1.本发明涉及顶管施工领域,尤其是涉及一种顶管工程施工土方竖向运输用提升架。
背景技术:
2.历史上在本领域中主要使用汽车吊进行管节吊装,采用自制简易卷扬机或“鸡公吊”进行出土。其施工步骤为:土方由设备悬臂端提升至顶管井孔口地面以上,然后水平旋转至顶管井以外地面弃土;顶管管节堆放于孔口附近,顶管施工中,现场需配备汽车吊一台,将管节起吊下放至顶管井底,与已经顶入的管节进行对接。此工艺主要缺点在于:自制简易卷扬机或“鸡公吊”为悬臂吊装设备,起重量受限,单次出土方量较小。自制简易卷扬机或“鸡公吊”通常无专业设计和计算,安全工作性能不可靠,存在侧翻的可能性较大。
3.为了改善该问题,现场常常采用普通的定型龙门吊作为起重吊装设备,但依然存在下列问题:设备尺寸较大,对现场净空等条件要求较高;工地现场地面情况复杂,门吊基础、轨道需要避障,施工麻烦。
技术实现要素:
4.本发明提供了一种顶管工程施工用提升架,解决了现有顶管施工吊装设备不满足复杂的施工现场工况的问题。
5.为解决上述技术问题,本发明所采用的技术方案是:一种顶管工程施工用提升架,包括横梁和在横梁上横向滑动的卷扬机,横梁两端各设有支腿立架,支腿立架包括至少两个斜撑,斜撑下端设有斜撑底板,斜撑底板下侧面设有万向轮和可调整高度的支撑地脚,地面设有混凝土预制块,混凝土预制块内设有多个预埋连接栓,支撑地脚下端设有法兰支撑板,预埋连接栓上端与法兰支撑板可拆卸连接。
6.优选的方案中,各支腿立架上端设有套杆,套杆中套接有可伸缩的伸缩杆,伸缩杆上端连接横梁,还设有顶升油缸,顶升油缸一端连接套杆,顶升油缸另一端连接伸缩杆。
7.优选的方案中,横梁两端各设有可横向滑动的滑架装置,滑架装置下端设有转台装置,转台装置下端与支腿立架上端连接。
8.优选的方案中,斜撑底板上设有第一激光测距传感器和第二激光测距传感器,地面设有u型导向槽,u型导向槽两侧设有立边,第一激光测距传感器和第二激光测距传感器用于检测u型导向槽的立边。
9.优选的方案中,斜撑底板至少四角设有转动臂架,转动臂架中部与斜撑底板铰接,转动臂架一端设有滚动轮,滚动轮用于接触u型导向槽的立边,转动臂架的中部铰接处设有编码器。
10.优选的方案中,斜撑底板至少四角设有转动臂架,转动臂架中部与斜撑底板铰接,转动臂架一端设有滚动轮,滚动轮用于接触u型导向槽的立边,转动臂架的另一端设有连杆,斜撑底板上设有滑套,滑套中设有可滑动的滑杆,连杆两端分别与转动臂架和滑杆铰
接,滑杆端部设有楔形块,楔形块内设有贯穿孔,两个楔形块的贯穿孔初始对齐以使第一激光测距传感器或第二激光测距传感器发射的激光穿过并照射在u型导向槽的立边上,楔形块的楔形面朝向第一激光测距传感器或第二激光测距传感器。
11.优选的方案中,还设有第一弹簧和第二弹簧,转动臂架中部通过第一弹簧连接,转动臂架端部通过第二弹簧连接,转动臂架的中部铰接处设有阻尼套。
12.优选的方案中,斜撑底板下端设有驱动轮装置。
13.优选的方案中,斜撑底板前端设有前端挡板。
14.优选的方案中,套杆和伸缩杆设有多个沿高度方向的横向贯穿孔,插销插入套杆和伸缩杆的横向贯穿孔中。
15.本发明的有益效果为:采用预先施工的混凝土预制块和预埋连接栓,提升架可现场拼装并与预埋连接栓连接,多点支撑使得吊装更加稳定;预埋连接栓与法兰支撑板可拆卸,拆卸后提升架,对于地面及空中障碍物小的工况,可以当行走式龙门吊使用;具有多维调节能力,可改变净空、支腿立架间距、并且支腿立架可自转,提高了避障能力、增加了转向行走能力;提升架转运行走时具有自动居中和碰撞预检测功能,可以实时调整提升架居中行走,避免发生危险,减少转运时的操作人员,提高了转运心走效率。
附图说明
16.下面结合附图和实施例对本发明作进一步说明。
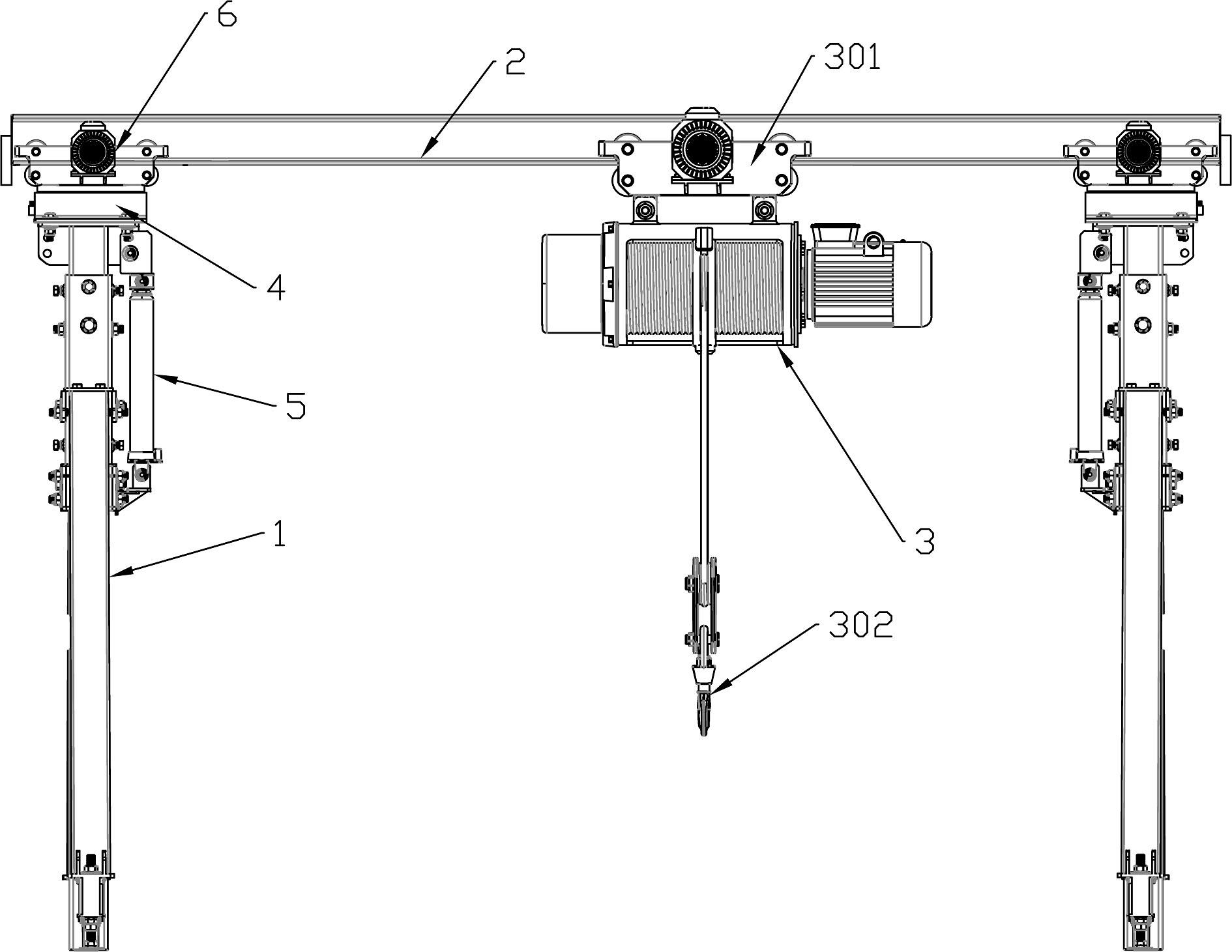
17.图1是本发明的正面示意图。
18.图2是本发明的侧面示意图。
19.图3是本发明的安装地基示意图。
20.图4是本发明的安装地基处详细图。
21.图5是本发明的伸缩杆锁定结构图。
22.图6是本发明的避障行走示意图。
23.图7是本发明的斜撑底板处检测居中结构示意图一。
24.图8是本发明的编码器及阻尼套安装示意图。
25.图9是本发明的斜撑底板处检测居中结构示意图二。
26.图中:支腿立架1;斜撑101;套杆102;伸缩杆103;斜撑底板104;万向轮105;驱动轮装置106;支撑地脚107;前端挡板108;法兰支撑板109;混凝土预制块110;预埋连接栓111;插销112;横梁2;卷扬机3;横移滑动架301;吊钩302;转台装置4;顶升油缸5;滑架装置6;u型导向槽7;第一激光测距传感器8;转动臂架801;滚动轮802;第一弹簧803;第二弹簧804;阻尼套805;编码器806;连杆807;滑杆808;楔形块809;滑套810;贯穿孔811;第二激光测距传感器9。
具体实施方式
27.如图1-9中,一种顶管工程施工用提升架,包括横梁2和在横梁2上横向滑动的卷扬机3,横梁2两端各设有支腿立架1,支腿立架1包括至少两个斜撑101,斜撑101下端设有斜撑底板104,斜撑底板104下侧面设有万向轮105和可调整高度的支撑地脚107,地面设有混凝土预制块110,混凝土预制块110内设有多个预埋连接栓111,支撑地脚107下端设有法兰支
撑板109,预埋连接栓111上端与法兰支撑板109可拆卸连接。
28.安装前检测地基承载力满足设计图纸要求,在顶杆工程竖井孔口外围施工至少四个混凝土预制块110,并在其中预埋预埋连接栓111,混凝土预制块110下端弯曲也可和另一预埋连接栓111利用横向钢筋连接。
29.在地面施工两条平行的轨道,将提升架沿着轨道移动至顶杆工程竖井孔口,将法兰支撑板109安装到预埋连接栓111露出端并锁紧。
30.卷扬机3钢丝端设有吊钩302,横梁2为工字形钢,横移滑动架301设有多组滚轮,滚轮抵靠在工字钢的边沿上,卷扬机3通过横移滑动架301与横梁2连接。
31.优选的方案中,各支腿立架1上端设有套杆102,套杆102中套接有可伸缩的伸缩杆103,伸缩杆103上端连接横梁2,还设有顶升油缸5,顶升油缸5一端连接套杆102,顶升油缸5另一端连接伸缩杆103。
32.两个支腿立架1均设有顶升装置,顶升油缸5工作时可同时顶起横梁2的两端,将横梁2的高度提升,横梁2升降功能能够保证提升架在工地转运时,避开净空不足的区域。
33.优选的方案中,横梁2两端各设有可横向滑动的滑架装置6,滑架装置6下端设有转台装置4,转台装置4下端与支腿立架1上端连接。
34.滑架装置6结构与横移滑动架301类似,滑架装置6上设有多个走行滚轮,抵靠在工字钢边沿上,并设有驱动电机,驱动电机轴端安装驱动轮,驱动轮为摩擦轮或齿轮,相应的横梁2上铺设摩擦条或齿条。
35.转台装置4有基座和转动台组成,之间安装直驱马达作为转动动力,转台装置4转角有一定限制,避免提升架侧翻。
36.横梁2高度可边的基础上,两个支腿立架1可以相对内缩移动,减小提升架的占地宽度,同时支腿立架1自转,也就是说,支腿立架1的水平角度可变,地面轨道可以转向,避开工地上的一些高台、空洞等位置。
37.优选的方案中,斜撑底板104上设有第一激光测距传感器8和第二激光测距传感器9,地面设有u型导向槽7,u型导向槽7两侧设有立边,第一激光测距传感器8和第二激光测距传感器9用于检测u型导向槽7的立边。
38.在地面铺设u型导向槽7后,由于横梁2和两个斜撑101的跨度较大,提升架移位时通常需要两或四个人站在各斜撑101下端附近,监测万向轮105与u型导向槽7侧立边相对位置,防止万向轮105撞破立边,提升架脱轨侧翻,也就是说需要一个操控者,四个监测者进行提升架的转运作业,十分浪费人力,并且人员之间需要多次沟通,提升架经过多次启、停、转向操作才能到达目的地,效率低。为了改善转运及避障时的监测能力,在斜撑底板104撒谎给你安装第一激光测距传感器8和第二激光测距传感器9,始终照射u型导向槽7的立边,将数值告知外部的控制系统,时刻保证斜撑底板104居中,只需要一个控制者即可顺利转运提升架。
39.优选的方案中,斜撑底板104至少四角设有转动臂架801,转动臂架801中部与斜撑底板104铰接,转动臂架801一端设有滚动轮802,滚动轮802用于接触u型导向槽7的立边,转动臂架801的中部铰接处设有编码器806。
40.优选的方案中,斜撑底板104至少四角设有转动臂架801,转动臂架801中部与斜撑底板104铰接,转动臂架801一端设有滚动轮802,滚动轮802用于接触u型导向槽7的立边,转
动臂架801的另一端设有连杆807,斜撑底板104上设有滑套810,滑套810中设有可滑动的滑杆808,连杆807两端分别与转动臂架801和滑杆808铰接,滑杆808端部设有楔形块809,楔形块809内设有贯穿孔811,两个楔形块809的贯穿孔811初始对齐以使第一激光测距传感器8或第二激光测距传感器9发射的激光穿过并照射在u型导向槽7的立边上,楔形块809的楔形面朝向第一激光测距传感器8或第二激光测距传感器9。
41.滚动轮802初始时并不接触u型导向槽7的立边,第一激光测距传感器8和第二激光测距传感器9实时检测距离u型导向槽7两侧立边的距离通过计算,调整斜撑底板104居中,但是,工地现场出现高台或孔洞需要u型导向槽7避让转向时,由于第一激光测距传感器8和第二激光测距传感器9安装于斜撑底板104中部,斜撑底板104前端边角容易触碰立边,此时有两种改善方法,第一种是安装转动臂架801、滚动轮802并在转动臂架801中部铰接处安装编码器806,当滚动轮802碰到立边转向时,编码器806检测到角度变化并可检测到模拟量的转角数值,根据该值,提升架可精确的计算转角量,并调整斜撑底板104居中。但是由于至少设有四个斜撑底板104,每个斜撑底板104上又有转台装置4个编码器806,外加第一激光测距传感器8和第二激光测距传感器9,加起来费用较大,并且由于工地工况差,紧密电气元件过多易导致设备故障多,频繁报警。
42.另一种方式是,采用机械结构将转动臂架801的摆动与贯穿孔811的移动联系起来,利用本身有的第一激光测距传感器8和第二激光测距传感器9,检测滑架装置6个测量元素。具体的是将楔形块809中部掏空,初始时,第一激光测距传感器8透过斜撑底板104后端的两个楔形块809的贯穿孔811,可以照射到u型导向槽7的立边,第二激光测距传感器9透过斜撑底板104前端的两个楔形块809的贯穿孔811照射到u型导向槽7的另一立边。当一角的转动臂架801碰触到u型导向槽7的立边时转角,滑杆808滑移,贯穿孔811移位,第一激光测距传感器8或第二激光测距传感器9的光线被挡住,检测数值发生跳变,由于两个楔形块809距离第一激光测距传感器8或第二激光测距传感器9的距离不同,很容易判断是哪个转动臂架801转动。
43.并且为了指导控制系统计算转动臂架801的转角量,将楔形块809楔形面的一侧朝向激光传感器,当转动臂架801持续转动时,激光传感器的检测数值连续改变,实现与编码器806一样的模拟量监测。
44.优选的方案中,还设有第一弹簧803和第二弹簧804,转动臂架801中部通过第一弹簧803连接,转动臂架801端部通过第二弹簧804连接,转动臂架801的中部铰接处设有阻尼套805。
45.第一弹簧803、第二弹簧804和具有一定摩擦阻力的阻尼套805可以保证转动臂架801不会在提升架行走振动时频繁摆动,可以稳定在某转角。
46.优选的方案中,斜撑底板104下端设有驱动轮装置106。
47.驱动轮装置106包括基础连接架,基础连接架上端与斜撑底板104下端转动连接,并安装有转向减速电机,基础连接架设有行走轮,行走轮转轴处设有行走去驱动电机。
48.优选的方案中,斜撑底板104前端设有前端挡板108。
49.提升架行走时,前端挡板108拨开u型导向槽7中的石头。
50.优选的方案中,套杆102和伸缩杆103设有多个沿高度方向的横向贯穿孔,插销112插入套杆102和伸缩杆103的横向贯穿孔中。
51.通过插销气缸控制插销112的插入和缩回,顶升油缸5顶升到位时,插销气缸锁定支腿立架1的高度。
52.上述的实施例仅为本发明的优选技术方案,而不应视为对于本发明的限制,本发明的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
