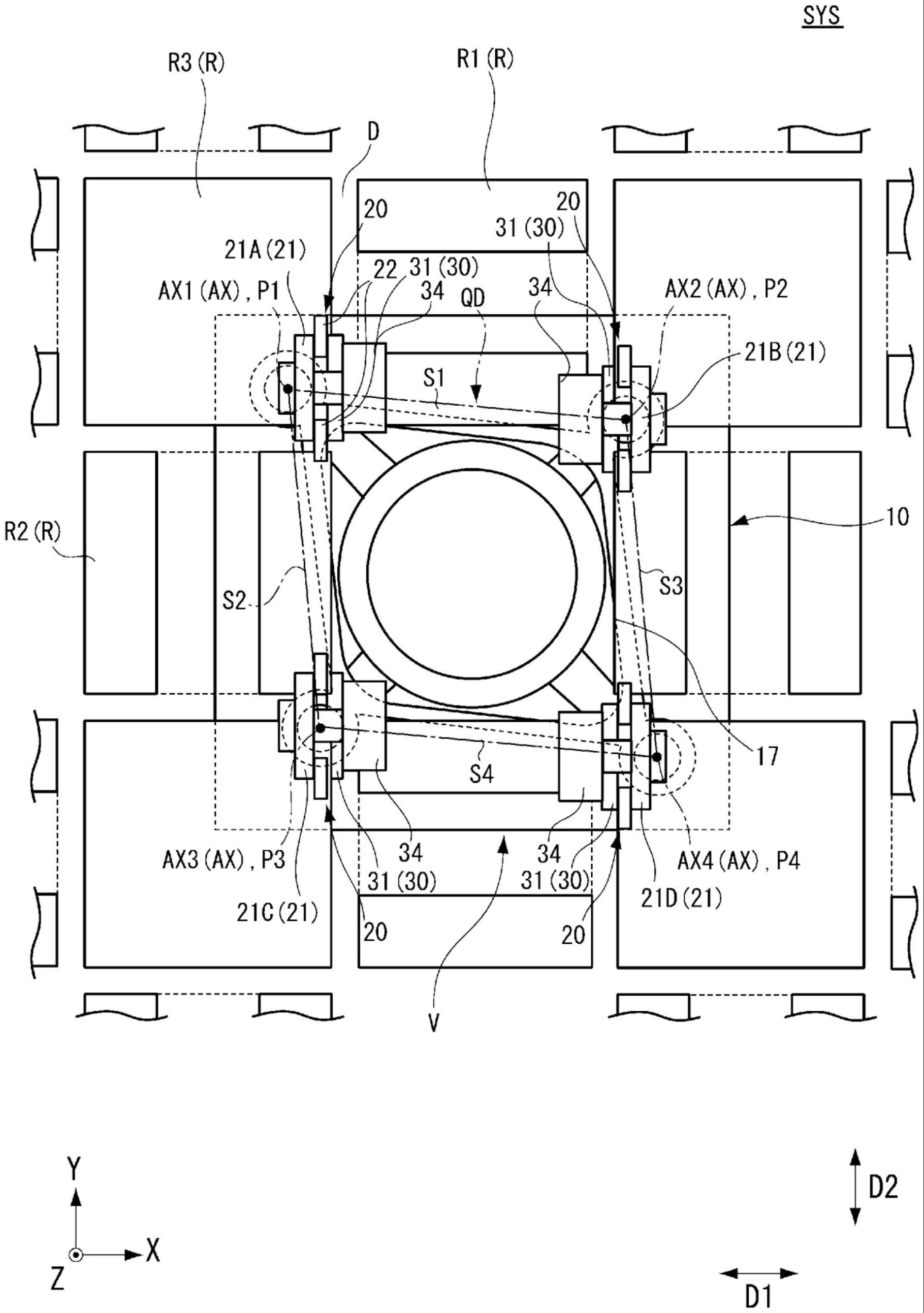
31.图1及图2表示第一实施方式的行驶车系统sys的一例。图3表示利用相对于行驶方向t正交的平面剖切行驶车v而得到的剖面的一例。行驶车系统sys是设于半导体器件的制造工厂等中、并搬送容纳有标线片等的标线片盒、容纳有用于制造半导体器件的半导体晶圆的foup等物品的系统。行驶车系统sys能够应用于半导体制造领域以外的设备。物品也可以是能够由行驶车系统sys保管的其他物品。
32.行驶车系统sys具备轨道r和行驶车v。轨道r是具有第一轨道r1、第二轨道r2和部分轨道r3的格子状轨道。第一轨道r1沿着第一方向d1延伸。第二轨道r2沿着第二方向d2延伸。在本实施方式中,第一方向d1与第二方向d2正交,多条第一轨道r1与多条第二轨道r2沿着相互正交的方向设置,但设为并不直接相互交叉。部分轨道r3配置在第一轨道r1的延长战与第二轨道r2的延长战交叉的部分。部分轨道r3相对于第一轨道r1在第一方向d1上相邻,并相对于第二轨道r2在第二方向d2上相邻。部分轨道r3将第一轨道r1与第二轨道r2连接。轨道r通过将第一轨道r1和第二轨道r2沿正交的方向设置而在俯视时成为多个网格单元c相邻的状态。一个网格单元c是在俯视时由在第二方向d2上相邻的两条第一轨道r1和在第一方向d1上相邻的两条第二轨道r2围成的部分。此外,轨道r在第一方向d1及第二方向d2上连续形成有同样的结构。
33.第一轨道r1、第二轨道r2及部分轨道r3由悬挂部件h悬挂在顶棚上。悬挂部件h具有用于悬挂第一轨道r1的第一部分h1、用于悬挂第二轨道r2的第二部分h2、和用于悬挂部分轨道r3的第三部分h3。第一部分h1及第二部分h2分别设于隔着第三部分h3的两处。
34.第一轨道r1具有供行驶车v行驶的行驶面r1a。第二轨道r2具有供行驶车v行驶的行驶面r2a。部分轨道r3具有供行驶车v行驶的行驶面r3a。在第一轨道r1与部分轨道r3之间和第二轨道r2与部分轨道r3之间分别形成有间隙d。间隙d是当行驶车v在第一轨道r1上行驶并横穿第二轨道r2时、或在第二轨道r2上行驶并横穿第一轨道r1时供作为行驶车v的一部分的连结部30通过的部分。因此,间隙d设为连结部30能够通过的宽度。第一轨道r1、第二轨道r2及部分轨道r3沿着相同或大致相同的水平面设置。在本实施方式中,在第一轨道r1、第二轨道r2及部分轨道r3中,行驶面r1a、r2a、r3a配置在相同或大致相同的水平面上。
35.行驶车v具有主体部10、行驶部20和连结部30。主体部10配置在轨道r的下方。主体部10在俯视时例如形成为矩形。主体部10形成为在俯视时收于轨道r中的一个网格单元c内的尺寸。因此,能够确保与在相邻的第一轨道r1或第二轨道r2上行驶的其他行驶车v交错的空间。主体部10具备上部单元17和移载装置18。上部单元17借助连结部30从行驶部20悬挂。上部单元17是具有四个角部、且中央部被挖穿的框架状单元。移载装置18设于上部单元17的下方。移载装置18能够绕着z方向旋转。
36.行驶部20具有车轮21和辅助车轮22。车轮21分别配置在上部单元17的四个角部。车轮21分别安装在设于连结部30的车轴上。车轴沿着xy平面平行或大致平行地设置。车轮21分别在轨道r中的第一轨道r1的行驶面r1a、第二轨道r2的行驶面r2a及部分轨道r3的行
驶面r3a滚动,以使行驶车v行驶。
37.车轮21设为能够以旋转轴ax为中心在θz方向上旋转。车轮21通过方向转换机构34而在θz方向上旋转,其结果是,能够变更行驶车v的行驶方向t。辅助车轮22分别在车轮21的行驶方向t的前后各配置一个。辅助车轮22分别与车轮21同样地能够绕着沿xy平面平行或大致平行的车轴旋转。辅助车轮22的下端设定为比车轮21的下端高。因此,当车轮21在行驶面r1a、r2a、r3a上行驶时,辅助车轮22不与行驶面r1a、r2a、r3a接触。另外,当车轮21从间隙d通过时,辅助车轮22与行驶面r1a、r2a、r3a接触,以抑制车轮21陷落。需要说明的是,并不限定于针对一个车轮21设置两个辅助车轮22,例如也可以针对一个车轮21设置一个辅助车轮22,还可以不设置辅助车轮22。
38.连结部30将主体部10的上部单元17与行驶部20连结。连结部30分别设于上部单元17的四个角部。主体部10通过该连结部30而成为从行驶部20悬挂的状态,与轨道r相比配置在下方。连结部30具有支承部件31和连接部件32。支承部件31将车轮21的车轴及辅助车轮22的车轴以能够旋转的方式支承。通过支承部件31保持车轮21与辅助车轮22的相对位置。支承部件31例如形成为板状,并形成为能够从间隙d通过的厚度。
39.连接部件32从支承部件31向下方延伸并与上部单元17连结,保持上部单元17。连接部件32设为能够以旋转轴ax为中心在θz方向上旋转。通过该连接部件32以旋转轴ax为中心旋转,能够借助支承部件31使车轮21在绕着旋转轴ax的θz方向上旋转。
40.在连结部30上设有方向转换机构34。方向转换机构34通过使连结部30的连接部件32以旋转轴ax为中心旋转而使车轮21在绕着旋转轴ax的θz方向上旋转。通过使车轮21在θz方向上旋转,能够从将行驶车v的行驶方向t设为第一方向d1的第一状态切换成将行驶方向t设为第二方向d2的第二状态。另外,通过使车轮21在θz方向上旋转,能够从将行驶方向t设为第二方向d2的第二状态切换成将行驶方向t设为第一方向d1的第一状态。
41.通过方向转换机构34的旋转,配置在上部单元17的四个角部的车轮21及辅助车轮22分别以旋转轴ax为中心在θz方向上且在90度的范围内旋转。方向转换机构34的驱动由车载控制器控制。车载控制器既可以指示在相同的时机进行四个车轮21的旋转动作,也可以指示在不同的时机进行四个车轮21的旋转动作。通过使车轮21及辅助车轮22旋转,从车轮21的车轴的方向被设为第一方向d1及第二方向d2中的一方的状态转移到被设为另一方的状态。因此,能够在将行驶车v的行驶方向t设为第一方向d1的第一状态与将行驶方向t设为第二方向d2的第二状态之间进行切换。
42.在此,考虑在俯视时以四个旋转轴ax为顶点p1~p4的四边形qd。四边形qd具有四个顶点p1~p4及四条边s1~s4。四边形qd以任何一条边s1~s4都不与第一轨道r1及第二轨道r2平行的状态配置。在该结构中,四个车轮21以行驶方向t上的左右的两个车轮21在行驶方向t上错开的状态配置。
43.在本实施方式中,四边形qd在俯视时为菱形。在该情况下,由于构成行驶部20的车轮21等零件的对称性高,所以容易制造,能够确保行驶车v的重量平衡。
44.与菱形的锐角的顶点p1、p4相当的旋转轴ax1、ax4所对应的车轮21a、21d在俯视时与旋转轴ax1、ax4相比设于行驶车v的内侧。与菱形的钝角的顶点p2、p3相当的旋转轴ax2、ax3所对应的车轮21b、21c在俯视时与旋转轴ax2、ax3相比设于行驶车v的外侧。四个车轮21设于到各自对应的旋转轴ax的长度相等的位置。由于四个车轮21绕着旋转轴ax旋转时的旋
转半径相等,所以能够使车轮21的磨损在四个车轮21中均匀化。
45.在图3中,列举与顶点p1、p2对应的车轮21作为示例。相对于行驶方向t位于左右方向上的车轮21a、21b相对于俯视时的行驶车v的中心轴o配置为相等的距离l1。另外,从与菱形的锐角的顶点p1相当的旋转轴ax1到车轮21a的长度、以及从与菱形的钝角的顶点p2相当的旋转轴ax2到车轮21b的长度是相等的距离l2。
46.图4至图7表示行驶车v将行驶方向t从第一方向d1变更为第二方向d2的情况下的动作的一例。在行驶方向t为第一方向d1的情况下、即在行驶车v在第一轨道r1上行驶的情况下,车轮21a和车轮21c排列在行驶方向t上的左右,车轮21b和车轮21d排列在行驶方向t上的左右。行驶方向t上的左右的两个车轮21a、21c以在行驶方向t上错开距离l3的状态配置。另外,行驶方向t上的左右的两个车轮21b、21d以在行驶方向t上错开距离l3的状态配置。因此,在行驶车v在第一轨道r1上行驶的情况下,左右的车轮21a、21c在不同的时机从间隙d通过,左右的车轮21b、21d在不同的时机从间隙d通过。其结果是,能够防止四个车轮21从间隙d通过时产生的振动及噪音在左右的车轮21同时产生,因此能够抑制向行驶车v传递的振动增加。另外,四个车轮21以行驶方向t上的前后的车轮21a、21b大致对齐成一条直线的状态配置,同样地以行驶方向t上的前后的车轮21c、21d大致对齐成一条直线的状态配置,因此,能够缩小车轮21在轨道r上通过的区域。
47.在行驶方向t为第二方向d2的情况下、即在行驶车v在第二轨道r2上行驶的情况下,车轮21a和车轮21b排列在行驶方向t上的左右,车轮21c和车轮21d排列在行驶方向t上的左右。行驶方向t上的左右的两个车轮21a、21b以在行驶方向t上错开距离l3的状态配置。另外,行驶方向t上的左右的两个车轮21c、21d以在行驶方向t上错开距离l3的状态配置。因此,在行驶车v在第二轨道r2上行驶的情况下,左右的车轮21a、21b在不同的时机从间隙d通过,左右的车轮21c、21d在不同的时机从间隙d通过。其结果是,即使在第二轨道r2上行驶的情况下,也能够防止四个车轮21从间隙d通过时产生的振动及噪音在左右的车轮21同时产生,从而能够抑制向行驶车v传递的振动增加。另外,四个车轮21以行驶方向t上的前后的车轮21a、21c大致对齐成一条直线的状态配置,同样地以行驶方向t上的前后的车轮21b、21d大致对齐成一条直线的状态配置,因此,能够缩小车轮21在轨道r上通过的区域。
48.图8表示上部单元17的其他例子。上部单元17a例如也可以是在俯视时形成为菱形、且中央部未被挖穿的板状结构。在该情况下,上部单元17a在俯视时成为内包四边形qd的结构,成为不易变形的结构。
49.图9表示在行驶车系统sys中两台行驶车v相邻时的一例。主体部10在俯视时设为收于格子状的轨道r中的成为一格的一个网格单元c内。在该结构中,在多台行驶车v在格子状的轨道r上行驶的情况下,即使行驶车v分别位于相邻的网格单元c,也能够防止行驶车v彼此干扰。
50.如以上说明的那样,本实施方式的行驶车系统sys中,行驶方向t上的左右的车轮21成为在行驶方向t上错开的状态。因此,无论在行驶车v在第一轨道r1及第二轨道r2中的哪一轨道上行驶的情况下,左右的车轮21均在不同的时机从间隙d通过。其结果是,由于能够防止车轮21从间隙d通过时产生的振动及噪音在左右的车轮21同时产生,所以能够抑制向行驶车v传递的振动增加而实现顺畅的行驶,同时能够抑制向周围传递的噪音。
51.对第二实施方式进行说明。在本实施方式中,对与上述实施方式相同的结构标注
相同的附图标记,并适当省略或简化其说明。另外,在本说明书的实施方式中说明的事项中的、能够应用于本实施方式的结构也适当在本实施方式中应用。
52.图10至图12是示意性表示第二实施方式的行驶车系统sys2中的行驶车v2的一例的俯视图,表示行驶车v2将行驶方向t从第一方向d1变更为第二方向d2的动作的一例。
53.本实施方式中的四边形qd2例如在俯视时为菱形,具有四个顶点p5~p8及四条边s5~s8。四边形qd2以任何一条边s5~s8都不与第一轨道r1及第二轨道r2平行的状态配置。在该结构中,四个车轮21以行驶方向t上的左右的两个车轮21在行驶方向t上错开距离l6的状态配置。
54.在四边形qd2中,与位于菱形的第一对角α1的顶点p5、p8上的两个旋转轴ax5、ax8对应的两个车轮21a、21d与各自对应的旋转轴ax5、ax8相距第一距离l4。在四边形qd2中,与位于菱形的第二对角α2的顶点p6、p7上的两个旋转轴ax6、ax7对应的两个车轮21b、21c与各自对应的旋转轴ax6、ax7相距第二距离l5。
55.在行驶方向t为第一方向d1的情况下,行驶方向t上的前后的车轮21a和车轮21b大致排列在直线上,行驶方向t上的前后的车轮21c和车轮21d大致排列在直线上。在行驶方向t为第二方向d2的情况下,在四边形qd2中,行驶方向t上的前后的车轮21a和车轮21c大致排列在直线上,行驶方向t上的前后的车轮21b和车轮21d大致排列在直线上。
56.这样,在第二实施方式的行驶车系统sys2中,无论在行驶车v2在第一方向d1及第二方向d2中的哪一方向上行驶的情况下,行驶方向t上的前后的车轮21均大致对齐成一条直线。因此,能够缩小车轮21在轨道r上通过的区域。
57.对第三实施方式进行说明。在本实施方式中,对与上述实施方式相同的结构标注相同的附图标记,并适当省略或简化其说明。另外,在本说明书的实施方式中说明的事项中的、能够应用于本实施方式的结构也适当在本实施方式中应用。
58.图13至图15是示意性表示第三实施方式的行驶车系统sys3中的行驶车v3的一例的俯视图,表示行驶车v3将行驶方向t从第一方向d1变更为第二方向d2的情况下的动作的一例。
59.本实施方式中的四边形qd3具有四个顶点p9~p12及四条边s9~s12。四边形qd3以任何一条边s9~s12都不与第一轨道r1及第二轨道r2平行的状态配置。该实施方式的四边形qd3虽然相对的边s9与边s12平行,但相对的边s10与边s11并不平行,因此不是菱形。此外,四边形qd3也可以是任何相对的边都不平行。在该结构中,四个车轮21以行驶方向t上的左右的两个车轮21在行驶方向t上错开的状态配置。
60.与位于顶点p9上的旋转轴ax9对应的车轮21a与旋转轴ax9相距距离l7。与位于顶点p10上的旋转轴ax10对应的车轮21b与旋转轴ax10相距距离l8。与位于顶点p11上的旋转轴ax11对应的车轮21c与旋转轴ax11相距距离l9。与位于顶点p12上的旋转轴ax12对应的车轮21d与旋转轴ax12相距距离l10。
61.在行驶方向t为第一方向d1的情况下,行驶方向t上的前后的车轮21a和车轮21b大致排列在直线上,行驶方向t上的前后的车轮21c和车轮21d大致排列在直线上。在行驶方向t为第二方向d2的情况下,行驶方向t上的前后的车轮21a和车轮21c大致排列在直线上,行驶方向t上的前后的车轮21b和车轮21d大致排列在直线上。
62.这样,在第三实施方式的行驶车系统sys3中,无论在行驶车v3在第一方向d1及第
二方向d2中的哪一方向上行驶的情况下,行驶方向t上的前后的车轮21均大致对齐成一条直线。因此,能够缩小车轮21在轨道r上通过的区域。
63.以上,使用实施方式对本发明进行了说明,但本发明的技术范围并不限定于上述实施方式所记载的范围。对于本领域技术人员而言,显而易见的是能够在上述实施方式中添加各种变更或改良。另外,在技术上不矛盾的范围内,能够将针对特定的实施方式说明的事项应用于其他实施方式。从权利要求书的记载可知,那种添加了变更或改良的方式也能包括在本发明的技术范围内。另外,在法律允许的范围内,援引日本专利申请特愿2020-189775及在上述实施方式等中引用的所有文献的公开内容,并将其作为本文记载的一部分。
64.例如,行驶车v、v2、v3既可以针对四个车轮21分别设置驱动车轮21的驱动源,也可以针对四个车轮21中的两个或三个车轮21分别设置驱动源。例如,即使行驶方向t上的左右的车轮21是驱动轮,行驶方向t上的左右的两个车轮21由于以在行驶方向t上错开的状态配置,所以也不会同时从间隙d通过。因此,行驶车v、v2、v3能够继续基于任一个驱动轮的行驶,行驶性稳定。
65.另外,行驶车系统只要在俯视时以四个旋转轴ax为顶点而形成的四边形的任何一条边都不与第一轨道r1及第二轨道r2平行即可,前后的两个车轮21也可以不在大致直线上对齐。在这种行驶车系统中,也能获得与上述实施方式相同的效果。
66.附图标记说明
67.10主体部
68.17、17a上部单元
69.20行驶部
70.21、21a~21d车轮
71.22辅助车轮
72.30连结部
73.34方向转换机构
74.ax、ax1~ax12旋转轴
75.c网格单元
76.d间隙
77.d1第一方向
78.d2第二方向
79.l1~l10距离
80.p1~p12顶点
81.qd、qd2、qd3四边形
82.r轨道
83.r1第一轨道
84.r2第二轨道
85.r3部分轨道
86.s1~s12边
87.sys、sys2、sys3行驶车系统
88.v、v2、v3行驶车
89.α1第一对角
90.α2第二对角。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。