技术特征:
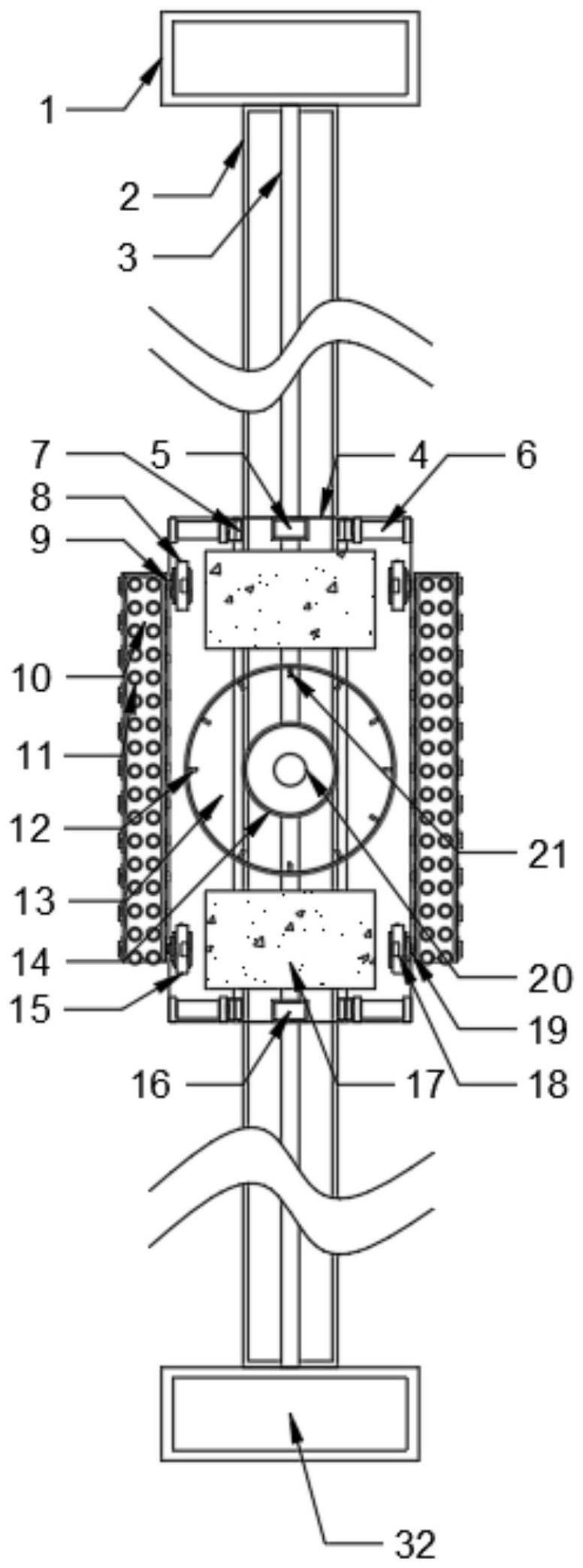
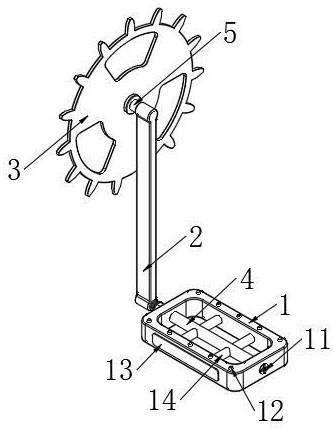
1.一种辅助式自攀爬机器人,包括限位绳索(2),限位绳索(2)外壁安装有高度刻度(3),限位绳索(2)的两端分别安装有顶限位悬挂件(1)和底限位悬挂件(32),限位绳索(2)外壁套设有攀爬件主体(4),其特征在于:攀爬件主体(4)的两端中间开口处分别安装有掉落感应件(5)和高度扫描件(16),攀爬件主体(4)的外壁中间两侧安装有太阳能板(17),攀爬件主体(4)的开口处两侧安装有与防掉落夹持件(7)相互配合的防掉落电动伸缩杆(6)和防掉落夹持件(7),且防掉落夹持件(7)安装在防掉落电动伸缩杆(6)的输出端,防掉落夹持件(7)的外壁覆盖有防滑夹持垫(22),攀爬件主体(4)的中间两侧安装有驱动信号接收组件,驱动信号接收组件上安装有攀爬组件,攀爬件主体(4)的外壁太阳能板(17)一侧安装有旋转组件,旋转组件上安装有角度感应组件,攀爬件主体(4)上安装有驱动模块组件,攀爬件主体(4)上安装有旋转模块组件。2.根据权利要求1所述的一种辅助式自攀爬机器人,其特征在于:驱动信号接收组件包括第一电机(8)、第一转动杆(9)、第二电机(15)、信号接收件(18)和第二转动杆(19),第一电机(8)安装在攀爬件主体(4)的内部上段两侧处,第一转动杆(9)安装在第一电机(8)的输出端,第二电机(15)安装在攀爬件主体(4)内部下段的两侧处,第二转动杆(19)安装在第二电机(15)的输出端,信号接收件(18)安装在第一电机(8)和第二电机(15)上,且信号接收件(18)与第一电机(8)和第二电机(15)电性连接。3.根据权利要求2所述的一种辅助式自攀爬机器人,其特征在于:攀爬组件包括攀爬链(10)和攀爬吸盘(11),攀爬链(10)套设在第一转动杆(9)和第二转动杆(19)外壁中间处,攀爬吸盘(11)覆盖在攀爬链(10)外壁中间两侧处。4.根据权利要求3所述的一种辅助式自攀爬机器人,其特征在于:旋转组件包括旋转电机(14)、旋转杆(20)和设备限位盘(13),旋转电机(14)安装在攀爬件主体(4)外壁太阳能板(17)内侧处,旋转杆(20)安装在旋转电机(14)的输出端,设备限位盘(13)安装在旋转杆(20)外端处。5.根据权利要求4所述的一种辅助式自攀爬机器人,其特征在于:角度感应组件包括旋转角度(12)和角度扫描件(21),旋转角度(12)安装在旋转电机(14)的外壁处,角度扫描件(21)安装在设备限位盘(13)外壁底中部处。6.根据权利要求5所述的一种辅助式自攀爬机器人,其特征在于:驱动模块组件包括上驱动模块(23)、控制模块(24)、下驱动模块(25)、高度扫描模块(26)、滑落感应模块(27)、防坠落模块(28)、旋转模块(29)和显示模块(31),控制模块(24)与上驱动模块(23)和下驱动模块(25)电性连接,上驱动模块(23)和控制模块(24)与高度扫描模块(26)电性连接,高度扫描模块(26)与滑落感应模块(27)电性连接,滑落感应模块(27)与防坠落模块(28)和显示模块(31)电性连接。7.根据权利要求6所述的一种辅助式自攀爬机器人,其特征在于:旋转模块组件包括控制模块(24)、旋转模块(29)、角度感应模块(30)和显示模块(31),控制模块(24)与旋转模块(29)电性连接,旋转模块(29)与角度感应模块(30)电性连接,角度感应模块(30)与显示模块(31)电性连接。8.根据权利要求7所述的一种辅助式自攀爬机器人,其特征在于:攀爬件主体(4)中间为中空结构,攀爬件主体(4)可沿着限位绳索(2)升降移动结构。9.根据权利要求8所述的一种辅助式自攀爬机器人的控制方法,其特征在于:包括如下
步骤:步骤一:通过顶限位悬挂件(1)和防滑夹持垫(22)将限位绳索(2)固定在攀爬点的上下两侧处,固定好后将攀爬件主体(4)套设在限位绳索(2)外壁处,套设好后通过攀爬链(10)上的攀爬吸盘(11)与墙壁进行吸附定位;步骤二:定位好后将设备安装在攀爬件主体(4)外壁的设备限位盘(13)上,安装好后工作人员启动第一电机(8)带动第一转动杆(9)、攀爬链(10)和攀爬吸盘(11)进行旋转,在旋转的过程中带动攀爬件主体(4)进行移动,在需要向下移动时启动第二电机(15)带动第二转动杆(19)、攀爬链(10)和攀爬吸盘(11)进行旋转反向移动;步骤三:在攀爬件主体(4)移动的过程中通过掉落感应件(5)与高度刻度(3)进行扫描测量移动的高度,在移动的过程中通过高度扫描件(16)进行实时监测,如若出现滑落的情况自动启动防掉落电动伸缩杆(6)推动防掉落夹持件(7)对限位绳索(2)进行夹持;步骤四:在需要旋转时启动旋转电机(14)带动旋转杆(20)和设备限位盘(13)进行旋转,在设备限位盘(13)进行旋转的过程中通过旋转角度(12)和角度扫描件(21)进行检测,在检测的过程中将数据传输给操作人员。
技术总结
本发明公开了一种辅助式自攀爬机器人及控制方法,属于攀爬机器人技术领域,攀爬件主体的两端中间开口处分别安装有掉落感应件和高度扫描件,攀爬件主体的开口处两侧安装有与防掉落夹持件相互配合的防掉落电动伸缩杆和防掉落夹持件,在攀爬件主体移动的过程中通过掉落感应件与高度刻度进行扫描测量移动的高度,在移动的过程中通过高度扫描件进行实时监测,如若出现滑落的情况自动启动防掉落电动伸缩杆推动防掉落夹持件对限位绳索进行夹持;在需要旋转时启动旋转电机带动旋转杆和设备限位盘进行旋转,在设备限位盘进行旋转的过程中通过旋转角度和角度扫描件进行检测,在检测的过程中将数据传输给操作人员,达到防坠落和多组吸附件进行移动吸附。组吸附件进行移动吸附。组吸附件进行移动吸附。
技术研发人员:张文典 张勇忠
受保护的技术使用者:长春汽车工业高等专科学校
技术研发日:2023.04.04
技术公布日:2023/7/19
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。